經編機梳櫛的橫移振動分析
2013-09-27 09:13:36夏風林李懷宇孫黎明
紡織學報 2013年7期
張 琦,夏風林,劉 念,李懷宇,李 萍,孫黎明
(江南大學經編技術教育部工程研究中心,江蘇無錫 214122)
傳統機械式經編機的電子化改造是經編裝備數字化升級的重要手段之一,導紗梳櫛作為經編機成圈機構中的核心部件,其橫移運動也改由伺服電動機驅動,但其前后擺動依然由擺臂驅動[1]。由橫移運動和前后擺動合成的導紗運動,直接決定了系統運行的效果,但導紗運動的平穩精確與否,卻由導紗梳櫛本身內在的靜態和動態特性決定,因此,對經編梳櫛固有特性及動力學特性的分析,是開展經編梳櫛減振研究的基礎[2]。
此前對經編機橫移機構的研究主要集中在橫移系統伺服控制[3],和擺臂機構靜力學分析方面[4],而少見有對經編梳櫛本身靜態和動態特性分析,以及該固有特性對經編梳櫛導紗運動,乃至對整個編織系統運行效果影響的研究。本文通過搭建聲學振動測試平臺,對經編梳櫛的關鍵動力學參數進行測試并獲取幅頻特性,評價其抗振性能并驗證振動理論分析的正確性,尋找潛在的振動問題并提出有效的減振措施。
1 梳櫛振動特性分析
1.1 振動產生原因
梳櫛橫移是按照織物花型要求進行線性往復運動,本身就是一種振動形式,由于其運動速度快,頻率高,且屬于停止→動作→停止間歇式啟停運動,因而橫移電動機對傳動機件有節奏的驅動就是一個有效的激振源,使梳櫛等作受迫振動而橫移。經編機每編織1個橫列,梳櫛所受的橫移驅動力的方向都會發生反向,同時梳櫛橫移運動的方向也會滯后跟隨反向,因此,隨著經編機轉速的不斷提高,梳櫛所作受迫振動的頻率也不斷攀升[5],激振作用不斷加劇,處于高頻受迫振動的經編梳櫛,當激振頻率與其固有頻率接近時,就會因機械共振對橫移定位產生不利影響。
1.2 振動分析原理
應用實驗模態分析技術可得到經編機梳櫛的固有頻率、阻尼比動力學參數以及反應單位激振力振動幅值響應的幅頻特性。通過實驗測得梳櫛在特定的頻率范圍內各階主要模態特性,就可分析梳櫛在橫移動力裝置和擺臂驅動下的實際振動響應[6]。
