左心室轉(zhuǎn)子多路測試與控制系統(tǒng)
2013-09-26 03:47:14蔡玉文周建萍劉曉軍
電子設(shè)計(jì)工程 2013年24期
夏 甜 ,蔡玉文,周建萍,楊 云 ,劉曉軍
(中南民族大學(xué) 生 物醫(yī)學(xué)工程學(xué)院,湖北 武 漢430074)
電渦流位移傳感器系統(tǒng)廣泛應(yīng)用于電力、石油、化工、冶金等行業(yè)和一些科研單位。對汽輪機(jī)、水輪機(jī)、鼓風(fēng)機(jī)、壓縮機(jī)、空分機(jī)、齒輪箱、大型冷卻泵等大型旋轉(zhuǎn)機(jī)械軸的徑向振動(dòng)、軸向位移、鍵相器、軸轉(zhuǎn)速、脹差、偏心、以及轉(zhuǎn)子動(dòng)力學(xué)研究和零件尺寸檢驗(yàn)等進(jìn)行在線測量和保護(hù)。可以看出電渦流傳感器系統(tǒng)在生物醫(yī)學(xué)方面是一篇空白,而二十一世紀(jì),健康顯得尤為重要,在這樣的前提下,我們把目光投向了生物醫(yī)學(xué)工程方面。
此次選題是希望通過電渦流傳感器來對被物體的位置進(jìn)行精確的測量和監(jiān)控,將其推廣到醫(yī)學(xué)領(lǐng)域,精確快速測量人工心臟心室微小變化,對人工心臟進(jìn)一步研究起到了促進(jìn)作用,具有很深遠(yuǎn)的意義。
同時(shí)此次研究的內(nèi)容與本專業(yè)很相關(guān),可以將所學(xué)的理論知識(shí)應(yīng)用于實(shí)踐,學(xué)以致用,提高自身的科學(xué)素養(yǎng)。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
