基于加速度傳感器的油井功圖位移測量的算法設(shè)計與優(yōu)化
2013-09-26 03:47:14王永舉
電子設(shè)計工程 2013年24期
王永舉
(河海大學 能 源與電氣學院, 江蘇 南 京 2 10000)
油井示功圖的位移測量,是油井運行的一個關(guān)鍵參數(shù),也是示功圖用來診斷產(chǎn)量和判斷油井運行狀態(tài)的一個重要指標。以往的位移測量,曾經(jīng)采用拉線法測量[1],此法精度較高,但不易維護。這種測量方法的優(yōu)點是物理原理簡單,精度很高,缺點是測量儀器笨重,內(nèi)部機械部件多,加工復雜,使用中經(jīng)常出現(xiàn)線被絞斷的情況,給維護帶來很大的麻煩。現(xiàn)采用測量加速度,本設(shè)計采用新的測量位移的方法,主要是結(jié)合數(shù)字濾波和自適應(yīng)濾波設(shè)計,采用新的積分求位移算法[2],使得對示功圖位移測量的精度有了很到的提升,并且,對于那些沖程或者沖次異常的油井,也獲得很高的精度,實驗結(jié)果很好。
1 硬件設(shè)計
本設(shè)計采用采用ADXL202,是一種差容式伺服加速度傳感器,將敏感元件和信號調(diào)理電路集成在單片集成電路上,形成一個完整的加速度測量系統(tǒng)。
加速度芯片的數(shù)字輸出信號為一個方波信號,整個方波的占空比反映懸點加速度的大小和方向,芯片手冊給出的計算公式為:

在豎直方向上,向下為正,向上為負。T2根據(jù)芯片外接電阻RSET可調(diào),DC0g為芯片水平放置時,輸出波形的占空比,即0g所對應(yīng)的值;L為1g加速度所對應(yīng)的百分比比率。
對于加速度芯片,只需測量T1,利用單片機的硬件定時器(Timer)協(xié)調(diào)操作,便可實現(xiàn)對上述兩個信號的測量。硬件所需的連接相對簡單,將豎直方向的數(shù)字脈沖輸出引腳XOUT與Timer0的捕獲引腳 TIM0_CAP(圖中的ADC1)相連即可,如圖1所示。
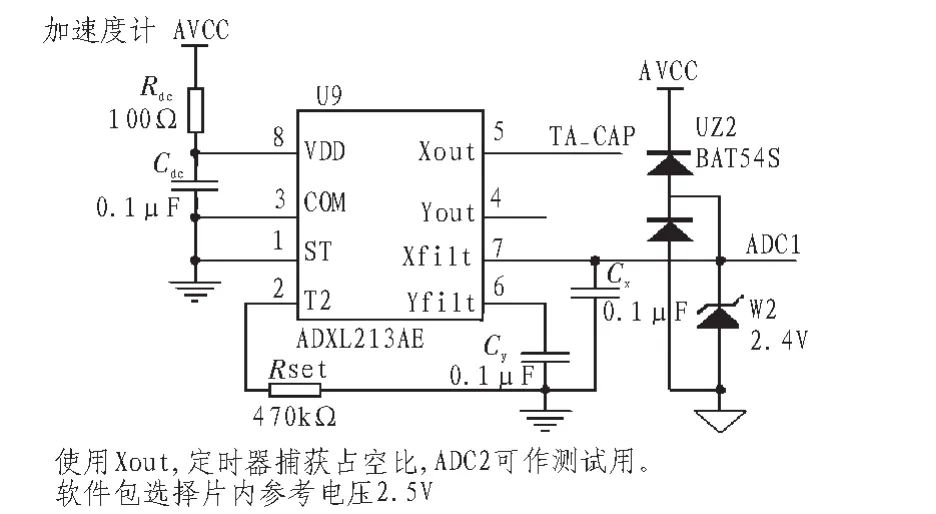
圖1 加速度傳感器硬件連接圖Fig.1 Structure diagram of Acceleration sensor hardware connection
采集信號時,首先用單片機的一個定時器定一個時間間隔,作為采樣間隔C(計算周期時,這個采樣間隔為150 ms),沒到定時結(jié)束后就定時觸發(fā)中斷,在該定時器的中斷處理中再利用另一個定時器捕獲(Capture)加速度芯片的上升沿或者下降沿信號,原理是當信號上升沿或下降沿時觸發(fā)中斷,讀取在時間間隔內(nèi)時鐘計數(shù),前后兩個脈沖計數(shù)值相減,然后乘以一個定時器的時鐘周期即可實現(xiàn)對T1的測量[3]。如圖2所示。
