對接初始條件對捕獲概率的影響分析
2013-09-19 00:50:50鄭云青張崇峰
載人航天 2013年3期
鄭云青,張崇峰,劉 志,顧 靖
(1上海市空間飛行器機構重點實驗室,上海宇航系統工程研究所,上海201108;2上海航天技術研究院,上海201109)
1 引言
兩個航天器在空間進行交會對接時,可分為兩個階段:交會階段和對接階段。在兩航天器第一次機械接觸之前稱為交會階段,主要完成追蹤航天器與目標航天器的交會、接近,將兩航天器的相對位置、姿態和相對速度調整到對接初始條件范圍內。從兩航天器第一次機械接觸開始,關閉姿態控制系統,由對接機構機械系統完成碰撞連接、軸向捕獲、相互拉緊,直到兩航天器完成剛性連接連成一個整體,稱為對接階段[1]。
兩航天器對接時,由于敏感器測量誤差、控制系統精度所引起的動力學誤差以及測量裝置和對接機構的安裝誤差等相互疊加,其相對運動參數總是有偏差的[2],即兩航天器捕獲時,總是在一定的初始條件范圍內進行的。由于這種偏差的客觀存在,使航天器的交會與對接變得復雜了,也給對接機構的成功捕獲增加了難度。
對接機構有多種類型,如“錐-桿”式、“錐-栓”式、異體同構周邊式、數控式以及“十字型”布局小型卡爪式對接機構等[3,4]。這些對接機構的結構形式不同,但主要工作過程是一致的。本文以異體同構周邊式對接機構為例,根據GNC能夠實現的對接初始條件規律和范圍,提出了對接機構捕獲概率計算的方法,分析了對接初始條件的分布范圍和規律對捕獲概率的影響。
2 對接過程簡介
異體同構周邊式對接機構是按照雌雄同體的配合原則配置對接面的部件,所有對接面的部件都相對于同一軸成對地反對稱放置,即凸部對凹部、銷對套、主動對被動等,以保證兩對接機構之間的相容性,見圖1。根據這一原則設計的對接機構,主被動為一體,無須區分主被動部件,這樣可以保證一艘飛船可以與裝有相同對接機構的任意飛船對接。
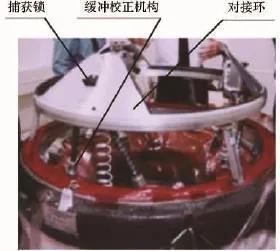