左心室轉(zhuǎn)子位移多路測試系統(tǒng)是一種由4個(gè)部分構(gòu)成的系統(tǒng),包括電渦流傳感器多路數(shù)據(jù)采集,A/D轉(zhuǎn)換,DSP控制器,12864液晶顯示.主要是通過電渦流傳感器采集信號(hào),利用A/D轉(zhuǎn)換器采集人工心臟泵轉(zhuǎn)子位移信號(hào),再通過PID設(shè)計(jì)實(shí)現(xiàn)對系統(tǒng)的控制,將多路采集的數(shù)據(jù)在12864液晶顯示屏上直觀的顯示出來。
設(shè)計(jì)方案如圖1所示。
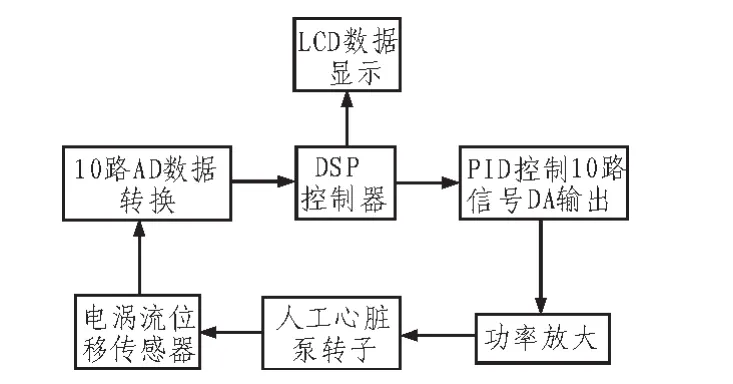
圖1 左心室轉(zhuǎn)子位移多路測試系統(tǒng)Fig.1 Multi-channel test system of left ventricular rotor displacement
2 轉(zhuǎn)子位移檢測
轉(zhuǎn)子的位移實(shí)時(shí)檢測是使用電渦流位移傳感器;電渦流位移傳感器能靜態(tài)和動(dòng)態(tài)地非接觸、高線性度、高分辨力地測量被測金屬導(dǎo)體距探頭表面距離;能準(zhǔn)確測量被測體(必須是金屬導(dǎo)體)與探頭端面之間靜態(tài)和動(dòng)態(tài)的相對位移變化。電渦流位移傳感器工作過程為當(dāng)被測金屬與探頭之間的距離發(fā)生變化時(shí),探頭中線圈的Q值也發(fā)生變化,Q值的變化引起振蕩電壓幅度的變化,而這個(gè)隨距離變化的振蕩電壓經(jīng)過檢波、濾波、線性補(bǔ)償、放大歸一處理轉(zhuǎn)化成電壓變化,最終完成機(jī)械位移轉(zhuǎn)換成電壓。
3 電壓AD轉(zhuǎn)換
傳感器測到的電壓要經(jīng)過AD轉(zhuǎn)換成數(shù)字信號(hào)才能進(jìn)行后處理。而本文采用的是DSPF2812[1]內(nèi)部的自帶的16路的12位分辨率、具有流水線結(jié)構(gòu)的AD,這樣可以減少成本和PCB布線,其結(jié)構(gòu)框圖如圖2所示。
