基于時延預測的空間遙操作系統廣義預測控制
2013-09-19 00:50:42楊艷華陽方平李洪誼化建寧
載人航天 2013年2期
楊艷華 ,陽方平 ,李洪誼 ,化建寧,張 峰,余 飛
(1中國科學院沈陽自動化研究所機器人學國家重點實驗室,遼寧沈陽110016;2泉州師范學院應用科技學院,福建泉州362000;3中國科學院大學,北京100049;4東北大學,遼寧沈陽110014)
1 引言
空間遙操作系統為人類探索空間環境和完成復雜的空間任務提供了便利。然而,由于信號的長距離傳輸,空間遙操作系統的回路時延通常可達幾秒甚至幾十分鐘[1]。對于空間遙操作,這種大時延將嚴重影響操作控制反饋的實時性和透明性,從而影響空間遙操作的安全性及可靠性,而且大的時變時延可能使系統失去穩定性。因此,許多學者針對遙操作系統的時延問題提出了多種控制方法[2-14]。
自從Anderson提出基于無源的控制算法以保證系統的穩定性后,很多學者將該方法應用于位置跟蹤,時變時延的穩定性分析,以及許多其他的控制目標中[3-4]。然而,基于無源性理論的控制算法雖然能保證任何時延下的穩定性,但是當時延超過2s時系統透明性嚴重下降[5]。另一種遙操作系統的控制方法是基于H∞理論的方法,Leung和Francis等人[6]將時延建模為系統擾動,根據μ-綜合設計控制器使系統滿足穩定性的同時,還對這種時延擾動具有魯棒性。文獻[7-8]在假設時延有上界的情況下,設計了H∞控制器使得遙操作系統穩定,且滿足給定的性能指標。這些方法都需要假定時延的上界,然后再優化一個全局目標,因此若假定的時延上界較大則得到的結果必然保守,而假定的時延上界較小卻又很難適應各種實際情況。另外,日本的Imaida等人[9]采用比例微分(Proportion Differentiation,PD)控制方法在大約7s的回路時延下使得雙邊遙操作系統穩定,而且在ETS-VII型衛星上成功完成了斜坡跟蹤和插孔試驗。
由于模型預測控制(model predictive control,MPC)在補償大時延和解決輸入輸出約束等方面具有很大的優勢,因此學者們提出將MPC用于遙操作系統的控制中[10-14]。Sheng和Spong[10]提出了一種改進的模型預測控制方法解決遙操作系統的時延和輸入輸出約束問題。該方法能夠提高雙邊遙操作系統在時延不確定情況下的魯棒性,但是該方法只適用于固定時延的情況。2005年,Slama等[11]將廣義預測控制(generalized predictive control,GPC)方法用于控制具有通訊時延和力反饋的雙邊遙操作系統,提出了一種時延GPC(Delayed GPC)而且將機械時延系統的Π-freeness代數性質應用于從端以實現位置跟蹤。但是該方法也只考慮了固定時延的情況。2007年,Slama等又提出一種改進的GPC方法,即雙邊廣義預測控制器(BGPC)[12]。他們將這一控制器用于具有通訊延時和從端力反饋的遙操作系統中,考慮由于實時力反饋改變了參考軌跡導致參考軌跡預先未知的情形。而且,他們采用該方法對具有從端力反饋,變時延和數據丟失等特征的比例遙操作系統進行了試驗,取得了良好的控制效果[13]。陳丹和席寧等[14]針對互聯網遙操作系統提出了一種基于事件的GPC方法。該方法通過尋找一個與時間無關或者非時間顯函數的變量即事件作為運動參考,主端通過設計一個基于時延預測的路徑管理器在線產生一個適當的預測事件,從端通過設計一個廣義預測控制器計算冗余的控制信息以減小數據丟包和大時延對系統的影響。然而,這些算法要么只考慮固定時延,要么只考慮互聯網的時變小時延,均忽略了時變時延大于1s的情形。而且,現有方法通常將主端和從端看作是單自由度機械臂模型[12,13],然而在實際應用中往往需要多自由度的控制。因此,現有方法在實際應用中具有很大的局限性。