圖1 異體同構周邊式對接機構
異體同構周邊式對接機構由與捕獲緩沖有關的對接環、捕獲鎖、傳動緩沖機構以及與密封有關的連接密封機構等組成。對接機構的捕獲緩沖過程[5]見圖2。具體為:
①對接準備:對接前,將追蹤航天器對接機構的對接環推出到準備對接位置,并使對接環在位置和姿態上具有一定的柔性;
②接觸、緩沖:在對接初始條件范圍內,當兩對接機構第一次機械接觸時,追蹤航天器和目標航天器的對接環相互配合,利用自身的結構形狀進行初始導向,并通過傳動緩沖機構緩沖兩航天器間的碰撞;
③捕獲:當兩對接環端面重合時,追蹤航天器的捕獲鎖與目標航天器的擋塊咬合,實現捕獲;
④緩沖與校正:追蹤航天器的對接機構通過傳動緩沖機構對兩航天器間的相對運動進行緩沖,校正兩航天器間的姿態和位置偏差。
3 捕獲概率定義
3.1 對接初始條件及其分布函數
對接初始條件是在目標航天器對接面坐標系下描述。目標航天器對接面坐標系Od-XdYdZd如圖3所示,坐標系原點Od在目標航天器對接框端面中心,OdXd軸指向目標航天器后端。追蹤航天器對接面坐標系Oz-XzYzZz的坐標系原點Oz在追蹤航天器對接環環導向板根圓圓心,OzXz軸指向追蹤航天器前端。
對接初始條件是指兩航天器對接機構首次機械接觸時,追蹤航天器對接面坐標系與目標航天器對接面坐標系之間相對同軸位置偏差的相對坐標值(相對位移與相對轉角)及其一階導數(相對速度與相對角速度),即包括:
① 接近速度Vx;
② 橫向偏移量 ΔY、ΔZ;
③ 橫向速度Vy、Vz;
④ 橫向角偏移量Ψ、θ;
⑤滾轉角偏移量φ;
⑥ 橫向角速度 ωΨ、ωθ;
⑦ 滾轉角速度ωφ。
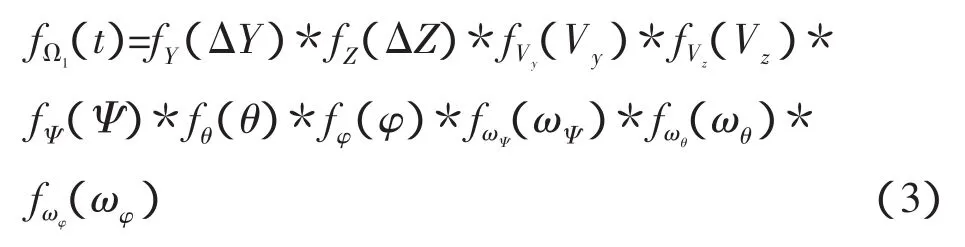
對接初始條件由航天器的姿態控制系統實現,其分布密度函數為:

初始條件的各自由度是相互獨立的。在任一對接工況下,對接初始條件是由上述初始條件參數隨機抽樣組合形成的。根據相互獨立的多維隨機變量的特性[6],存在:

