基于氣隙功率補償改善電機低速性能方法
2013-09-13 12:43:02王生波
電子測試 2013年19期
關鍵詞:方法
王生波
(山東山推工程機械股份有限公司,山東 濟寧,272073)
0 引言
目前應用比較廣泛的調速方法是開環V/f(恒壓頻比控制方法)控制。雖然這種方法比較簡單,但是如果在低速運行的時,此種方法性能缺陷非常明顯。這是因為定子電阻的檢測、定子電阻壓降的補償以及轉差補償無法實時實現。為了解決這個問題,文章提出了基于氣隙功率補償改善電機低速性能方法。該方法充分利用定子磁場矢量定向的思想,而且在實際的應用當中只需要定子電阻和電機的額定銘牌參數確定即可,并且算法的通用性也可以大大增加。
1 基于氣隙功率的補償方法
1.1 定子電阻壓降的補償
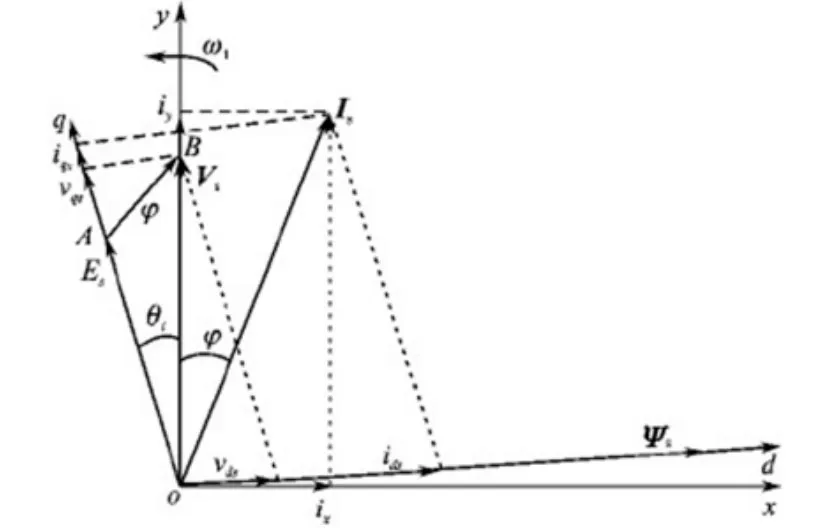
圖1 2種坐標系下的矢量關系
在忽略漏阻抗相對定子電阻時,定子電壓、磁場矢量關系如圖1所示。
圖1中的(d,q)和(x,y)分別是定子磁場、電壓矢量定向下的坐標軸。和Vs分別是功率因數角和電壓矢量幅值。(ids,iqs)和(ix,iy)是電流。
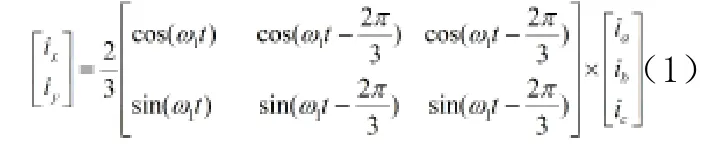
假設ia,ib,ic是三相對稱電流,則有功、無功電流分量在穩態時可表示為:
通過電壓和電流的矢量關系可得:
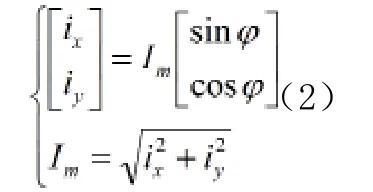
式(2)中,Im為電流幅值。

因為定子漏阻抗是忽略不計的,所以可以得出以下結論,那就是氣隙磁通就等于定子磁通。所以此時的氣隙反電動勢可表示成:

設VR是額定反電動勢幅值電壓,fR是額定功率,f1是給定功率,所以有:

如果把式(5)代入到式(4)中,即可得出:

把式(2)代入到式(6)中,則能表示為:
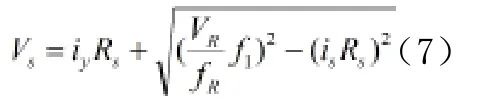
由式(6)可以看出,只需要電流矢量的瞬時值就能算出Vs,這樣就能很好的提高系統的運算速度。此種方法就是所謂的定子電阻壓降的矢量補償方法。
1.2 轉差頻率的補償方法
如果要轉子輸出速度保持不變,必須要滿足電機的運行機械特性曲線為平行線的條件。為了確定負載力矩和轉差的關系,必須要根據實際的電機力矩速度機械特性曲線特性,利用非線性轉差補償的方法。轉差頻率可表示成:
式(8)和(9)中,A,B 為常量,分別為 :

式(10)中,p和Pgap分別是電機的磁極對數和氣隙功率T是電機過載倍數,fslip、f1*和fN分別是轉差、設定和額定頻率,sN和TN分別是額定轉差、力矩。
如果參數T很大,A、B很小,線性力矩速度近似公式就能通過簡化式(8)得到:

1.3 氣隙功率的估算
氣隙功率通過電機的功率平衡關系可表示為:

式(11)中,Pcore是電機內部總損耗。在實際的應用當中,Pcore很難精確算出,只有通過試驗的方法近似的得到。額定運行頻率下電機的額定損耗可表示成:
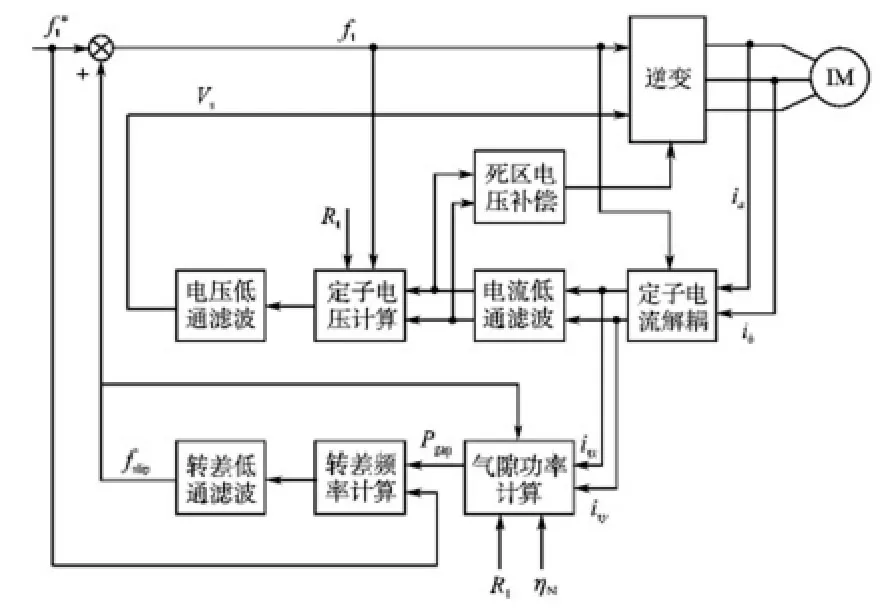
圖2 控制系統結構圖
式(13)、(14)中,s=fslip/fe,N 是額定效率,ImN是額定電流峰值。
氣隙功率可以通過式(12)~(14)算出來,轉差頻率可以把結果代入式(12)得到。圖2是控制系統結構圖。
2 測試結果
為了驗證此方法的正確性,進行了物理實驗,測試結果如圖3~4所示。
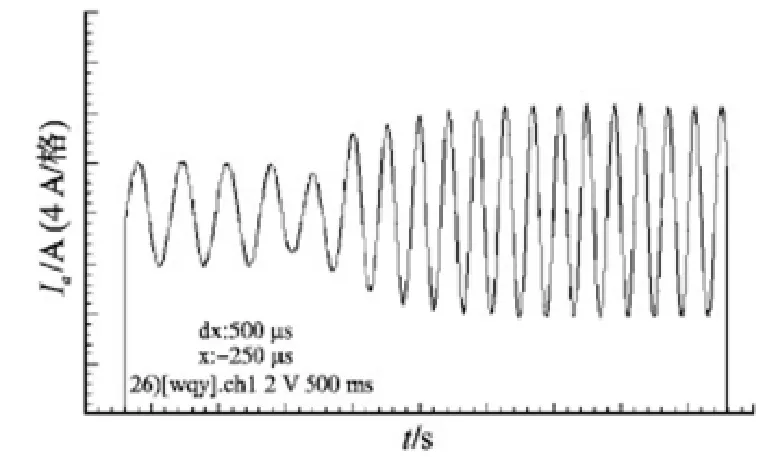
圖3 3Hz額定負載時電流試驗波形
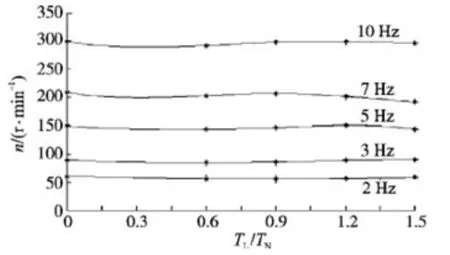
圖4 試驗得到的低頻力矩速度曲線
由圖3可以看出,電機在低速運轉時,轉速很穩定,基本沒有轉速誤差。
由圖4可以看出,在電機的轉速基本上不隨負載力矩的變化而變化。
3 結論
傳動領域中最難解決的問題就是電機在低速運轉時的性能不佳。文章提出的基于氣隙功率補償改善電機低速性能方法,此方法能很好的解決這個問題。其核心思想是,對系統低速運行時的電阻壓降和轉差頻率進行了相應的補償。為了驗證此方法的正確性,文章還進行了物理性測試。測試結果表明,此方法在低速時不但能很好的提高系統帶負載能力,而且穩態時的速度誤差也得到了很好的控制。
[1]楊濤.李文英.乳化液泵站液壓系統建模仿真與控制系統研發[D].太原:太原理工大學,2008:86-87.
[2]劉建坤.張倫健.李曉.基于三電平的優化SPWM調制算法的研究[J].電氣傳動,2013, 43(2):48-51.
[3]陸兵.劉維亭.三相SPWM 逆變器的調制建模和仿真[J].電子設計工程,2013,21(1):132-134.
[4]賈曉梅.基于變頻調速技術的旋轉門智能控制系統[J].沈陽工程學院學報( 自然科學版),2013,9(1):66-68.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
