人體胃腸道生理參數無創檢測系統及試驗研究
2013-09-19 00:50:56顏國正王志武姜萍萍
載人航天 2013年3期
趙 凱,顏國正,王志武,姜萍萍,劉 華
(上海交通大學電子信息與電氣工程學院,上海200240)
1 引言
隨載人航天任務的發展,航天員的在軌時間越來越長,為航天員提供高質量的醫監醫保,也將面對更多的航天醫學問題。航天員胃腸道正常的消化、吸收及調節功能是維持生命、抗御疾病、提供最佳工作效率的前提。當前所掌握的人體胃腸道消化、吸收及調節功能,是在特定的地球表面引力場、地理、地質、氣象、水文、生態以及諸多地表因素綜合影響下獲得和發展起來的。空間環境下胃腸功能的研究目前較為初步。
研究表明:失重條件下,進食后的胃排空不同于地面情況,胃排空時間、腸內轉運時間等生理因素將發生改變。應激條件下,航天員胃運動幅度顯著提高,頻率加快。胃電是航天運動病惡心癥狀將要發生的早發性敏感指標,而胃電活動所致的胃平滑肌機械運動必然反映在胃內壓力、胃蠕動波節律變化等方面。
研究太空環境下胃腸功能及空間環境人體胃腸功能的影響,首先必須解決該環境下胃腸道運動生理參數的無創、長時間檢測問題。對此,美國率先開展了相關研究,典型的工作有:美國國家航空航天局Goddard太空飛行中心、美國約翰霍普金斯大學、美國國家航空航天局的噴氣推進實驗室(JPL)、美國國家航空航天局(NASA)AMES研究中心研制的“吞服式胃腸道內溫度監測系統(ITMS)”、“吞服式胃腸道內溫度、pH值檢測系統”和“可吞服響應式藥物釋放系統”,相關研究結果促進和推動了美國載人航天事業的發展。
在國內,一些從事航天醫學研究的單位在航天器內環境和設備的評價方面開展了大量工作,并制訂了飛船乘員艙氣體環境醫學要求、艙室溫度環境和個人防護裝備的醫學要求等多項國家軍用標準。但在空間環境下,對人體生理狀態及生理功能的系統性研究尚待加強。因此,研究上述問題,對于實施高質量的醫監醫保、全面掌握航天員的整體健康狀況具有十分重要的意義。
2 人體胃腸道生理參數無創檢測系統組成與工作原理
人體胃腸道生理參數無創檢測系統由微型電子膠囊、便攜式數據記錄儀和數據處理系統三個部分組成。系統整體結構如圖1所示。
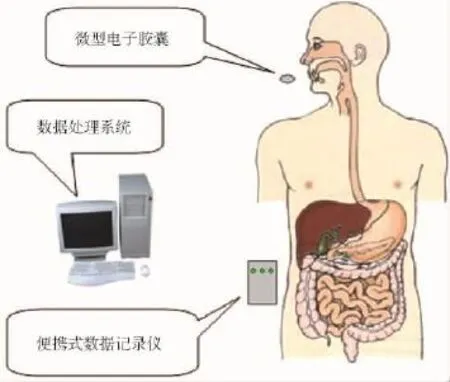
圖1 系統整體結構
檢測過程中,微型電子膠囊從口腔服入、經肛門排出,整個檢測過程無痛苦、無創傷、無需清腸及禁食。微型電子膠囊能在人體胃腸道正常生理狀態的情況下,24h監測胃腸道內壓力、溫度、pH值等生理參數。便攜式數據記錄儀對微型電子膠囊發射的數據實現可靠接收和存儲。數據處理系統可對便攜式數據記錄儀存儲的數據進行一系列處理,以便獲得人體胃腸道內的溫度、壓力和pH值等生理參數,為進一步的診斷提供依據。
2.1 微型電子膠囊
微型電子膠囊由微傳感模塊(包括微型壓力傳感器模塊、微型溫度傳感器模塊和微型pH值傳感器模塊)、射頻發射器模塊、數據處理模塊、電源管理模塊、電池組模塊等部分組成,所有電路密封在外殼內,如圖2所示。
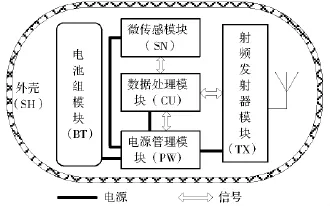
圖2 微型電子膠囊內部結構