本文受文獻[12]和[14]啟發,針對具有多自由度主從端的空間遙操作系統的大時延問題,提出一種基于時延預測的GPC方法。在主端,設計時延預測器和GPC控制器,即在文獻[15]的基礎上,提出一種基于稀疏矩陣的核非線性回歸方法對時延進行預測。借鑒生物醫學上常用的非線性相關性定義方法計算時延序列的非線性相關系數,選取與當前時延具有強非線性相關性的先前時延序列作為樣本,采用核非線性回歸方法預測下一時刻的時延。再將多自由度從端的動力學模型線性化,建立線性狀態空間方程;操作者根據反饋的從端接觸力控制操縱桿給出參考位置和速度,結合前面預測的時延,采用基于狀態空間模型的方法設計GPC控制器使得系統穩定,并且滿足位置和速度跟蹤性能要求。在從端,設計一個非線性補償器以補償從端的非線性部分。最后,仿真結果表明,無論從端與環境是否接觸,本文所提方法均能實現較好的位置和速度跟蹤性能。
2 基于時延預測的空間遙操作系統結構
系統結構如圖1所示,主端系統在地面,從端在空間站,兩者之間通過網絡進行通訊。因為控制器的實現需要大量硬件設備,因此將時延預測器和GPC設在主端可以避免將這些設備運送至太空所花費的巨大代價[16]。在主端,操作者根據空間站反饋的從端機械臂和環境的作用力fed(t)控制操縱桿,操縱桿輸出參考位置ym(t)和參考速度vm(t)。然后,根據參考位置ym(t),參考速度vm(t),預測時延pTd(t),以及從端的時延位置反饋ysd(t),采用狀態空間模型的GPC計算控制量u(t),使從端機械臂跟蹤主端的參考位置和速度進行運動。因此,控制量到達從端的時延可看作是回路時延(round trip time delay,RTT)。時延預測器根據RTT的統計特征,采用基于稀疏矩陣的核非線性回歸算法預測下一時刻的時延pTd(t)。在從端,非線性補償器用于補償從端機械臂的非線性部分,并且將從端位置及從端與環境的作用力反饋給主端。
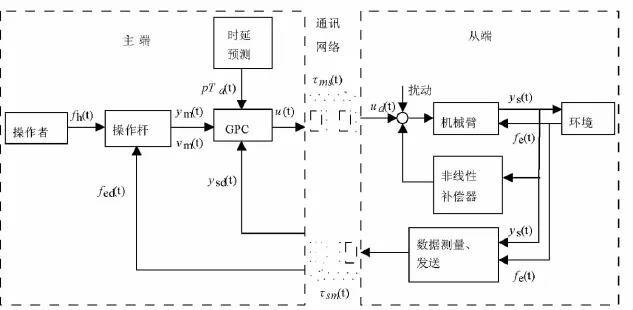
圖1 空間遙操作系統結構
3 時延預測
本文提出一種基于稀疏矩陣的核非線性回歸方法對時延進行預測。尋找與當前時延具有強的非線性關系的時延數據作為樣本,然后根據這些樣本采用基于核的非線性回歸方法進行預測。這種方法比文獻[15]提出的基于稀疏矩陣的線性回歸方法具有更好的預測精度[17]。
借鑒生物醫學領域的非線性相關性定義計算時延序列的非線性相關性[18],即若將Y看作是X的函數,那么給定X,便可根據非線性回歸曲線預測Y的值。這種情況下,根據回歸曲線估計出的Y方差稱為解釋方差(explained variance);將Y的真實方差減去由X估計出來的方差定義為未解釋方差;相關系數η2表示根據回歸曲線由X預測出的Y的方差的偏差。由于這個預測包含了一步非線性回歸,因此可以采用兩個數目有限的數據序列來估計它們的相關系數,以上系數的估計值稱為非線性相關系數h2。實際上,將X分成許多小區間,對于每個區間可以計算出X的中點值pi和Y在該區間的平均值qi,回歸曲線可以通過連接這些點(pi,qi)的直線段來近似逼近。那么X和Y的非線性相關系數可以寫成:
其中,f(xi)是非線性回歸曲線的分段線性近似。
類似地,將X看作是Y的函數可以估計出。估計值h2∈[0,1],等于零時表明X和Y是相互獨立的。若X和Y滿足線性關系,那么h2是對稱的,即,并且該值接近線性相關系數的平方即r2。對于非線性關系≠,而且差值Δh2表明非線性耦合的不對稱程度。即Δh2很小表明X和Y是非線性關系,且X是Y的單值函數,若Δh2較大表明X和Y是非線性關系,且X是Y的非單值函數。
用式(1)計算出時延序列的非線性相關系數,然后找出與當前時延具有強非線性相關性的時延序列作為回歸樣本,最后采用核回歸方法對下一時刻時延進行預測。
核回歸方法將樣本數據的特征映射到一個新的特征空間,再尋找能用線性形式表示的關系。然后,采用嶺回歸方法求解預測值[19]。下面簡要介紹核非線性回歸方法。
給定一個訓練集合S={(x1,y1),…,(xl,yl)},其中xi是來自X?Rn的點,對應的yi是來自Y?Rn。X和Y為非線性關系,尋找一個非線性實值函數g(X),使之為S的最優插值。根據訓練集合S,定義核函數:

其中,φ是從X到特征空間F的一個映射,φx∈Rn→φ(x)∈F?RN:。選擇映射φ的目的是把非線性關系轉化為線性關系。φ的作用是把數據集S重新編碼為S={(φ(x1),y1,…,(φ(xl),yl)}。其中 φ(xi)是來自X?Rn的點,問題轉換為尋找一個齊次線性實值函數:

使之為S的最優插值。
定義性能指標:

其中,w是回歸系數,y是實際值,g(x)是預測值,l是樣本數目,λ是一個正數,也是范數和損失之間的相對權衡,從而控制正則化的程度。將上式對w求導可得

其中,Gij=〈φ(xi),φ(xj)〉。列向量k包括值:ki=〈φ(xi),φ(x)〉,i=1…l。
根據時延的特征,選取如下高斯核函數:

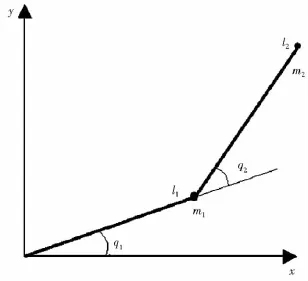
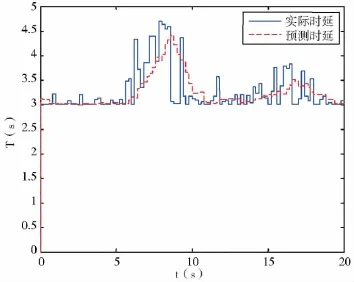
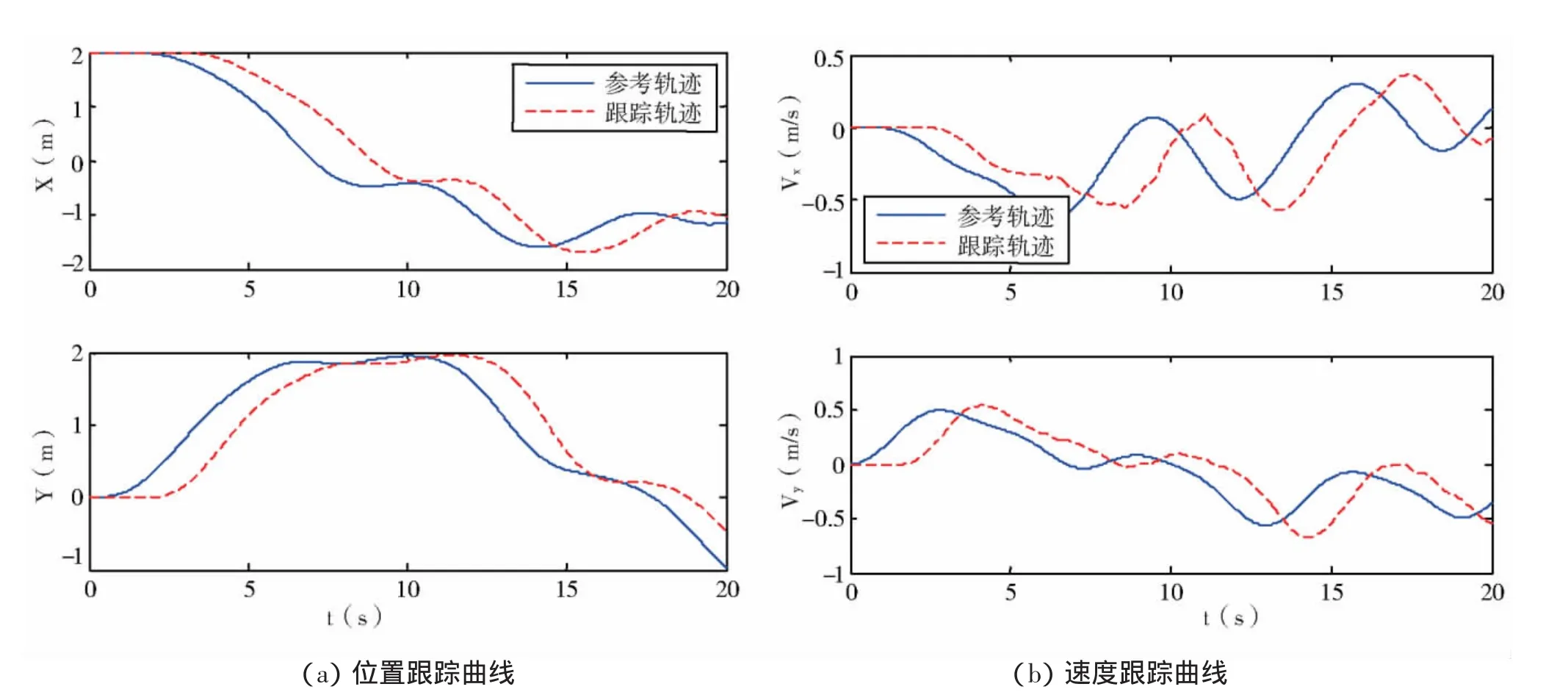
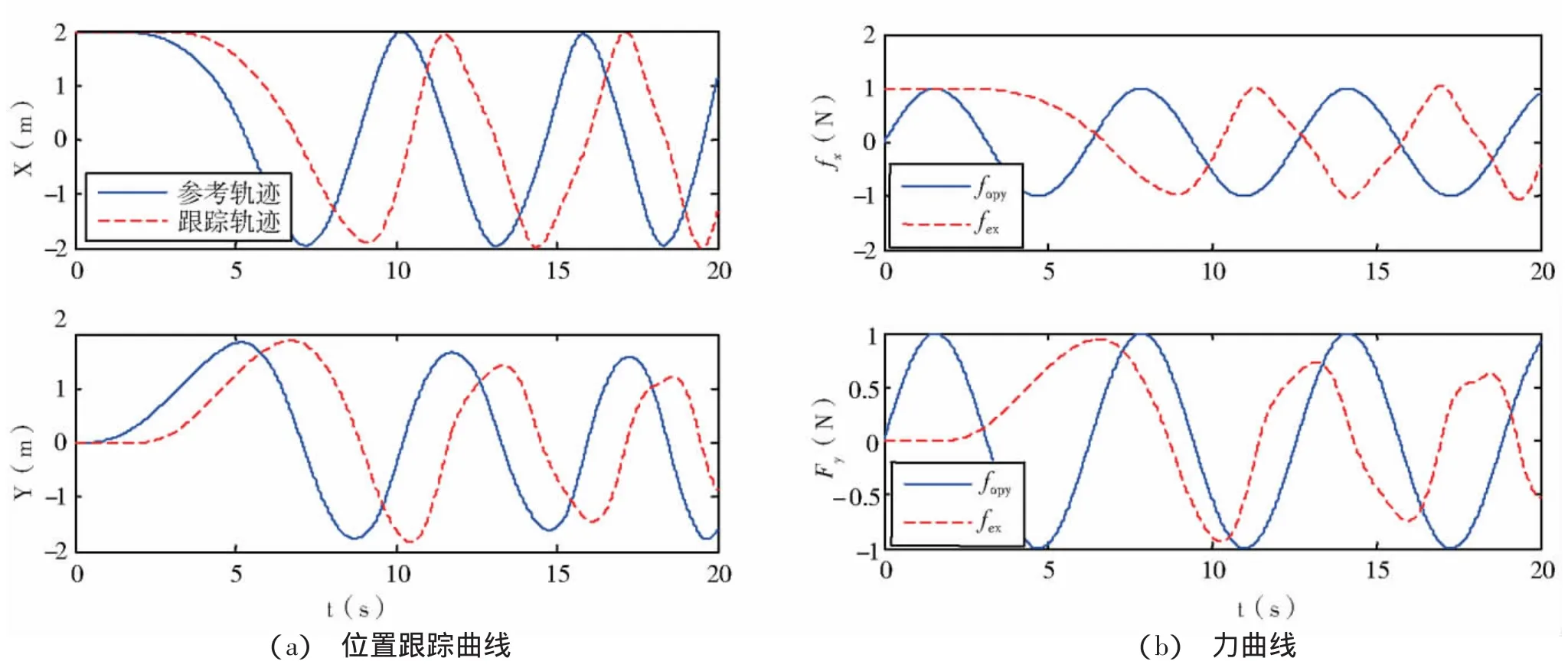
則已知樣本數據根據式(5)和(6)可以預測出下一時刻的時延。但是由于時延具有長程相關性,為了解決回歸自變量選擇問題,借鑒文[15]的方法,將給定的一個N維RTT時間序列,按滑動窗口大小為n構造一個數組Ri=[ri-n+1,ri-n+2,…,ri(i=n,n+1,…,N;n 其中,i-n+1≤p<q 這是一種短期預測(一步預測)方法,當獲得一個新時延數據,則將窗口向前移動一步,再利用前面的方法計算下一個時延。 主端和從端的n自由度機械臂動力學模型分別為: 式中,m、s分別表示主端和從端,qm(t)∈Rn和qs(t)∈Rn表示關節矢量,Dm(qm)和Ds(qs)表示機械臂的慣性矩陣,Cm(qm,q˙m),Cs(qs,q˙s)表示機械臂的哥氏力/向心力矢量,Gm(qm)和Gs(qs)表示機械手的重力矢量,Γh是操作者施加的轉矩,Γs是從端機械臂的控制輸入轉矩,Γe是從端機械臂與環境作用力的轉矩,Γed是Γe的延時。 