式中:X作為響應向量,特指梳櫛在單一方向的加速度;F作為激振力,特指梳櫛受到橫移裝置的驅動力;Y為梳櫛不同部位頻響函數矩陣。在振動測試實驗過程中,梳櫛某一方向的加速度采用粘貼在梳櫛不同部位的加速度傳感器測量,經編機橫移動力裝置施加在梳櫛上的驅動力可以作為激振力,利用振動頻譜分析軟件繪制出梳櫛各部位的頻響函數曲線,通過分析頻響函數,獲得經編梳櫛的固有頻率、阻尼比等關鍵動力學參數。
動剛度測試原理可表示為:

式中:ω為橫移激振力頻率;A為梳櫛受激振幅;Kj為梳櫛靜剛度;ωn為梳櫛固有頻率;ξ為梳櫛阻尼比。經編機梳櫛在被橫移驅動裝置以一定頻率驅動時所表現出來的剛度稱為動剛度,是衡量梳櫛抗振性的主要指標,當梳櫛發生共振時動剛度值最低[7]。在實驗中通過對梳櫛施加不同頻率的激振力,測試梳櫛在不同振動頻率下的激振力幅值和響應幅值即可計算其動剛度。
2 振動測試及結果分析
2.1 測振平臺
搭建聲學振動測試平臺所用關鍵設備有:KS4型特里科經編機(Karl Mayer公司)、3560C型四通道聲學與振動分析系統(B&K公司)、4507B型4個加速度傳感器和安裝有模態分析軟件的便攜式電腦。基于聲學振動測試平臺對經編梳櫛進行模態分析的實驗連線示意圖如圖1所示。利用經編機空運轉時產生的振動作為激勵,在梳櫛的機尾端、梳櫛的軸向質心處、梳櫛的機頭端、梳櫛橫移電動機絲桿箱輸出端的彎臂鋁塊上,分別固裝1#~4#加速度傳感器,并連接至聲學與振動分析系統的1~4號信號通道,導紗梳櫛各測試點的加速度數據分別由4個通道進行采集處理,再由軟件進行模態分析[8]。
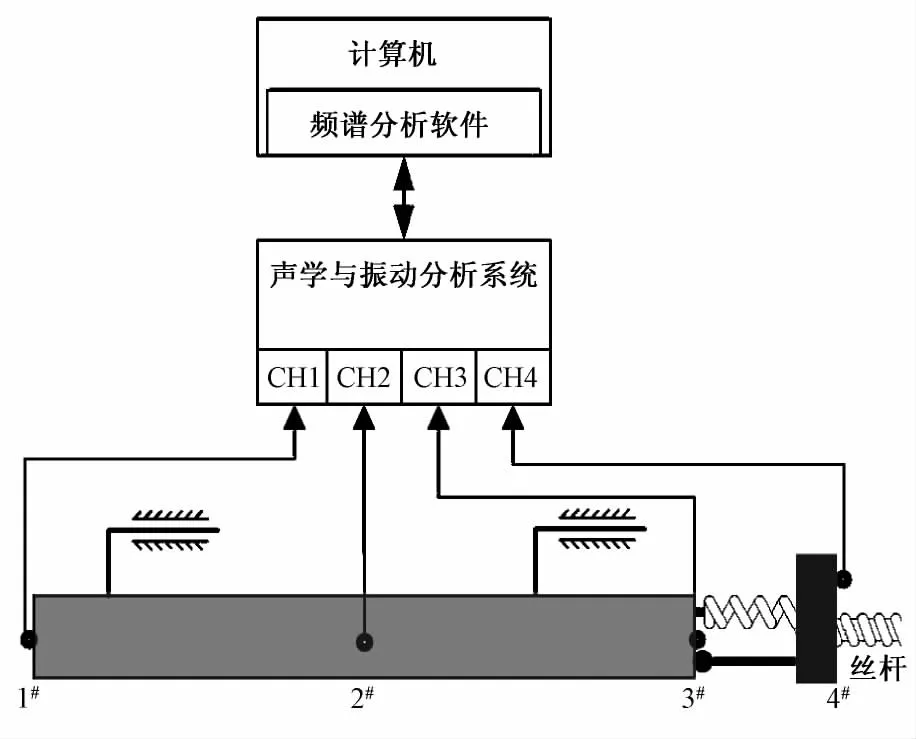
圖1 測試點位置選取及連線Fig.1 Sensor positions and connection
2.2 測試內容
進行梳櫛的減振技術研究,首先要對其進行動態特性測試分析,為評價梳櫛的抗振性能以及后續動力學分析的需要,將響應測試、模態測試和動剛度測試作為振動實驗內容。首先進行響應測試,在空運轉時測定對應不同機速狀態下梳櫛的響應情況。其次,采用激振法對其進行模態實驗,以測得各階固有頻率、阻尼比和振型等模態參數。最后,對梳櫛進行動剛度測試,測定其橫移和擺動方向的動剛度。