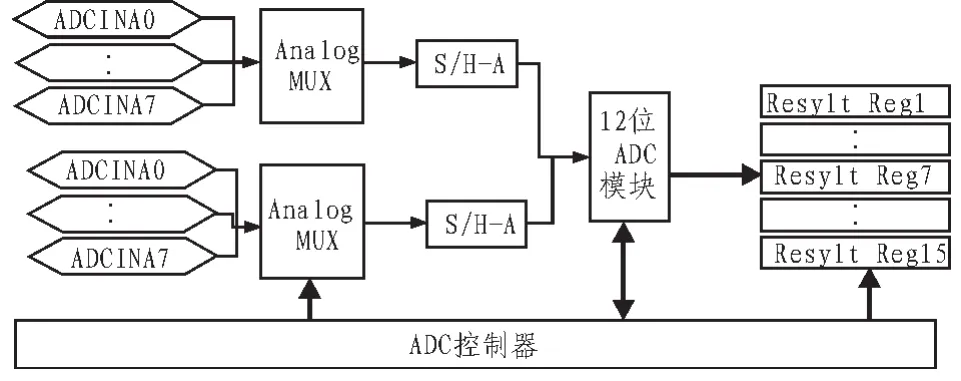
圖2 電壓AD轉(zhuǎn)換Fig.2 ADC of voltage
為了保險(xiǎn)起見,在輸入的電壓進(jìn)DSP[2]的AD口時(shí),加入一個(gè)如圖3的鉗位電路[3]。當(dāng)輸入的電壓超過3.3 V時(shí),二極管D1導(dǎo)通,ADC輸入引腳上的電壓為3.3 V;當(dāng)輸入電壓為負(fù)值時(shí),二極管D2導(dǎo)通,ADC輸入引腳的電壓為0;這樣就能是ADC輸入引腳上的電壓穩(wěn)定在0~3.3 V,從而保護(hù)ADC輸入的端口。

圖3 鉗位電路Fig.3 Circuit of clamping diode
4 PID控制算法與LCD顯示

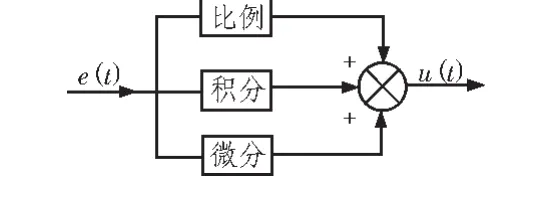
圖4 PID閉環(huán)控制系統(tǒng)Fig.4 Closed loop control system of PID
本控制系統(tǒng)采用PID位置式控制算法[5],其流程圖如圖5所示。
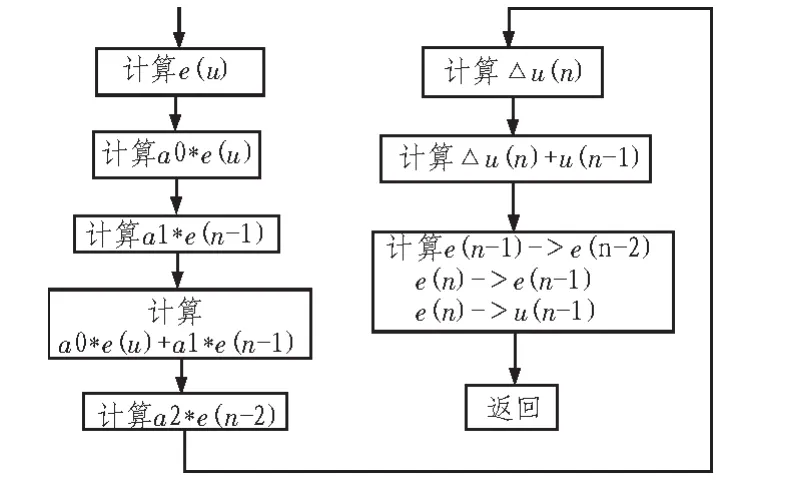
圖5 PID位置式控制算法Fig.5 Position type PID control algorithm
5 控制量DA輸出與功率放大
PID[6]控制算法計(jì)算出來的數(shù)值通過DA輸出來控制功率管來驅(qū)動(dòng)轉(zhuǎn)子轉(zhuǎn)動(dòng)。為了實(shí)現(xiàn)多路DA,則采用帶有SPI接口的12位4路DA輸出芯片max5253,只要使用3片芯片就能實(shí)現(xiàn)10路DA的輸出。為了提高DA的驅(qū)動(dòng)能力,則在后加上甲乙類功率放大。
6 實(shí)驗(yàn)結(jié)果
1)單個(gè)傳感器測量轉(zhuǎn)子徑向位移示意圖如圖6所示。