微傳感模塊由傳感器和相應的信號調理電路組成,將信號調理電流與傳感器設計在一個模塊內的原因是為了增加各模塊的獨立性,提高設計的靈活性。微型數據無線發射模塊研制過程中,首先必須確定載波頻率,頻率點的選擇應使射頻通訊模塊的輻射效率較高、電流消耗較小,考慮到無線通訊頻率的使用許可,該模塊采用ISM(Industrial Scientific Medical)波段內的433.92MHz作為射頻通訊的載波頻率。電源模塊由紐扣電池組和電源管理模塊組成,由于小體積電池能量非常有限,為此,利用系統工作的時空不均衡性,即在實際應用中對有效功耗和無效功耗進行時間域和空間域的劃分的方法來設計和運用電源管理模塊。研制的微型電子膠囊的外形尺寸為φ11×26mm,質量4.5g。其外形如圖3所示,主要性能指標如下:溫度測量范圍為34℃~42℃,測量誤差為±0.25℃,分辨率為0.01℃;壓力測量范圍為70kPa~150kPa,測量誤差為±1.5kPa,分辨率為0.1kPa;pH 值測量范圍為 1~11,測量誤差為±0.5,分辨率為0.1。

圖3 微型電子膠囊外觀
2.2 便攜式數據記錄儀
便攜式數據記錄儀用于接收微型電子膠囊發送的數據,并進行存儲。其硬件包括射頻接收器模塊、實時時鐘模塊、數據存儲模塊、數據處理模塊、電源管理模塊、人機接口模塊和電池組,如圖4所示。
2.3 數據處理系統
數據處理軟件的功能包括:數據輸入接口、數據存儲與查詢、數據分析與處理、結果顯示與輸出、圖形用戶界面。通過數據處理系統對檢測數據的分析,便可以獲得人體胃腸道各段的收縮壓、靜息壓、靜息期總時間、每分鐘收縮頻率,胃腸道各段的溫度值,pH值等表征胃腸功能的生理參數。
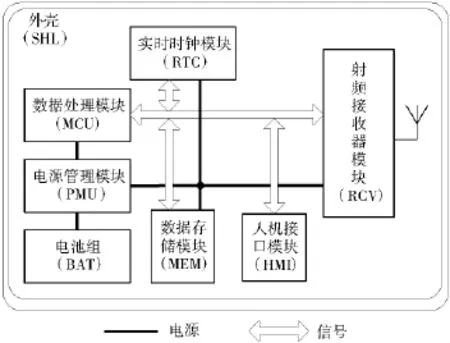
圖4 便攜式數據記錄儀原理框圖
3 人體胃腸道生理參數無創檢測系統環境試驗
為保證人體胃腸道生理參數無創檢測系統在太空環境中性能可靠,按照《交會對接任務醫監及醫學實驗設備分系統初樣環境試驗大綱》中的要求,對系統進行了一系列環境試驗。主要試驗內容見表1。
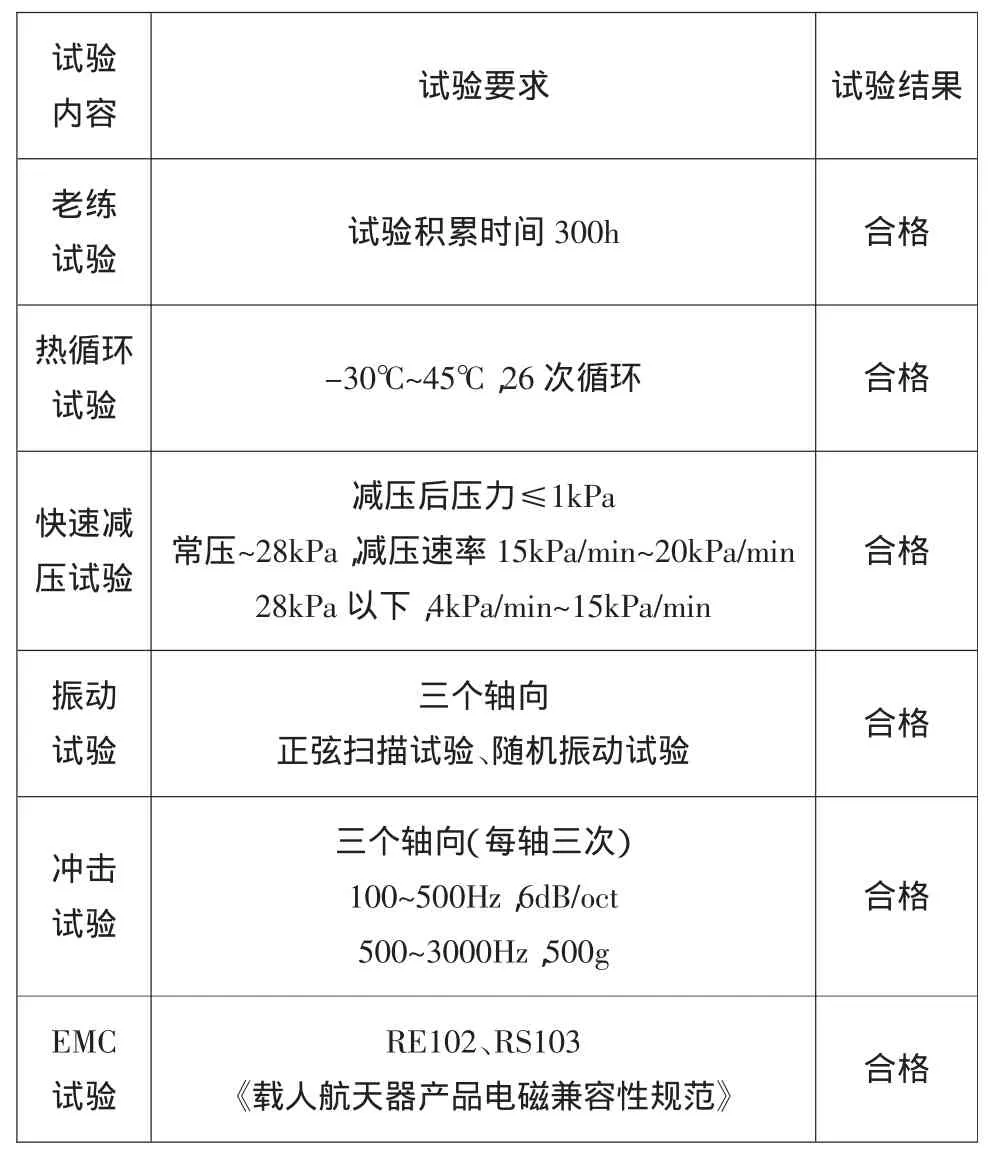
表1 人體胃腸道生理參數無創檢測系統環境試驗
環境試驗由中國航天電子技術研究院五三九廠、中國航空工業華東電磁兼容監督檢測中心、中國電子科技集團第三十二所質量部檢測中心等單位完成。
4 人體胃腸道生理參數無創檢測系統的臨床實驗
“人體胃腸道生理參數無創檢測系統”在上海市新華醫院、仁濟醫院和浦東新區人民醫院進行了一系列臨床驗證試驗。圖5為一受試者全消化道生理參數檢測數據曲線。
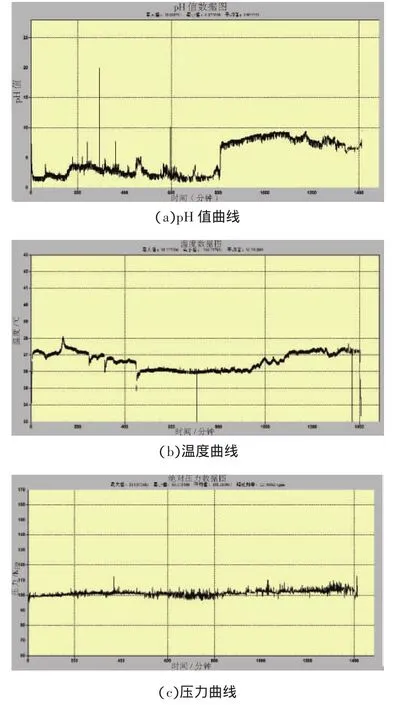
圖5 受試者全消化道生理參數檢測結果
4.1 生理參數檢測數據野值的剔除
在消化道生理參數采集過程中,由于干擾的存在,將產生不代表信號信息的數據,即野值,主要表現為:(1)接受到的數據格式錯誤。(2)數據不連續或負荷毛刺,這類野值可能是由于消化道局部緊張性排異性收縮引起,它們的存在會使功率譜產生偏離,或產生虛假的頻率成分,因此,處理過程應對其予以剔除。
本文野值的剔除方法采用探測插值法(probing interpolation method),其基本原理如圖6所示,圖中()2是先將數據平滑再平方,()是先將數據平方再平滑,其目的是產生一個不斷更新的樣本方差,然后探測下一個數據點xi+1,如果下一個數據點滿足,(K 為比例系數)關系式,則該數據認為不是野點;如果不滿足則采用線性外插法剔除該偽點;偽點代替公式為=xi+(xi-xi-1)。
