應用CPLD實現火炮位置測量
2013-09-12 07:50:16盛小波賈致紅
兵器裝備工程學報 2013年12期
關鍵詞:信號
盛小波,賈致紅,楊 斐
(重慶望江工業有限公司,重慶 400071)
在火炮隨動控制應用中,以往采用自整角機和受信儀等測量裝置來實現位置測量,結構復雜,在數字系統中還需要雙通道SDC轉換。現采用絕對值編碼器,其傳輸速度快,精度高,抗干擾能力強,不管編碼器的分辨率多少,時鐘線和數據線只有4根,硬件接線簡單方便,從而省去了復雜的電路和昂貴的測量機構。而碼盤一般采用的編碼方式為格雷碼制,在用戶接口可以是格雷碼,也可以是二進制碼等,與其他編碼方式比較,格雷碼屬于可靠性編碼,是一種錯誤最小化的編碼,因為它大大地減少了由一個狀態到下一個狀態時的混淆,可減少出錯的可能性,這就允許代碼電路能以較少的錯誤在較高的速度下工作。
采用格雷碼制的同步串行接口絕對值編碼器,就必須解決格雷碼到二進制碼的轉換,還需要解決時鐘脈沖發送和串行數據接收等數據處理問題。實現格雷碼轉換為二進制碼和相關數據處理的方法有多種,例如采用處理器、FPGA或CPLD。利用處理器實現格雷碼到二進制碼的轉換和相關數據轉換,占用處理器資源,效率低下。FPGA是現場可編程門陣列,其內部可編程資源豐富,可以實現格雷碼到二進制碼和相關數據處理,但是和復雜可編程邏輯CPLD相比,FPGA時序不可預測,上電工作需要一個加載過程,而CPLD擁有上電即可工作的特性,并且CPLD在本質上很靈活、容易使用、時序可預測、速度高、路由性能極好,用戶可以在線編程,改變他們的設計同時保持引腳輸出不變。
1 SSI絕對值旋轉編碼器特性
SSI接口用于傳輸編碼器位置數據到控制器,控制模塊發送一串時鐘脈沖信號,絕對值編碼器響應位置數據。SSI信號變化標準見圖1。
1)麗水白云山森林公園氣溫日變化,午后14:00最高,早晨06:00最低。隨著海拔的增加,氣溫逐漸降低的同時氣溫日較差也隨之縮小。日平均氣溫隨海拔的遞減率約0.6 ℃/100 m,午后較高(0.8 ℃/100 m),夜間較低(0.5 ℃/100 m)。白天溫度明顯高于夜間,白天的溫度隨海拔遞減率(0.7 ℃/100 m)也明顯大于夜間。氣溫年變化,7月最高,1月最低,隨著海拔的升高,年平均氣溫降低,同時氣溫年較差也減小。年平均氣溫隨海拔遞減率0.6 ℃/100 m,其中7—10月較高(約0.7 ℃/100 m)。
鋼筋網安裝就位后進行混凝土鋪筑施工。采用5t或10t的混凝土運輸車從拌和樓運料,料車車廂底部覆蓋塑料薄膜,以防運輸過程中有滴漏現象,出站時采用油布覆蓋嚴密,防止混合料水分蒸發損失。自卸卡車到達現場后將混合料卸于料斗后,由料斗將混合料倒入已安裝好鋼筋網的模板中[3]。混凝土振搗采用自動排式振搗架,振搗棒振動頻率在50~100Hz間,每次插入振動時間不超過10min,振搗時注意不能出現虛振、漏振現象,保證鋪筑質量均勻。攤鋪整平、碾壓提漿采用三輪整平提漿機進行作業,抹面結束后采用毛刷拉毛。