選擇適當的A21,A22使得A是穩定的。 若定義一個轉矩輸入為 式中(x)是f(x)的估計值,τ是時延,Δu(t-τ)是控制輸入。則由(10)和(12)可得整個閉環控制系統為 式中表示函數的估計誤差 此時,機械臂控制系統在關節空間被線性化,其模型可以用下面的狀態方程表示 式中,w(t)是系統擾動,假設為零均值的白噪聲;y(t)是從端系統輸出;C表示機械臂系統輸入與輸出之間的關系矩陣,這里取C為2n*2n維單位陣。 對線性化后的機械臂模型(14)離散化處理,得 式中,Ad,Bd,Cd,Bwd分別對應于式(14)中的A,B,C,以及Bw經離散化后獲得的系數矩陣,d是時延,d=τ/Ts,Ts是采樣周期。 設在kT時刻,機械臂的優化性能指標為 系統期望的輸出響應采用如下形式 其中,ξ是操作者發出的參考輸入量。式中α值越小,系統魯棒性越強,但這是以降低響應速度為代價的。 由離散模型(15)可以得到以下方程[21] 由式(18)可知,y(k+j|k)不僅與已知的控制增量Δu(k-d),…,Δu(k-1)有關,還與未知的控制增量Δu(k),…,Δu(k+j-d-1)有關。因此y(k+j|k)的預測值為 其中 由(16),(17),(20)可得 根據式(15)可以計算出j步導前輸出y(k+j),由于這個導前輸出是根據系統真實模型參數推導出來,而實際控制器是根據理論模型參數(估計模型參數)設計的,系統真實模型參數與理論模型參數不完全匹配,存在模型誤差。設用理論模型參數計算的導前輸出為yˉ(k+j),則可以利用k時刻已知的模型輸出誤差(22)來修正。 其中,,(k+N1)分別為G,F(k+N1)的理論模型參數值;e(k)是k時刻的模型輸出誤差;h是誤差修正系數。根據優化性能指標(16),重新計算閉環控制策略可得 圖2 平面二連桿機械臂 不失一般性,主端和從端分別采用如圖2所示的平面二連桿機械臂。把機械臂的每條臂看作是質量集中在末端的剛體,其質量分別為m1=1kg,m2=1kg,長度為l1=1m,l2=1m,關節角為q1,q2,轉矩為 Г1,Г2。用MATLAB進行仿真,采樣周期Ts=0.1s,控制周期Tc=0.2s。選擇A21=diag{-1,-1},A22=diag{-2,-2},取N1=d+1,N2=N1+4,Nu=5,ρ=20*I(20),μ =10-5*I(10),其中I(i)表示i維單位陣。主從端機械臂初始狀態為q1=0rad,q2=0rad,操作者的x軸fhx(t)和y軸fhy(t)作用力分別為幅值 1N,頻率1Hz的正弦輸入。選取前向時延和反向時延分別為回路時延的一半。實際回路時延以及預測時延如圖3所示。預測時延的均值相對誤差為e=0.61%,落在μ=3σ范圍內的預測時延個數占總時延個數的99.97%。因此該預測方法能夠較精確的預測出遙操作回路時延。 圖3 實際時延和預測時延 當從端機械臂與環境無接觸,非線性誤差為5%時,采用本文提出的方法對大時延遙操作系統進行控制,獲得的位置和速度跟蹤曲線如圖4所示。從圖中可以看出,本文所提方法能夠使系統很好的實現位置和速度的跟蹤。 當從端機械臂和環境有接觸時,假設環境模型為:Fe=Kex(t)+Bex˙(t),令Ke=diag{0.5,0.5},Be=diag{0.1,0.1}。