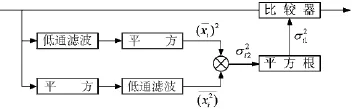
圖6 野值剔除原理圖
4.2 數據的平滑
實際采集到的人體消化道生理信號,必然會摻雜著噪聲信號-誤差,如系統誤差和隨機誤差。考慮到消化道收縮,如時相性節律性收縮、巨大移行性收縮等,收縮幅度較大,噪聲對采集到的生理信號影響較小,可以不對其進行平滑處理。而當胃腸道處于相對靜止期,如移動運動復合波(migrating motor complex,MMC)的I相,噪聲影響較大,必須予以處理,即需要在局部范圍內消除誤差。這里采用五點加權平均平滑法(即53H法)。
53H法是由Tukey提出,其基本思想是產生一個曲線的平滑估計,然后把它從數據中減掉。該方案利用“中位數”是均值的魯棒(robust)估計這個事實,假定測得數據為{x(i)},i=1,2,…,n,53H 法信號處理步驟為:
① 從{x(i)}構造一個新序列{y(i)},其方法是取x(1),x(2),…,x(5)的中位數作為y(3),然后舍去x(1)加入x(6)取中位數得y(4),依次類推,直到加入最后一個數據。換言之,總是在相鄰5個數據中擇取中位數,顯然,{y(i)}的項數比原{x(i)}項數少 4項。處理方法可為:

②用類似的方法在{y(i)}的相鄰的3個數據中擇取中位數構成序列{z(i)}。
③最后由序列{z(i)}按如下方式構成序列u(i):

為驗證信號平滑處理后的效果,截取部分原始數據經行數據平滑處理,如圖7所示。和原數據信號相比,平滑后的數據信號去除了原數據中的干擾信號,使得數據信號更清晰。

圖7 原數據信號與平滑后數據信號對比
對檢測數據通過野值的剔除和平滑后,采用數據處理方法對檢測數據進行分析和處理,得到了如下初步結果:提出了基于概率神經網絡的遺傳算法搜索最優特征子集的方法,獲得了表征結腸活動的最優特征組合;提出了基于小波和小波包變換的對角切片譜平方相位耦合方法,得到了胃活動平方相位耦合關系;基于自相關分析、重標極差分析、功率譜分析和消除趨勢波動分析方法,獲得了正常結腸壓力活動呈現復雜的冪律長程相關特性的結論。
④基于非線性混沌理論和分形分析方法研究了結腸活動,揭示正常結腸活動的混沌特征和分形維數。上述研究結果將為胃腸道生理過程研究提供參考。
5 結論
“胃腸道生理參數無創檢測系統”體現了正常生理狀態下對人體胃腸道生理參數的無創、實時和連續檢測的設計思想和要求,通過對不同環境下人體胃腸道生理參數的檢測可開展人體胃腸道功能建模研究、胃腸道功能評價及胃腸道疾病的預警。進一步對空間環境下人體胃腸道生理參數的檢測,可進行空間環境對人體胃腸功能的影響研究,為空間環境下航天員健康評價和高質量的醫監和監保提供全新的方法和手段。◇
[1]嚴榮國.人體消化道生理信號無創檢測技術及其非線性動力學分析.上海交通大學博士學位論文,2006(4).
[2]Mc Caffrey C.,Chevalerias O.,O’Mathuna C.,et al.,Swallowablecapsule technology.Ieee Pervasive Computing,2008.7(1):23-29.