實驗工藝為經平組織1-0/1-2//,將橫移電動機調試至最佳狀態,啟動主軸電動機進行空轉振動響應測試。轉速從零開始直到實驗經編機的最高轉速1 000 r/min,轉速間隔分別為50 r/min,在不同轉速下測量梳櫛的振動參數[9]。為防止熱效應引起的誤差[10-11],響應數據采集要在經編機空運轉30 min以后進行。四通道聲學與振動分析系統測量的原始數據為加速度信號,通過對時間積分,由該分析系統自帶的處理軟件可得到速度和位移曲線圖譜,用于進一步分析。
實驗中,將梳櫛的導紗運動進行解耦,通過模擬主軸轉動使梳櫛只進行橫移運動而無擺動,通過加載全零花型使梳櫛只有擺動而無橫移運動,這樣作可將只橫移時的橫移驅動裝置,和只擺動時的擺臂施加在梳櫛上的力分解開,并分別作為梳櫛在x和y方向的激振力,來測定梳櫛這2個方向的動剛度。
2.3 結果分析
借助3560C型聲學與振動測試系統分析軟件強大的分析處理功能,首先輸入1#~4#傳感器在被測梳櫛上的物理坐標(以4#測量點為原點,指向1#測量點,即機尾方向為正)以及梳櫛的幾何特征,構建經編梳櫛的幾何模型[12],然后以4#測量點作為激勵點,并導入4個加速度傳感器通道采集到的響應數據,分析處理后得到該梳櫛模型的頻響函數,最后根據頻響函數,確定擬合頻段并進行自動曲線擬合,得到梳櫛的各階固有頻率和阻尼比。由一階固有頻率可以推算梳櫛的共振點,當梳櫛的激振頻率在固有頻率附近時,會產生強烈的顫振。表1示出梳櫛前5階固有頻率和阻尼比。
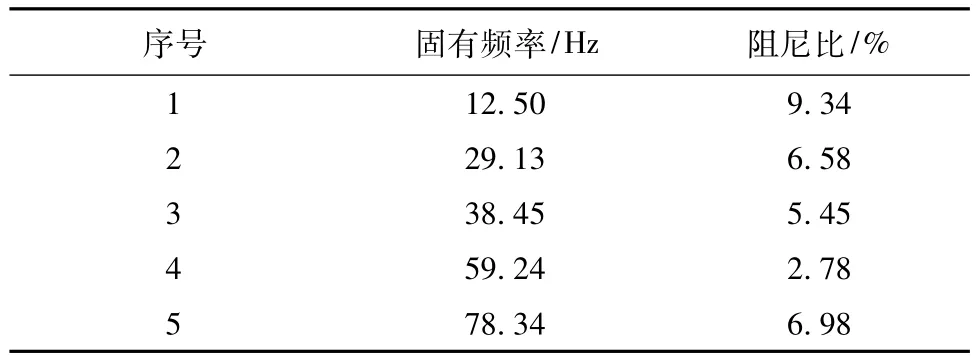
表1 KS4經編機梳櫛前5階固有頻率和阻尼比Tab.1 Top 5 order natural frequency and damping ratio
圖2 示出實驗經編機導紗梳櫛只進行橫移運動時測得的質心處(2號通道)加速度曲線。因為墊紗組織為1-0/1-2//,因此梳櫛橫移針前和針背各1次且每次橫移距離均為1個針距。理論上2次橫移中間時段梳櫛應處于靜止狀態,觀測圖2曲線可知此時段梳櫛的加速度并不為零,梳櫛有輕微顫振現象,此時梳櫛受到橫移動力裝置和擺臂在2個方向的連接,改善顫振情況需從提高這2個構件的剛度入手。
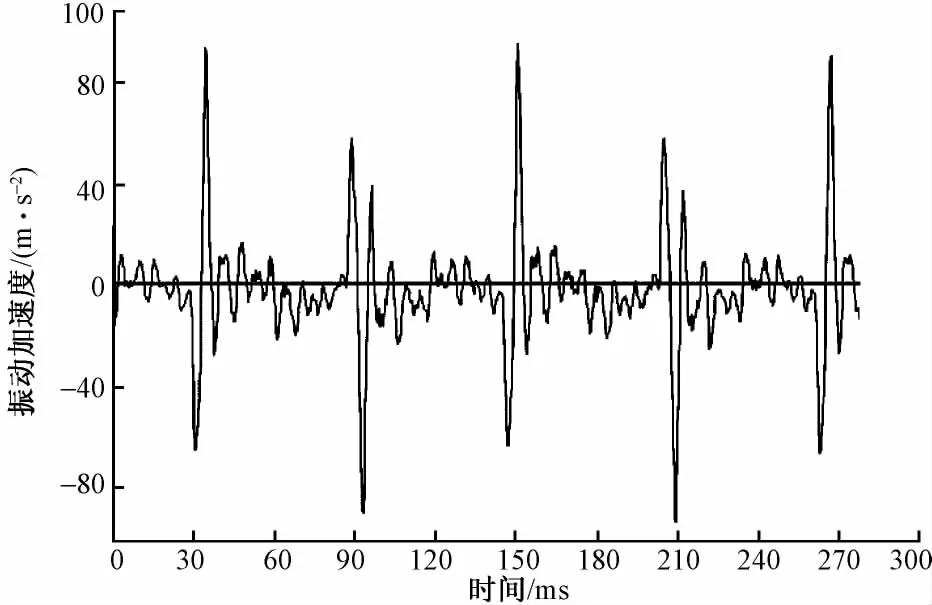
圖2 只橫移不擺動的加速度曲線Fig.2 Acceleration curve of shogging