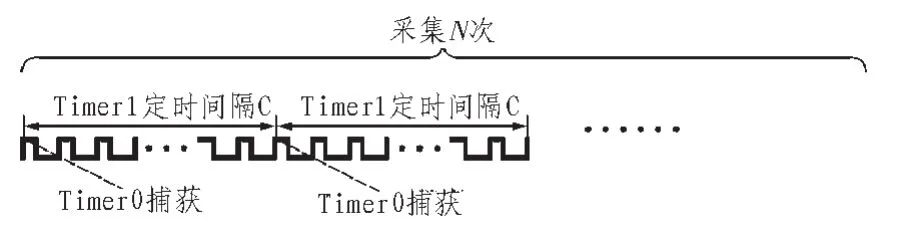
圖2 加速度采集示意圖Fig.2 Structure diagram of acceleration acquisition
這樣就可以測得每一個采樣點的加速度值,但是對于油田的實際情況,抽油機在運行的時候,井下情況復雜,幾乎不能保持在運行時的平穩(wěn),會經(jīng)常發(fā)生瞬間抖動,而這些抖動,對于加速度傳感器來講,會產(chǎn)生一個誤差脈沖,這個誤差,會使得瞬間采集的加速度嚴重失真,為了克服這個現(xiàn)象,結(jié)合硬件設(shè)計,采用新式的采點模式。以往的數(shù)據(jù)采集,每一次采點間隔的時間大約在150 ms到240 ms之間,在每到那個采集時間的點,開一次中斷,采集一次數(shù)據(jù),我們經(jīng)過試驗發(fā)現(xiàn),由于瞬間抖動或者不規(guī)則運動帶來的嚴重誤差,采集的數(shù)據(jù),不規(guī)律,毛刺現(xiàn)象嚴重,這樣的數(shù)據(jù),并不適合作為工程上的數(shù)據(jù)來源,對周期的計算判斷造成很大的影響。
針對此現(xiàn)象,本次設(shè)計做這樣處理,在本應(yīng)該才一個數(shù)據(jù)點的時候,瞬間采集多個點,在負責定時的定時器中斷產(chǎn)生后,中斷調(diào)用另一個定時器捕獲時,捕獲的子函數(shù)中,利用循環(huán)結(jié)構(gòu),采集多個加速度的值,開一個臨時數(shù)組,并將這個瞬間采集到的加速的做一個處理,采用的是取加權(quán)平均的方法,得到一個加權(quán)平均值,把這個值作為這個點的瞬時加速度,這樣子,經(jīng)過現(xiàn)場的測試,可以在很大程度上避免瞬間的抖動對我們數(shù)據(jù)采集的影響。原理如圖3所示。
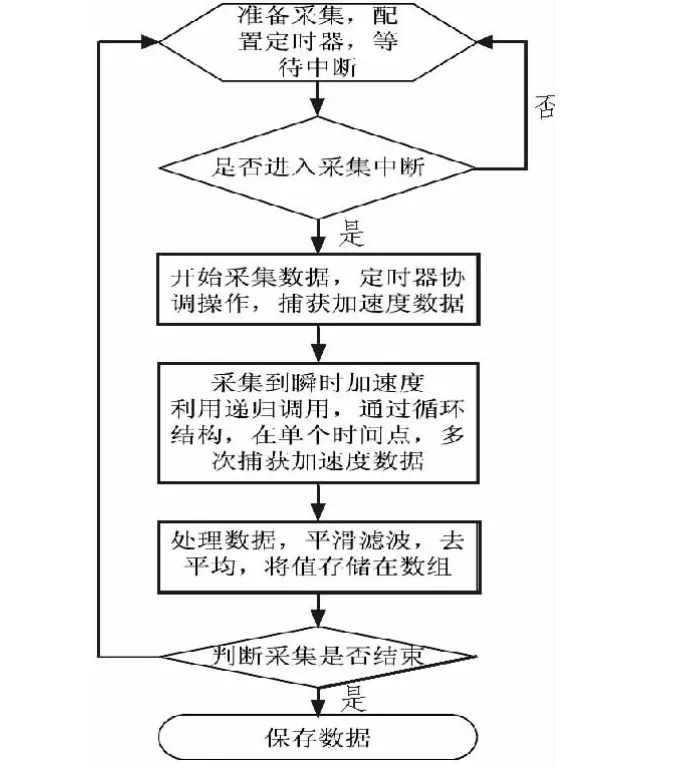
圖3 加速度采集流程圖Fig.3 Process flow diagram of acceleration acquisition
2 數(shù)據(jù)處理
2.1 計算抽油機運行周期T
為了測得正弦波的周期,我們采用基于數(shù)字濾波算法和自適應(yīng)數(shù)字濾波的算法來測算周期。
獲取T的值,是測量功圖位移的關(guān)鍵,本設(shè)計通過采集的800點加速度數(shù)據(jù),通過數(shù)字濾波算法和自適應(yīng)數(shù)字濾波處理,得出抽油機的運行周期[4]。
2.2 數(shù)字濾波設(shè)計
數(shù)字濾波[5],主要是通過對原始信號進行合理的多項式變換。在實際的工程應(yīng)用中,常用的數(shù)字濾波方法包含:粗大誤差的判定與剔除、限幅平均濾波、遞推滑塊濾波、遍歷查找極值、極值點判斷與歸并。