硬件電路結構圖2中,有高低編碼器和方位編碼器兩個不同位置方向的編碼器,分別用來識別高低方向和方位方向的位置。兩個旋轉編碼器與CPLD之間分別通過各自的接口轉換芯片,實現422電平轉換和數據的高速傳輸。選用ALTERA公司的MAX 7000S系列CPLD,它具有128個宏單元,其可編程資源滿足本次設計所需。根據采集旋轉編碼器數據的需要,在線對CPLD進行編程。通過編程,在處理器數據采集允許情況下,產生同步脈沖信號發送給旋轉編碼器,編碼器同步響應格雷碼串行數據信號,CPLD對回傳的數據信號進行一系列相應的處理,轉換成二進制并行數據并緩存,同時向處理器發出數據采集是否好的標志位。圖2中,處理器運行在100 MHz的工作主頻,通過控制總線和數據采集好標志位,讀取緩存在CPLD內部單元的旋轉編碼器位置數據。

圖1 SSI信號變化標準
數據采集信號輸入條件有效時,產生移位鎖存采集信號,作為采集并且鎖存旋轉編碼器回傳的串行數據脈沖。移位信號上升沿觸發移位,鎖存信號低電平處于鎖存期間,高電平則為鎖存好狀態。
2 硬件電路結構及工作原理
2.1 硬件電路結構
采集旋轉編碼器回傳的數據信號,根據旋轉編碼器SSI信號變化標準特性,分離出數據末位后的特殊標志位,采集的數據有效時,特殊標志位為低電平,采集的數據無效時則表現出高電平,處理器通過讀取特殊標志位的狀態判斷數據是否有效,便于確定旋轉編碼器物理線路是否有效連接。
咱都是親媽,自然是想著把最有營養的提供給娃,菠菜補鐵效果好必須得吃啊,胡蘿卜護眼效果一流不應該放過啊。但很可能,寶寶對你提供的食物完全沒有興趣,千萬不要因為某種食物營養高就強塞、硬喂,一旦寶寶有過不好的進食體驗,就會更加抵觸輔食。不喜歡吃胡蘿卜沒關系啊,過段時間也許就喜歡了呢,大不了換一種唄,世間的食材那么多,每種都有各自的營養。

圖2 硬件電路結構示意圖
2.2 工作原理
本設計與處理器接口采用并行接口,16位數據總線,3位地址總線,2位讀寫控制線,1位片選線,2位狀態線,并行接口使系統讀取位置數據的耗時開銷最少。主要原理如下:
1)開機初始化,發送數據采集允許信號,判斷CPLD是否工作正常,并啟動CPLD采集當前數據量。CPLD接收到數據采集允許信號,即刻向旋轉編碼器發出可靠的同步脈沖信號,旋轉編碼器收到同步脈沖信號后同步響應格雷碼制串行信號,CPLD則在發送同步脈沖的同時,接收旋轉編碼器回傳的數據信號,并同時進行格雷碼轉換、數據的串-并轉換,轉換速度快,耗時相當少。轉換好的并行二進制數據信號緩存于CPLD的宏單元當中,在非數據緩存期間,置數據采集好信號為有效狀態。
2)根據地址總線,在CPLD內部實現地址譯碼后,依據控制總線,數據總線輸出對應狀態數據,從而實現處理器對當前數據的讀取。處理器根據讀取到的不同狀態數據,判斷旋轉編碼器硬件是否連接正常,定時讀取CPLD采集到的位置數據,并且在空閑期間對連續多次采集到的數據進行判別,剔除非正常數據點保留有效數據,確保所讀取數據的準確性。
3 CPLD內部電路設計和仿真
輸入條件有效成立時,產生清零信號,每次存儲新數據前進行清零,避免下次讀取的數據不準確。

圖3 CPLD內部電路結構框圖
3.1 同步脈沖發生