圖3 示出全零墊紗時梳櫛只進行擺動,梳櫛機尾處(1號通道)測得的位移曲線。梳櫛只擺動的時候橫移驅動裝置對其不施加驅動力,只有擺臂的驅動力作用在梳櫛上。觀測圖3曲線可知,梳櫛擺動到偏離織針工作面最遠端處的位置并不是梳櫛進行橫移的位置,因為在最遠端梳櫛均會先回退適當距離,然后再進行橫移運動,且在針前針背梳櫛擺動的位移偏離值不同,在針前的位移偏離值稍大。
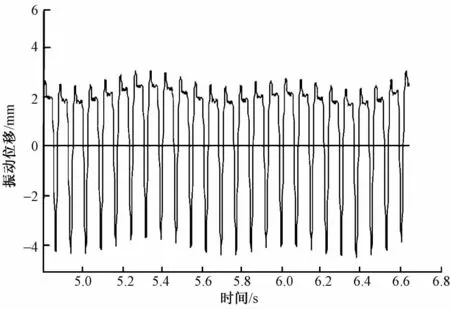
圖3 只擺動不橫移的位移曲線Fig.3 Displacement curve of switching
3 減振措施
由振動控制理論可知,減振控制主要有3大類技術:降低共振振幅的阻尼技術,切斷振動傳遞的隔振技術和應用動力吸振器的吸振技術[13]。根據梳櫛的結構和運動特點并結合實驗設備的具體條件,可以選用解調、改變梳櫛質量和調整阻尼結構3種減振措施來改善梳櫛的振動。
3.1 解調減振
梳櫛的橫移運動為周期性受迫振動,振動周期為主軸轉動1周完成1次橫移運動,由伺服電動機組成的橫移動力裝置進行周期驅動。目前KS4經編機的工作速度一般都在400~1 200 r/min,工作頻率為6.7~20 Hz,由表1振動測試數據可知梳櫛的一階固有頻率(12.5 Hz)也在這個范圍內。由于在機械構件的頻響區域中,一階固有頻率激振幅值最大,對外界的破壞力也最強,這與實驗測試結果相吻合,因為當實驗經編機機速在700~800 r/min之間,尤其是在750 r/min附近時,測得梳櫛的振動加速度幅值有明顯異常增幅,但越過此區域后恢復常態,說明當經編機運行在750 r/min附近時,梳櫛本身與橫移運動產生了機械共振[14],因此,經編機的正常工作頻率必須避開這一頻率區域,即正常工作機速要高于或者低于共振機速。
3.2 輕質減振
實驗用經編機KS4配置4把梳櫛,每把的質量均不相同,可以通過調換梳櫛對象來改變測試梳櫛質量,以此測定梳櫛隨質量變化時的振動響應。通過響應特性測試分析,可以確定更為合適的梳櫛質量,評價其對橫移振動的影響。實驗工藝仍為1-0/1-2//,選取機速900 r/min,保證4把梳櫛均避開其共振區。表2示出KS4經編機不同梳櫛對應頻響函數數據。由表2測試數據可以看出,梳櫛質量越輕,振動加速度的絕對平均值越大,而頻響函數峰值越小,其橫移運動平穩度越高。可見,減小質量,即經編梳桎的輕質化(如碳纖維梳桎)設計,可以減少梳桎橫移時的機械振動。