圖2 對接機構的捕獲緩沖過程
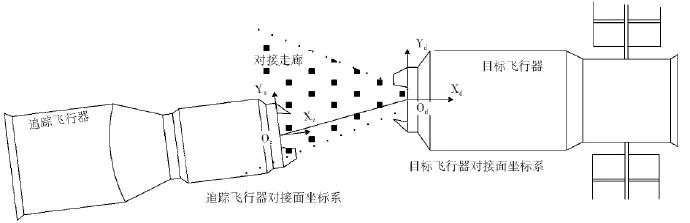
圖3 對接坐標系
令
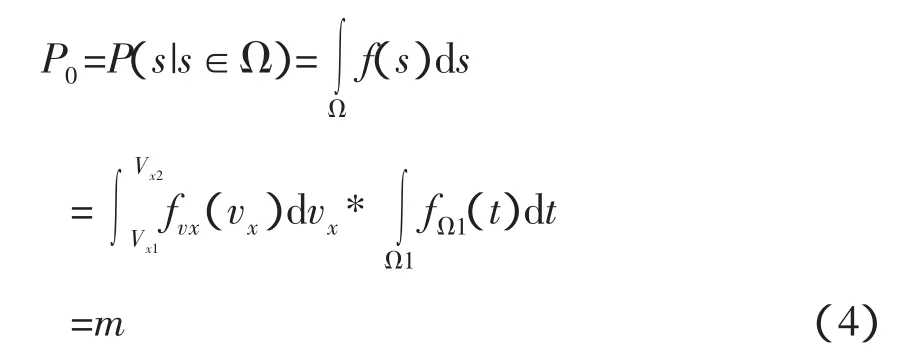
f(s)的定義域為航天器姿態控制系統實現的對接初始條件范圍,記為Ω。Ω1為除Vx外其它自由度形成的初始條件范圍,稱為對接初始條件偏差。在定義域Ω內,隨機變量s的累積概率值為:
3.2 捕獲概率
捕獲概率是指在對接初始條件范圍內,追蹤航天器對接機構與目標航天器對接機構能夠捕獲成功的概率。
由于初始條件的不同,雖然對接機構的工作是正常的,兩航天器仍然可能捕獲失敗;若改變對接的初始條件,則兩航天器就能捕獲成功。因此,捕獲概率僅與對接初始條件范圍和對接機構捕獲緩沖能力有關,而與對接機構的可靠性無關。
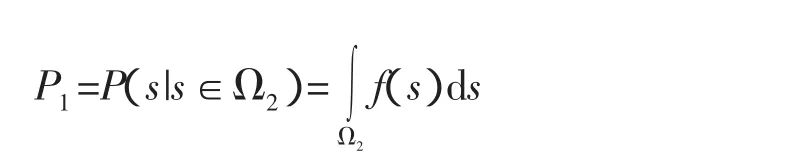
在對接機構正常工作情況下,某次具體對接初始條件工況下的捕獲試驗,只存在兩種結果,即捕獲成功或捕獲失敗。因此,在一定的對接初始條件范圍Ω2內,對接機構能夠捕獲;超出此范圍,則不能捕獲。
在兩航天器接近對接時,為了保證捕獲緩沖的順利進行,兩對接航天器的對接環可以按照六個自由度逐漸靠近,直到重合在一起,實現兩環同軸,并在重合時完成捕獲。
在對接捕獲過程中,必須具有足夠的能量將捕獲鎖的鎖舌壓入到導向板錐面下,之后,捕獲鎖鎖舌迅速彈出,與目標航天器的擋塊嚙合,從而實現兩航天器的捕獲,如圖4所示。因此,兩航天器應具有一定的沿X軸的縱向接近速度,且必須保證縱向速度的下限,即:
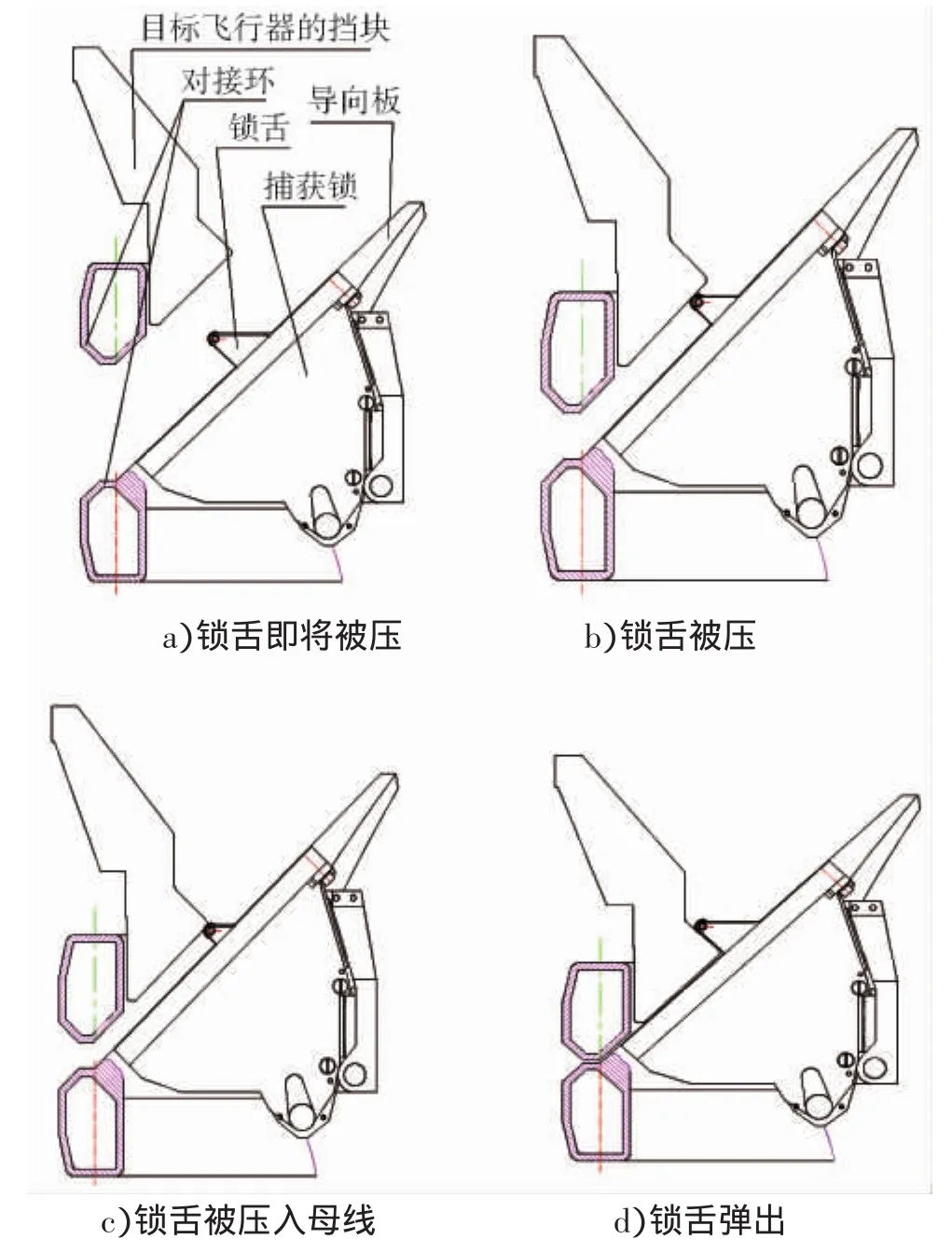
圖4 捕獲鎖鎖舌壓入過程示意圖

實際上,在捕獲之前,部分能量要消耗在由對接初始條件偏差引起的撞擊上,導致捕獲時航天器的接近速度Vx與開始相比減小了。任意對接初始條件偏差下的最小捕獲速度Vxmin是由產生捕獲鎖鎖舌壓入力的縱向速度和對接初始條件偏差決定的,且Vxmin隨著對接初始條件偏差的增大而增大,即:

在對接初始條件范圍Ω內,對接機構能夠捕獲的范圍為:

對接機構能夠捕獲的累積概率值為:
根據捕獲概率的定義,在對接初始條件分布范圍Ω內,對接機構的捕獲概率為:
4 對接初始條件分布規律對捕獲概率的影響
根據仿真分析,在對接過程中,兩航天器的橫向偏差對最小縱向接近速度影響較大。為了了解初始條件對捕獲概率的影響,以兩航天器對接過程中只存在橫向Y、Z向偏差,其它的對接初始條件偏差均無偏差為例進行計算,其中Vx的范圍是[Vx1,Vx2],橫向的對接最大偏差為±R,其中:

假設對接機構能夠捕獲的最小縱向接近速度Vxmin隨著R2的增大線性增加,即

式中Cr:為Vxmin的線性增大系數。
4.1 對接初始條件分布規律與捕獲概率的關系
對接初始條件的分布分以下幾種情況:
①Y、Z的偏差和Vx的分布都服從正態分布,都在3σ范圍內,此時:
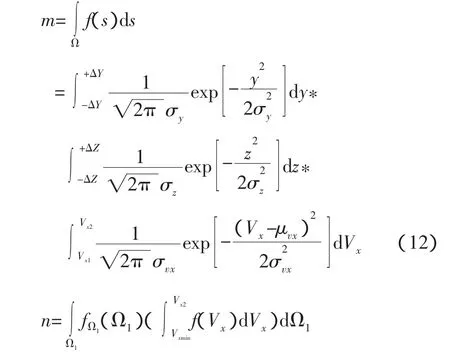
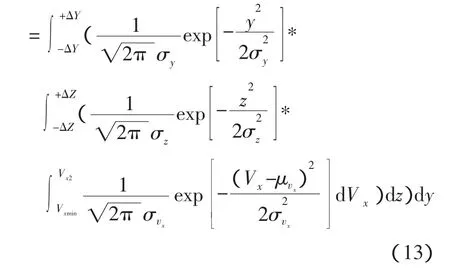
式中:σy=ΔY/3
σz=ΔZ/3
σvx=(Vx2-Vx1)/6
μvx=(Vx2-Vx1)/2
②Y、Z的偏差服從正態分布,在3σ范圍內;Vx的分布服從對數正態分布,log(Vx)在3σ范圍內,此時:
式中:σy=ΔY/3
σz=ΔZ/3
σvx=[log(Vx2)-log(Vx1)]/6
μvx=[log(Vx2)+log(Vx1)]/2
③Y、Z的偏差都服從正態分布,Vx的分布服從均勻分布,此時:

式中:σy=ΔY/3
σz=ΔZ/3
4.2 對接初始條件分布規律對捕獲概率的影響
根據上述公式(9)~(17),通過改變對接初始條件,可以得到捕獲概率隨對接初始條件的變化規律。
以下算例中,Vx、R、Vxmin和CR取值如下:
Vx∈[0,0.35](m/s)