[3] Li,H.Yan,G.,A portable method for assessing gastrointestinal motility by simultaneously measuring transit time and contraction frequency,JOURNAL OF MEDICAL ENGINEERING AND TECHNOLOGY,2008,VOL 32;NUMBER 6,pages 448-455.
[4]LI Hong-wei YAN Guo-zheng JIANG Ping-ping,Accuracy and Electromagnetic Safety Evaluation of a Portable Electromagnetic Localization System for Micro Invasive Medical Devices in Vivo,JOURNAL OF DONGHUA UNIVERSITY,2009,26(2).
[5]Van Gossum,A.and Ibrahim,M.,Video capsule endoscopy:what is the future Gastroenterol.Clin.North Am.2010,39 807-26.
[6]Carpi,F.,Magnetic capsule endoscopy:The future is around the corner.Expert Rev.Med.Devices,2010,vol.7,pp.161-164.
[7]劉洪英,李曉華,皮喜田等.消化道生理參數檢測膠囊系統的研究進展[J].2011,30(12),1-7.
[8] Jia Zhiwei,Yan GZ.Efficiency optimization of wireless power transmission systems for active capsule endoscopes.Physiological Measurement,32,2011,1561-1573.
[9] The SmartPill Wireless Motility Capsule.[EB/OL].2011.http://www.smartpillcorp.com.
[10]Liu Horrgying,Wang Gang,Wei Kang,et a1.An intelligent electronic capsule system for automated detection of gastrointestinal bleeding [J].Journal of Zhejiang University:Science B,2010,11(12):937-943.
[11]YAN RG,YAN GZ,ZHANG WQ,et al.Detecting phase coupling of gastric interdigestive pressure activity via diagonal slice spectra[C]//IEEE-EMBS.Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference.Shanghai,2005.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02