“粗大誤差的判定與剔除”是拉伊達法則,首先,求取采樣值的平均值,查找與均值差大于3倍標準差的粗大點,并且用粗大點的前后兩個點的平均值去替代,初步排除粗大誤差的采樣點。
“限幅平均濾波”是基于實際的加速度必然是平滑過渡的,不會出現(xiàn)突變。計算方法是通過檢測相鄰兩個點的差值的絕對值,對這個差值的絕對值進行限定。
“遞推滑塊濾波”即滑動平均濾波[6],是實際應(yīng)用中很有效的而且應(yīng)用非常廣泛的時域濾波方式,能夠有效的抑制隨機噪聲,同時不損失陡峭的邊沿信號,具體的方法是就是用點i后N個點(包括點i點本身)的平均值來代替點i的值,表達式為:Xi=(Xi+Xi+1+…+Xi+N-1)/N
經(jīng)過前面做了一系列的平滑限幅,在極大值或者極小值點處,可能會出現(xiàn)很多的相等的極值點,這樣在最后判斷周期時,就出現(xiàn)失誤,鑒于此,我們還需要對遍歷所得的極值點進行判斷,若是在同一個波峰處有多個極值點,需要進行歸并,極值點的判斷至關(guān)重要,周期的計算,主要依據(jù)各個波峰(波谷)之間的差值去計算。
2.3 自適應(yīng)數(shù)字濾波設(shè)計
為了使周期測算的更加精確,通過實時跟蹤輸入信號周期的的變化,自動調(diào)整參數(shù)的濾波方法,提高周期測算的精確性[7]。基于上面的算法,我們已經(jīng)可以得到一個周期,并且在很多的周期在20 s左右的油井上精度很高,但隨著實驗的深入,我們發(fā)現(xiàn)一個問題,就是對特別周期很長或者很短的油井,我們的濾波算法的效果不好,誤差很大
基于上述的問題,采用一種自適應(yīng)的算法,我們在第一次采集加速度計算周期的時候,我們檢測,假如算出來的粗周期小于一個下限閥值或者大于一個上限閥值的時候,我們程序會自動檢測,然后根據(jù)變化,改動采樣間隔,從新采集加速度,繼續(xù)計算,流程如圖4所示。
3 計算位移
得到周期后將進行由加速度獲取位移。在計算位移上,遇到一個問題,在又加速度計算位移的時候,積分需要初始邊界條件,但是測得的加速度沒有這個初始條件,經(jīng)過查閱文獻,最后采用一種加速度二重積分計算位移的新算法。
首先,根據(jù)加速度的線性疊加原理,

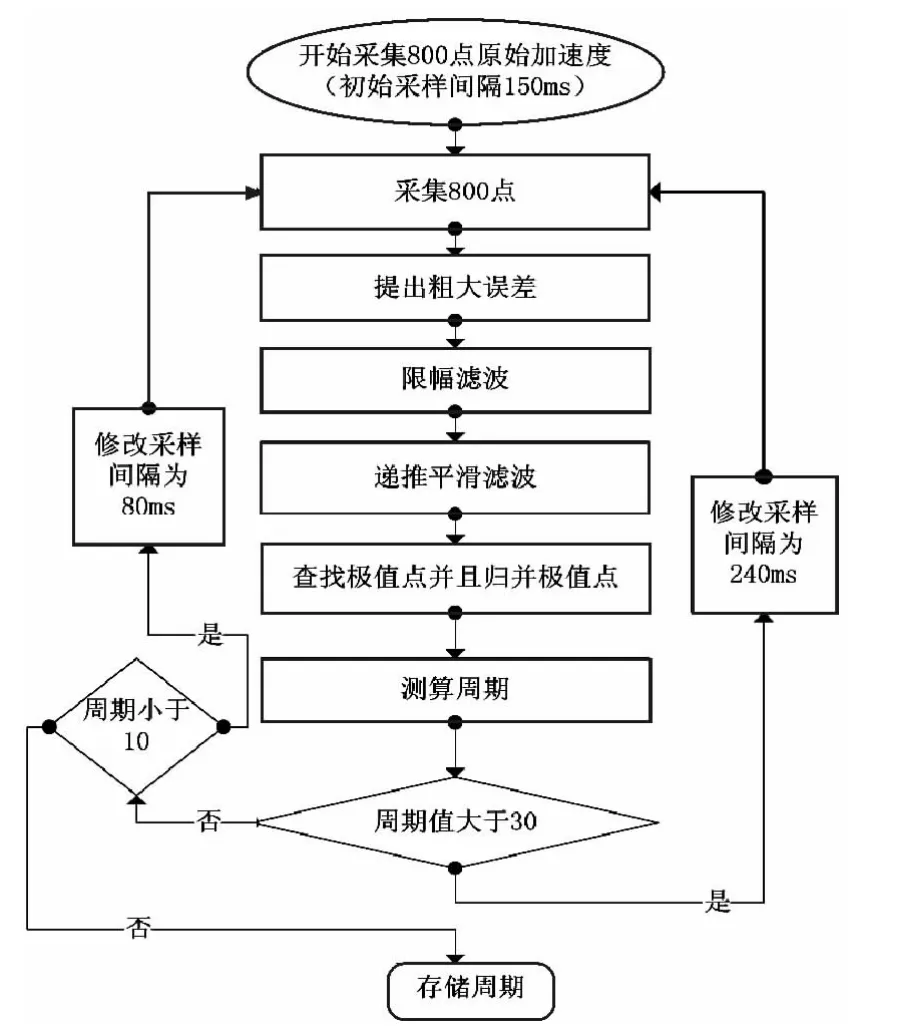
圖4 自適應(yīng)流程圖Fig.4 The adaptive process flow diagram
其中 A(t)為芯片實測值、a(t)為實際的懸點加速度、G 為重力加速度。
在時刻一個周期范圍T內(nèi),由牛頓定律有

由于抽油機的周期性運動,有
則式(2)可化

對a(t)進行積分得到速度公式

同樣考慮抽油機運動的周期性,在一個采油周期結(jié)束后回到原點,有 S(T)=S(0),
速度公式變?yōu)?/p>