3.3 阻尼減振
因實驗機臺為卡爾邁耶早期生產的特里科經編機,雖原機械結構經過改造后更換為現有的電子橫移動力裝置,但是梳櫛的直線軸承及彈簧阻尼器卻沒有改變,如圖4所示。根據對圖2的分析可知,梳櫛在橫移運動間隙時段,在既無橫移又無擺動時仍
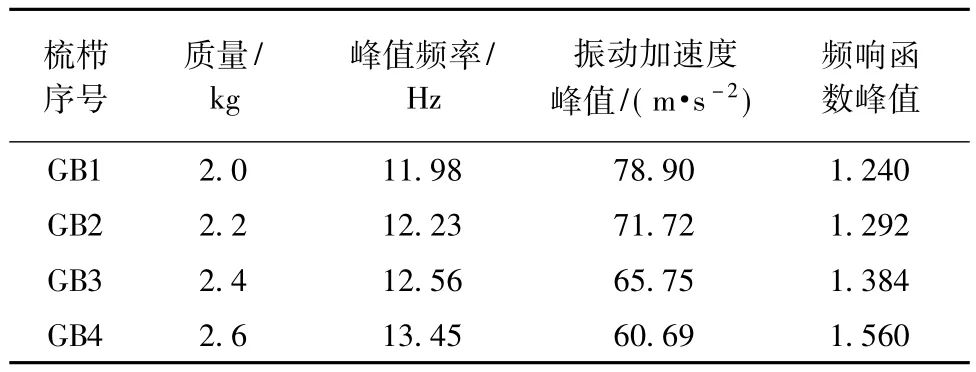
表2 KS4經編機不同梳櫛對應頻響函數數據Tab.2 Frequency response data of four guide bars
有小幅顫振,是由于連接件剛度不夠,據此可對阻尼器的彈簧進行更換,增大剛度值,有利于鎖緊梳櫛,吸收激振能量并減少振動。通過實驗測試,采用這一方法,梳櫛擺動時橫移方向的顫振得到明顯改善,加速度幅值降低約40%。
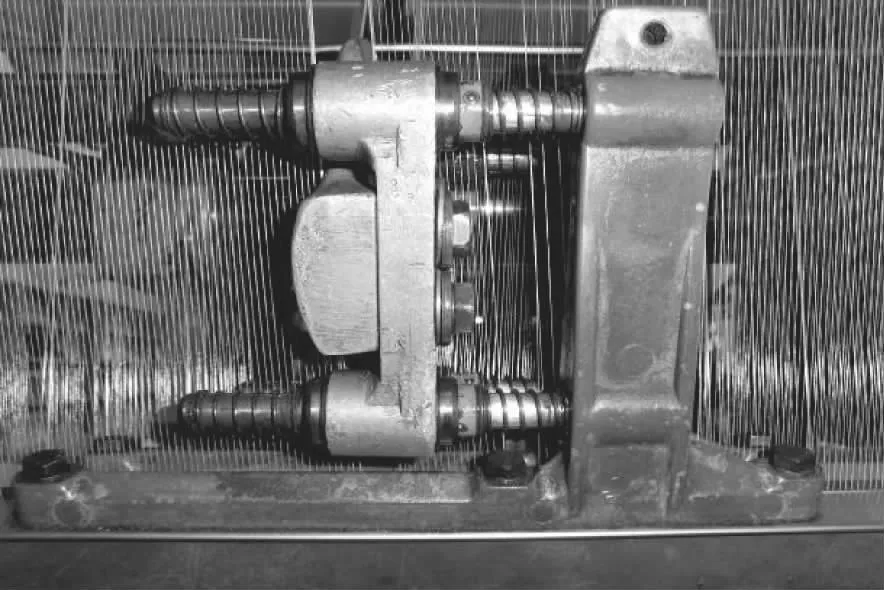
圖4 梳櫛彈簧阻尼器Fig.4 Spring damper of guide-bar…
4 結論
1)所建聲學振動測試平臺能對經編梳櫛的機械振動進行有效的測試,可作為梳櫛的抗振性及穩定性研究平臺,是分析梳櫛動力學特性,及研究橫移運動振動影響因素時可以采用的有效技術手段。
2)經由伺服驅動的經編機其工作頻率一般為6.7~20 Hz,而經編導紗梳櫛的一階固有頻率在12.5 Hz附近,位于機臺工作頻域內,因此機臺正常生產速度應避開共振速度區域,可有效降低導紗運動時的機械振動。
3)在外界同等激勵條件下,質量輕的梳櫛表現出更高的運動平穩性,降低梳櫛質量可以改善梳櫛的橫移振動,并可為梳櫛的輕質化設計提供理論參考。
4)調整梳櫛的阻尼減振結構,更換大剛度系數彈簧后可以降低梳櫛橫移靜止時的顫振,并提高梳櫛橫移的精度。
[1]孔震,蔣高明,夏風林.高速經編機電子橫移原理探討[J].針織工業,2007(9):12-14.KONG Zhen,JIANG Gaoming,XIA Fenglin.Research on the electronic shogging mechanism of the high speed warp knitting machine [J].Knitting Industries,2007(9):12-14.