要實現對旋轉編碼器的數據采集,首要前提是產生適合所選旋轉編碼器的時鐘信號和接收數據信號所需的信號。同步脈沖發生部分以硅振蕩器產生的穩固時鐘源為時鐘信號基準,以編碼器SSI信號變化標準為依據,分析出時鐘信號和數據信號的特點,根據實際采用圖形編程,并靈活結合verilogHDL硬件語言編程,設計出相應的數據移位脈沖、數據鎖存信號和數據清零信號,利用MAX+plus lI開發工具生成如圖4所示的簡化符號,左邊的系統復位sys-reset信號、時鐘基準信號clkin、數據采集允許信號pulse-turn-on為輸入信號,右邊的移位脈沖信號maich、數據鎖存信號dhao、清零信號clear等為該部分的輸出信號。
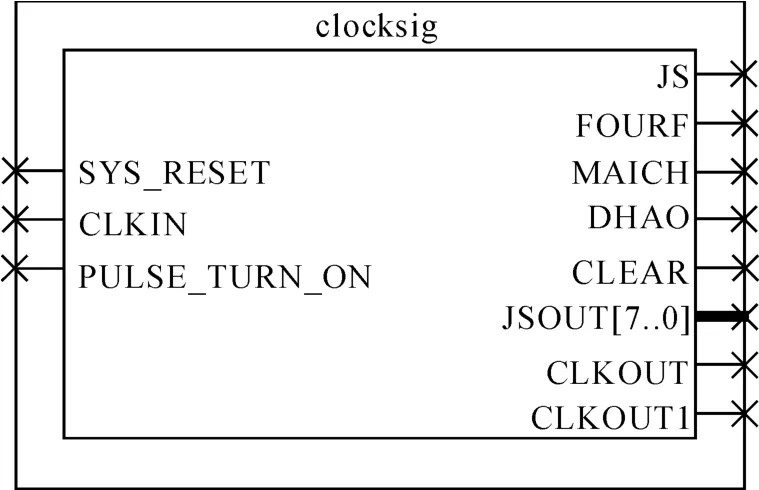
圖4 同步脈沖發生符號
將1.84 MHz的穩固時鐘源轉換成0.46 MHz脈沖。數據采集信號輸入條件有效時,產生符合旋轉編碼器特性的同步時鐘脈沖信號,周期為113 μs。
病株上的葉脈、葉柄及莖均有黑褐色壞死條斑,并發脆易折。感病初期葉片呈現斑駁花葉或有枯斑,以后背面葉脈壞死,甚至沿葉柄蔓延至主莖。主莖發病時產生褐色條斑,導致全葉萎蔫,但不脫落。重花葉病由Y病毒侵染引起。Y病毒既可以通過汁液機械傳染,又可以通過蚜蟲傳染。
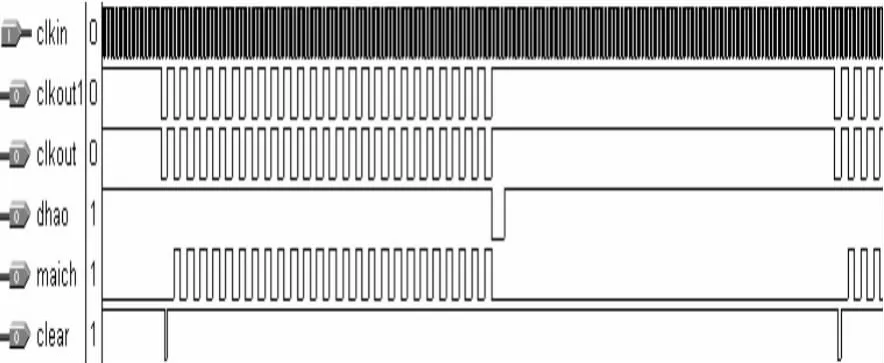
圖5 同步脈沖發生部分仿真波形
該同步脈沖發生塊實現了如下功能:
圖5為同步脈沖發生部分功能仿真波形,其中clkin為模擬振蕩器產生的輸入波形,clkout和clkout1為發送給旋轉編碼器的同步脈沖時鐘信號,輸出信號dhao、maich和clear用以做數據轉換塊的輸入信號,分析該仿真波形信號,符合SSI旋轉編碼器的時鐘信號和接收其數據信號的標準。
空載條件下信號線“數據+”和“時鐘+”為高電平(5 V);當時鐘信號第一次從高電平跳至低電平時,儲存在編碼器的當前信息(位置數據(Dn)和特殊標志位(S))的數據就進行傳輸;在第一個脈沖上升沿到來時,編碼器串行數據 首位[MSB]輸出;隨著一個個脈沖上升沿的到來Dn-1,Dn-2…位就逐一傳輸;最后一位(LSB)傳輸完畢,單穩態觸發時間Tm截止前,數據線跳至低電平;數據線跳至高電平之前或時鐘中斷Tp時間截止前,不會有數據傳輸進行;單穩態觸發時間Tm決定了最低傳輸頻率;周期時間T≤1MHz,單拍時間Tm(10 ~30 μs),時鐘間隙 Tp≥Tm。
CPLD內部電路是采集編碼器串行數據電路設計的重點。ALTERA公司的CPLD開發工具 MAX+plus lI,支持多種輸入方式,給設計開發提供了極大的方便,因此本系統采用MAX+plus lI進行設計。系統的主體部分用原理圖輸入方式,由于庫中提供現成的芯片,并且可以自己根據實際需要,靈活選擇VerilogHDL、VHDL硬件編程語言等其它輸入方式設計,設計出特定功能的部件,還可實現功能仿真,所以使用很方便。CPLD內部電路結構框圖如圖3所示。
3.2 有效數據判斷
圖2所示,為硬件電路結構示意圖,處理器、CPLD芯片、接口轉換芯片、編碼器和時鐘源是硬件電路的主要組成部分。采用具有較高的抗震動、電擊及 EMI沖擊的能力的硅振蕩器作為時鐘源,確保火箭炮在惡劣的環境下也可以穩定的工作。
3.3 數據轉換