最后,設(shè)位移的起始點位移為零,得到相對于起始點的位移計算公式

據(jù)以上推導最終得出結(jié)論:某時刻,抽油機懸點加速度的值等于該時刻加速度傳感器的測量值減去一個周期加速度測量值的平均值;在邊界為零的條件下,對t時刻懸點加速度積分得到速度,并將該速度值減去一個周期內(nèi)所有積分速度的平均值,即可得到該時刻修正后的速度值;在邊界為零的條件下,對速度積分得到相對位移。
該算法的特點,是以一個周期T內(nèi)的加速度傳感器采集值為研究對象,以初始采集點為參考點,最后需將求出的位移的參考點轉(zhuǎn)換為“下死點”。
4 位移計算結(jié)果
現(xiàn)場實際的測試結(jié)果如表1所示。
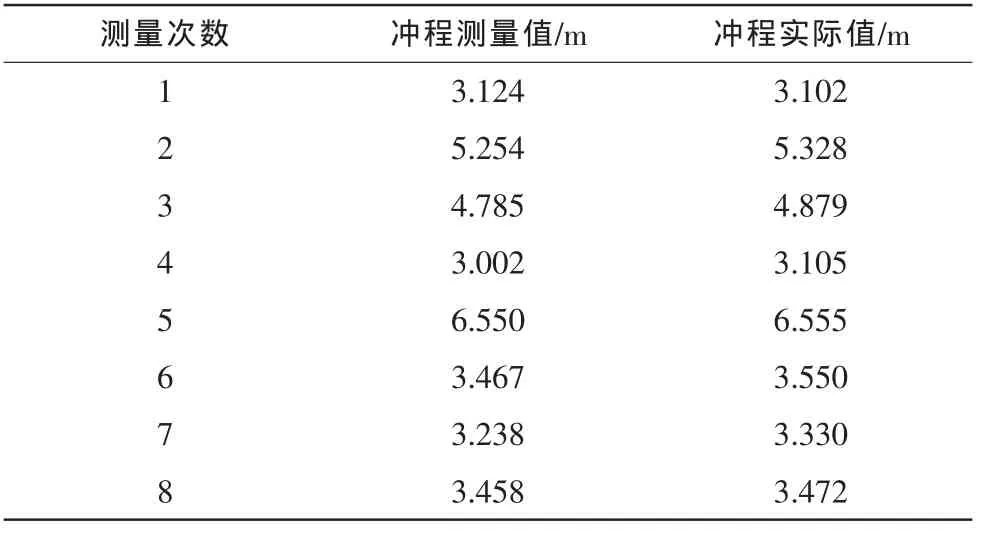
表1 位移測試結(jié)果Tab.1 Test result of stroke
由實驗數(shù)據(jù)知道,經(jīng)由我們算法得出的沖程位移的測量誤差在5%以內(nèi),精度很高,同時,可以通過表格發(fā)現(xiàn),對于沖程很長或者很短的油井,測量精度很好,說明該算法通用性很強,適用于多種情況的油井,有較好的推廣價值。
5 結(jié)束語
到此,完成了介紹由采集加速度,測算周期[8],到計算位移的一個完整的算法設(shè)計和硬件設(shè)計過程,為得到最后示功圖做了準備。在實際應(yīng)用中,該算法在單片機中實現(xiàn)簡單,硬件資源占用少,同時測量精度很高。該設(shè)計在江蘇油田得到大力推廣,江蘇油田的試采一廠和試采二廠采用的本設(shè)計的算法,取得了良好的經(jīng)濟效益和社會效益,充分驗證了該設(shè)計的合理性和實用性。
[1]彭健.基于傳感器技術(shù)的油井示功儀的研究[J].傳感器技術(shù)學報,2012(12):1701-1704.
PENG Jian.Research on well dynamometer based on sensor technology[J].Chinese Journal of Sensors and Actuators,2012(12):1701-1704.
[2]張家珍.基于加速度傳感器的示功圖測試與分析系統(tǒng)研究[D].北京:中國石油大學,2008.
[3]許亞男,高清維,翟寄文,等.基于MAX197的高精度數(shù)據(jù)采集系統(tǒng)[J].電子技術(shù),2009(6):22-23.
XU Ya-nan,GAO Qing-wei,ZHUO Ji-wen,et al.A high accuracy data acquisition system based on MAX197[J].Electronic Techniqy,2009(6):22-23.
[4]寇攀峰,呂強中.合理選擇基于單片機的數(shù)字濾波方法[J].微處理機,2004(1):76-79.