[2]XIA Fenglin, GE Mingqiao.Motion rule of electronically pattern system on a high speed warp knitting machine[J].Fibers & Textiles in Eastern Europe,2009,17(4):64-67.
[3]夏風林,蔣高明,葛明橋.高速經編機電子橫移系統運動精度分析[J].紡織學報,2009,30(3):106-110.XIA Fenglin,JIANG Gaoming,GE Mingqiao.Moving precision analysis of electronic shogging system on high speed warp knitting machine[J].Journal of Textile Research,2009,30(3):106-110.
[4]孫奎周,周金宇,曹清林.經編機擺動臂有限元分析及優化設計[J].江蘇技術師范學院學報,2011,17(10):12-16.SUN Kuizhou,ZHOU Jinyu,CAO Qinglin.The finite element analysis and optimization design of the warp knitting machine swing arm[J].Journal of Jiangsu Teachers University of Technology,2011,17(10):12-16.
[5]夏風林,葛明橋,蔣高明.高速經編機梳櫛橫移運動的優化設計[J].紡織學報,2009,30(5):106-109.XIA Fenglin, GE Mingqiao, JIANG Gaoming.Optimizing design ofshogging motion of the guide bar on high speed warp knitting machine[J].Journal of Textile Research,2009,30(5):106-109.
[6]于德介,程軍圣,楊宇.機械振動學[M].長沙:湖南大學出版社,2010,42-45.YU Dejie,CHENG Junsheng,YANG Yu.Mechanical Vibration[M].Changsha:Hunan University Press,2010,42-45.
[7]徐趙東,馬樂為.結構動力學[M].北京:科學出版社,2007:33-34.XU Zhaodong,MA Lewei.Structure Dynamics[M].Beijing:Science Press,2007:33-34.
[8]劉繼承,徐慶華,查建新.用加速度傳感器測量振動位移的方法[J].現代雷達,2007,29(5):69-71.LIU Jicheng, XU Qinghua, ZHA Jianxin.The measuring method of vibration displacement with acceleration sensor[J].Modern Radar,2007,29(5):69-71.
[9]易啟偉.振動機械測試系統[J].糧食與飼料工業,1999(2):11-13.YI Qiwei.Vibration mechanical test system[J].Food and Feed Industry,1999(2):11-13.
[10]韓志華,羅學科.機床加工過程中的振動實驗研究[J].機床與液壓,2007,35(2):76-79.HAN Zhihua,LUO Xueke.The experimental research of vibration in CNC turning process[J].Machine Tool& Hydraulics,2007,35(2):76-79.
[11]吳永春.經編機梳櫛電子橫移機構及控制方式的研究[J].機電技術,2011,10:52-54.WU Yongchun.The electronic horizontalmotion mechanism and control mode study of the guide bar on warp knitting machine[J].Mechanical and Electrical Technology,2011,10:52-54.
[12]傅志方,華宏星.模態分析理論與應用[M].上海:上海交通大學出版社,2000:27-28.FU Zhifang,HUA Hongxing.Modal Analysis Theory and Application[M].Shanghai:Shanghai Jiao Tong University Press,2000:27-28.
[13]任明章.機械振動的分析與控制以及計算方法[M].北京:機械工業出版社,2011:40-41.REN Mingzhang.Mechanical Vibration Analysis and Control and Calculation Method [M].Beijing:Mechanical Industry Press,2011:40-41.
[14]董學武,李建華,張啟峰.新型織機綜框的減振技術研究[J].紡織學報,2002,23(1):40-42.DONG Xuewu,LI Jianhua,ZHANG Qifeng.Damping technology research of the new loom heald frame[J].Journal of Textile Research,2002,23(1):40-42.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