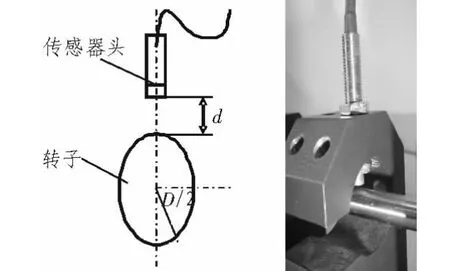
圖6 單個(gè)傳感器測量轉(zhuǎn)子徑向位移示意圖Fig.6 Diagram of a single sensor rotor radial displacement
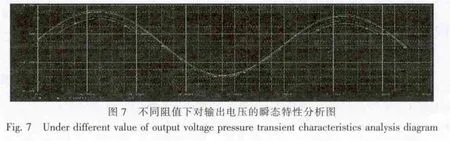
2)功率放大器的仿真如圖7所示。
3)單個(gè)傳感器測量數(shù)據(jù)如表1~3所示。
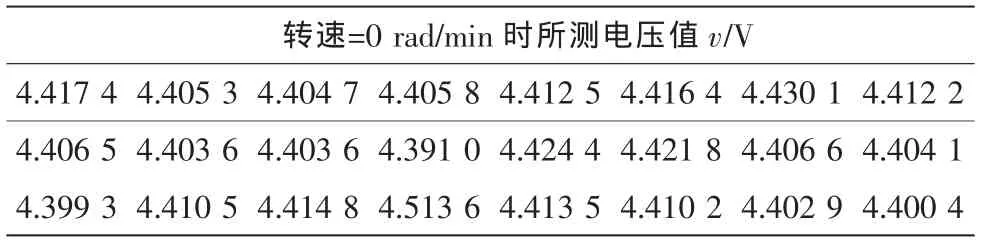
表1 轉(zhuǎn)速為0rad/min時(shí)所測電壓值Tab.1 Speed of 0 rad/min when the measured voltage value
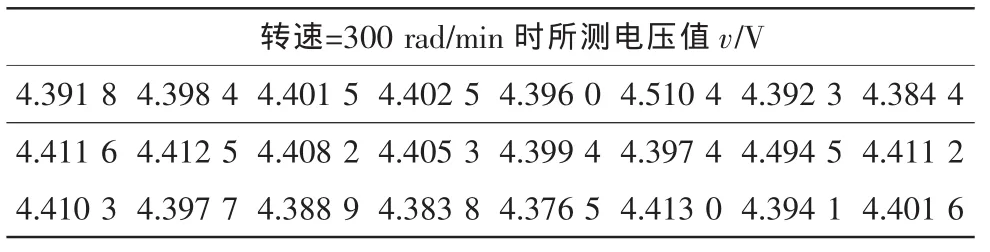
表2 轉(zhuǎn)速為300rad/min時(shí)所測電壓值Tab.2 Speed of 300 rad/min when the measured voltage value
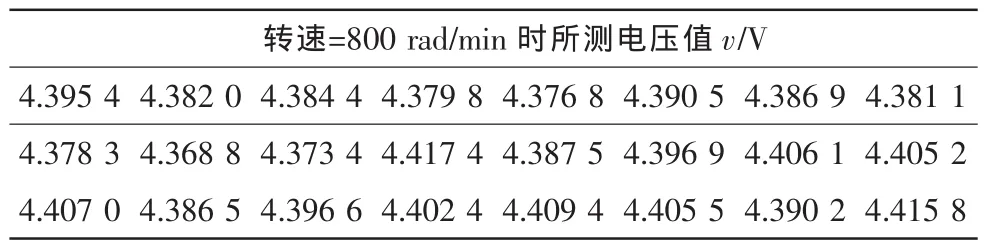
表3 轉(zhuǎn)速為800rad/min時(shí)所測電壓值Tab.3 Speed of 800 rad/min when the measured voltage value
4)單個(gè)傳感器測量數(shù)據(jù)分析如表4所示。
5)不同通道數(shù)據(jù)采樣的處理如圖8所示。
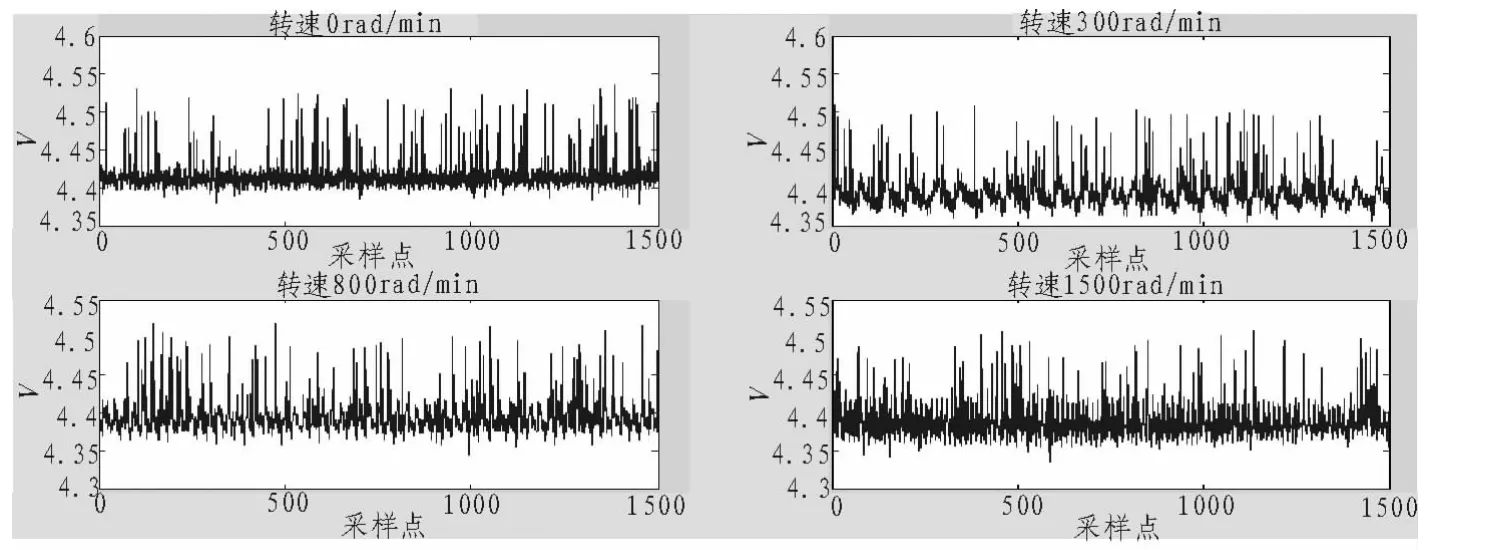
圖8 Matlab處理結(jié)果Fig.8 Processing results of Matlab
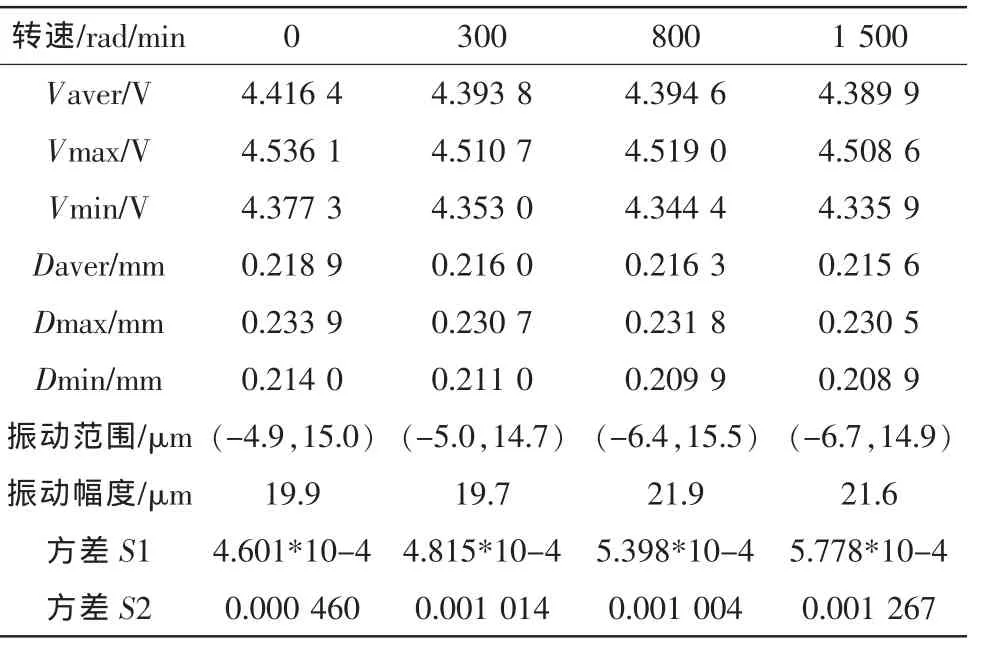