采用本文所提方法對其進行仿真,系統的位置跟蹤曲線以及人的操作力(fop)和從端和環境的作用力(fe)曲線如圖5所示。從圖中可以看出,在與環境接觸的情況下且時延抖動較劇烈時,本文所提的方法可以實現較好的位置和速度跟蹤。 時延問題是遙操作系統急需解決的重要問題之一。本文針對具有多自由度主從端的空間遙操作系統的大時延問題,提出了一種新的基于在線時延預測的GPC方法。主端的時延預測器能夠有效地預測出下一時刻的回路時延,從而能夠動態補償網絡的隨機時延;根據該預測時延采用基于狀態空間方法設計的GPC使得系統對于不同的時延具有較強的適應性。仿真結果表明,在時變大時延的情況下,無論從端和環境有無接觸,本文所提方法均可以使系統穩定,還可以獲得好的位置和速度跟蹤性能。未來的研究工作,主要是根據環境和主端的模型,采用GPC方法預測將來的從端參考軌跡,以實現無時延的位置跟蹤。◇ 圖4 非線性誤差5%從端與環境無接觸時的位置和速度曲線 圖5 非線性誤差5%從端與環境接觸時的位置和力曲線 [1]Burridge R R,Hambuchen K A.Using prediction to enhance remote robot supervision across time delay.IEEE/RSJ Int Con IROS,2009:5628-5634. [2]蔣再男,趙京東,劉宏.力反饋柔性虛擬夾具輔助遙操作.機器人,2011,33(6):685-690. [3]Nu?oa E,Basa?ez L,and Ortega R.Passivity-based control for bilateral teleoperation:A tutorial.Automatica,2011,47(3):485-495. [4]宋愛國,黃惟一.空間遙控作業系統的自適應無源控制.宇航學報,1997,18(3):26-32. [5] Lawn C A, Hannaford B.Performance testing ofpassive communication with time delay.IEEE Int Conf on Robotics and Automation,Atlanta,USA,1993:776-783. [6]Leung G M H,Francis B A.Bilateral controller for teleoperators with time delay via?-synthesis.IEEE Trans on Rob and Auto,1995,11(1):105-116. [7]Sadeghi M S,Momeni H R,and Amirifar R.H∞ and L1 control of a teleoperation system via LMIs.Applied Mathematics and Computation,2008,206:669-677. [8]Wang Y,Sun Z Q,and Chou W S.Robust controller design for teleoperation systems with time-varying delays.IntConfon Measuring Technology and Mechatronics