R∈[0,0.2](m)
Vxmin=0.04(m/s)
CR=2
橫向偏差對捕獲概率的影響見圖5。
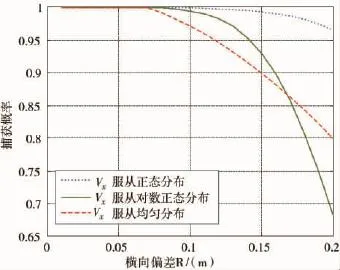
圖5 捕獲概率隨橫向偏差R的變化
由圖5可知,隨著最大橫向偏差的逐漸增大,捕獲概率逐漸減小。當最大橫向偏差在一定范圍內時,捕獲概率為1,此時,最大橫向偏差時能夠捕獲的最小縱向接近小于Vx1。
在最大橫向偏差一定的情況下,捕獲概率隨著縱向接近速度Vx的分布規律變化而有所不同。若Vx服從正態分布,捕獲概率最大,且最大橫向偏差的變化對捕獲概率的影響最小;若Vx服從對數正態分布,隨著最大橫向偏差的逐漸增大,捕獲概率迅速減小;若Vx服從均勻分布,捕獲概率隨著最大橫向偏差的逐漸增大呈線性減小。
縱向接近速度的下限值Vx1對捕獲概率也有影響,見圖6。在最大橫向偏差不變時,提高兩航天器縱向接近速度的下限值,就會提高捕獲概率。縱向接近速度服從對數正態分布時,增大縱向接近速度的下限值,可以大幅度地提高捕獲概率值。
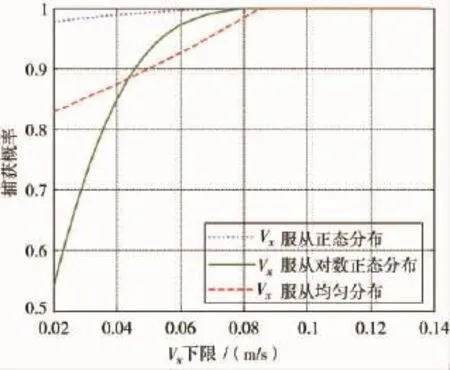
圖6 捕獲概率隨Vx下限的變化
若保持縱向接近速度的范圍不變,提高縱向速度的中間值,也可以提高捕獲概率,見圖7。
在最大橫向偏差一定的情況下,對于不同的,捕獲概率也不同。圖8為V服從不同分布規x律時,捕獲概率隨的變化。
當增大時,捕獲概率減小。若Vx服從正態分布,捕獲概率最大,且的變化對捕獲概率的影響最小;若Vx服從對數正態分布,隨著的逐漸增大,捕獲概率迅速減小;若Vx服從均勻分布,捕獲概率隨著的逐漸增大呈線性減小。
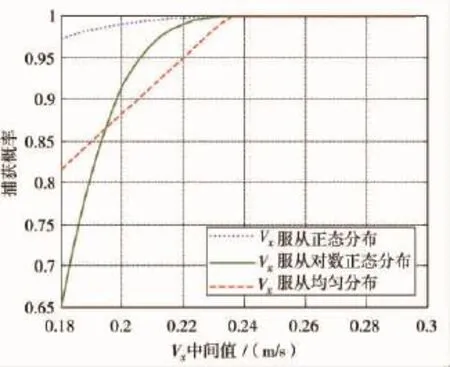
圖7 捕獲概率隨Vx中間值的變化
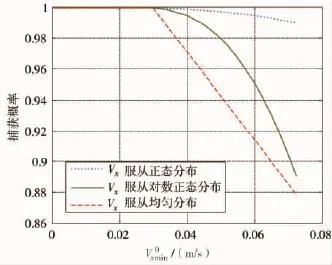
圖8 捕獲概率隨的變化