KOU Pan-feng,LU Qiang-zhong.How to choose a good digital filter on single chip computer system[J].Microcomputer Processing,2004(1):76-79.
[5]梁志國.信號周期的一種數(shù)字化測量方法[L].儀器儀表學報,2003(4):195-198.
LIANG Zhi-guo.The per iod prec ise evaluation of per iodicwaves[L].Chinese Journal of Scientific Instrument,2003(4):195-198.
[6]趙毅,牟同升,沈小麗,等.單片機系統(tǒng)中數(shù)字濾波的算法[J].電測與儀表,2001(6):178-182.
ZHAO Yi,MOU Tong-shen,SHEN Xiao-li,et al.Digital filtering algorithm in SCM system[J].Electrical Measurement and Instrumentation,2001(6):178-182.
[7]朱恒軍,王發(fā)智,姚仲敏,等.基于單片機的數(shù)字濾波算法分析與實現(xiàn)[J].齊齊哈爾大學學報,2008(6):56-58.
ZHU Heng-jun,WANG Fa-zhi,YAO Zhong-min,et al.Analysis and implementation of digital filtering algorithm based on single chip microcomputer[J].Journal of Qiqihar University,2008(6):56-58.
[8]施先旺,劉婷婷,李國良.采用有限狀態(tài)機實現(xiàn)控制指令的可靠檢測[J].火箭推進,2011(5):63-68.
SHI Xian-wang,LIU Ting-ting,LI Guo-liang.Control instruction detection realized by finite state machine[J].Journal of Rocket Propulsion,2011(5):63-68.
猜你喜歡
石油石化節(jié)能(2022年12期)2022-12-30 04:45:02
電子制作(2019年13期)2020-01-14 03:15:28
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電子設(shè)計工程(2015年15期)2015-02-27 12:07:30
中國煤層氣(2014年6期)2014-08-07 03:07:05