Automation,2010:266-269. [9] Imaida T,Yokokohji Y,Doi T,et al.Groundspace bilateral teleoperation of ETS-VII robot arm by direct bilateral coupling under 7-s time delay condition.IEEE Transactions on Robotics and Automation,2004,20(3):499-511. [10] Sheng J,Spong M W.Model predictive control for bilateral teleoperation systems with time delays.Proc Can Conf Electr Comput Eng,Tampa,FL,2004,4:1877-1880. [11] Slama T,Aubry D,Vieyres P,et al.Delayed generalized predictive control of bilateral teleoperation systems.Proc 16th IFAC World Congr,2005:379-384. [12]Slama T,Aubry D,Oboe R,et al.Robust bilateral generalized predictive control for teleoperation systems.Con on Control and Automation,Mediterranean,2007:1-6. [13]Slama T,Trevisani A,Aubry D,et al.Experimental Analysis of an Internet-Based Bilateral Teleoperation System With Motion and Force Scaling Using a ModelPredictive Controller.IEEE Transactions on Industrial Electronics,2008,55 (9):3290-3299. [14]陳丹,席寧,王越超等.網絡遙操作系統中基于事件的預測控制策略,控制理論與應用,2010,27(5):623-626. [15]Chen D,Fu X,Ding W,et al.Shifted gamma distribution and long-range prediction of round trip time delay for Internet-based teleoperation. International Conference on Robotics and Biomimetics,Bangkok,Thailand,2009:1261-1266. [16]Bemporad A.Predictive control of teleoperated constrained systems with unbounded communication delays.Proc 37th IEEE Con on Decision Control,Tampa,Florida,U.S.A.,1998,2:2133-2138. [17]Yang