為確保捕獲易于實現,兩航天器對接時,需要啟動追蹤航天器的正推發動機,從而減小縱向速度的下限值,提高兩航天器的捕獲成功概率。
縱向接近速度的上限值Vx2對捕獲概率也有影響,見圖9。在最大橫向偏差不變時,增大兩航天器縱向接近速度的上限值,也會提高捕獲概率。若其它條件一樣,縱向接近速度服從正態分布時,捕獲概率最大。
由于受對接機構的結構尺寸、重量以及航天器對對接過程中的過載等限制,決定了縱向速度的上限值必須在一個合理的范圍內,即縱向速度的上限值不能超過對接機構設計的允許值。
綜上表明,要提高捕獲概率,應采取以下措施:
a.盡量降低兩航天器對接時的初始條件偏差;
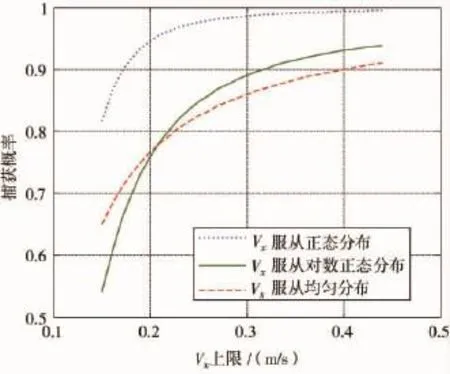
圖9 捕獲概率隨Vx上限的變化
b.提高兩航天器間的縱向接近速度;
c.優化縱向接近速度的實現方案,盡量使縱向接近速度的分布規律服從正態分布。
對接時,若還存在其它方向的初始條件偏差,其對捕獲概率的影響規律趨勢與橫向偏差對捕獲概率的影響是一致的,在此不再贅述。
5 結論
本文根據對接初始條件分布函數以及對接機構對接捕獲的實現方案,建立了捕獲概率的計算模型,重點研究了橫向偏差和縱向接近速度對捕獲概率的影響規律,分析了對接初始條件分布范圍及其規律對捕獲概率的影響,確定了提高捕獲成功概率的方向,可供工程研制參考。而對接時存在多個方向的初始條件偏差及偏差組合,實際的捕獲概率模型將更為復雜。◇
[1]婁漢文,曲廣吉,劉濟生等譯.空間對接機構[M].北京:航空工業出版社,1992,1.
[2]朱仁璋.航天器交會對接技術[M].北京:國防工業出版社,2007.
[3]張崇峰,覃黎洋.空間對接與空間站[J].科學,2012,01.
[4]張崇峰.空間對接機構綜述[J].世界科學,2003,01.
[5]陳寶東,鄭云青,邵濟明等;對接機構分系統研制[J].上海航天,2011,06.
[6]盛驟,謝式千,潘承毅.概率論與數理統計[M].第2版.北京:高等教育出版社,1989,81.