表4 單個(gè)傳感器測量數(shù)據(jù)分析Tab.4 Data analysis of asingle sensor measurement
7 結(jié) 論
文中說明了用電渦流傳感器能很好的應(yīng)用在醫(yī)療領(lǐng)域。提出的方案能基本實(shí)現(xiàn)左心室轉(zhuǎn)子的控制與測試,能從10個(gè)不同的方向監(jiān)測轉(zhuǎn)子在運(yùn)動(dòng)時(shí)的位移改變檢測和實(shí)時(shí)的控制。能精確快速測量人工心臟心室微小變化,對人工心臟進(jìn)一步研究起到了促進(jìn)作用,具有很深遠(yuǎn)的意義。但是還有著需要改進(jìn)的地方,在PID控制算法時(shí),可以采用更加先進(jìn)的控制算法,在功率驅(qū)動(dòng)時(shí)采用PWM來提高系統(tǒng)的功率。
[1]牛小兵,許愛德,王丹.DSP控制器實(shí)用教程[M].北京:國防工業(yè)出版社,2007.
[2]張小鳴.DSP控制原理及應(yīng)用[M].北京:清華大學(xué)出版社,2009.
[3]蔣立平.模擬電路與數(shù)字電路[M].北京:電子工業(yè)出版社,2004.
[4]黃友銳,曲立國.PID控制器參數(shù)整定與實(shí)現(xiàn)[M].北京:海淀區(qū),科學(xué)出版社,2010.
[5]LI Jun,LI Yun-tang.Dynamic analysis and PID control for a quadrotor[J].International Conference on Mechatronics and Automation,2011:573-578.
[6]劉金琨.先進(jìn)PID控制MATLAB仿真[M].3版.北京:電子工業(yè)出版社,2013.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45