數據轉換塊屬于寄存器傳輸級RTL采集位置數據設計。數據轉換處理的設計影響數據處理的可靠性,是采集位置數據的重要部分。
采用的倍加福生產的SSI接口型格雷碼制編碼器,單圈最大精度為16位,多圈最大精度為30位。根據應用對象的技術指標要求,可靈活選取多圈的圈數,在此取多圈2位即可達到應用要求。在收到旋轉編碼器響應回傳的格雷碼制串行數據后,邏輯轉換成為機器易識別的二進制碼并行數據,轉換法則是:保留格雷碼的最高位作為自然二進制碼的最高位,而次高位自然二進制碼為高位自然二進制碼與次高位格雷碼相異或。利用產生的同步脈沖的數據移位脈沖、數據鎖存信號和數據清零信號,作為該部分的輸入控制信號,根據SSI時鐘信號和數據信號的時序特點,設計出合理的采集位置數據機制,僅占用62個宏單元。數據轉換部分結構框圖如圖6所示,利用開發工具生成的簡化符號如圖7所示。

圖6 數據轉換塊結構框圖

圖7 數據轉換塊符號
在功能仿真環境的仿真測試中,得到如圖8所示波形。其中,輸入信號datainF和datainG表示模擬方位和高低編碼器回傳的串行數據信號,clkyiw、dhao和clear表示同步脈沖發生塊產生的移位、鎖存和清零信號。從如下仿真的輸出信號 Gout[15:0]和 Fout[15:0]輸出波形圖看出,該模塊的設計達到了預期效果。
⑤防浪墻變形縫。為避免防浪墻因溫度應力或壩體不均勻沉降而產生裂縫,沿其長度方向每隔15m設一道變形縫,變形縫位置與面板接縫錯開,縫內設一道橡膠止水帶。

圖8 數據轉換模塊仿真波形
3.4 數據輸出控制
數據輸出控制塊是依據讀寫控制總線和地址總線,通過CPLD內部譯碼芯片74138譯碼生成對應的選通信號,數據傳輸期間選通對應的信號輸出至數據總線上。在CPLD非數據傳輸期間,置數據總線的I/O口于三態,不影響處理器和系統其他部分的接口數據交換。
老年人日常照料的差序格局反映老年人在需要照料時所能夠獲得的資源的排序,差序格局以老年人為中心,如圖1(老年人日常照顧結構)所示:各個不同角色圍繞老年人中心形成一個個圈層,越靠近中心,對老年人的照料支持越大[6]。
4 結束語
火炮位置測量是火炮隨動控制重要組成部分,其精確度和可靠性將直接影響到全武器系統的作戰性能。該方案不同于傳統的測量方法,通過實際應用證明有以下優點:數據處理速度高,測量位置的時間不大于200 μs,并且保證了所采集數據的準確性和可靠性,為處理器節省了寶貴的時間,適合于火炮隨動控制;其結構實現簡單,價格較傳統實現低,具有經濟價值和實用性。
[1]張衛寧.TMS320C280x系列DSP的CPU與外設[M].北京:清華大學出版社,2004.
[2]趙曙光,預萬有,楊頌華.可編程邏輯器件原理、開發與應用[M].西安:西安電子科技大學出版社,2000.
[3]候伯亨,顧新.VHDL硬件描述語言與數字邏輯電路設計[M].西安:西安電子科技大學出版社,2002.
[4]黃正瑾.CPLD系統設計技術入門與應用[M].北京:電子工業出版社,2002.
[5]高國燊,余文烋.自動控制原理[M].廣州:華南理工大學出版社,2003.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