Y,Li H.Kernel Based Nonlinear Regression for Internet Round Trip Time-delay Prediction.WCICA 2012. [18]Pijn J P M,Vijn P C M,Lopes da Silva F H,et al.The use of signal-analysis for the localization of an epileptogenic focus:a new approach.Advances in Epileptology,1989,17:272-276. [19]Taylor J S,Cristianini N.Kernel methods for pattern analysis.Cambridge University press,2004.[20]Huang J,Xu L,and Frank L L.Neural Network Smith Predictive Control for Telerobotics with Time Delay.Transactions of Nanjing University of Aeronautics&Astronautics,2001,18:35~40.[21] Tang B,Liu G,Gui W,et al.State-space model based generalized predictive control for networked control systems.17th IFAC World Congr,2008,PART 1.
4 GPC設計
4.1 遙操作系統的線性狀態空間模型






4.2 基于狀態空間模型的GPC設計




5 仿真結果
6 總結
 猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24當代工人(2020年8期)2020-05-25 09:07:38小溪流(畫刊)(2017年12期)2018-01-10 16:07:29光學精密工程(2016年6期)2016-11-07 09:07:19科技知識動漫(2016年8期)2016-07-29 20:40:09Coco薇(2016年2期)2016-03-22 02:42:52兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49Coco薇(2015年1期)2015-08-13 02:47:34
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24當代工人(2020年8期)2020-05-25 09:07:38小溪流(畫刊)(2017年12期)2018-01-10 16:07:29光學精密工程(2016年6期)2016-11-07 09:07:19科技知識動漫(2016年8期)2016-07-29 20:40:09Coco薇(2016年2期)2016-03-22 02:42:52兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49Coco薇(2015年1期)2015-08-13 02:47:34
