基于信譽度的合作式頻譜感知
2013-09-29 05:19:56張曉玉李生紅
計算機工程 2013年1期
張曉玉,袁 野,杜 榮,李生紅
(1.上海交通大學電子信息與電氣工程學院,上海 200240;2.上海對外貿易學院商務信息學院,上海 201620)
1 概述
隨著無線通信的飛速發展,頻譜資源匱乏的問題日趨嚴重。傳統的固定頻譜分配模式是導致這一現象的主要原因,因此認知無線電技術應運而生。認知無線電技術最早由Joseph Miltola于1999年提出[1]。而頻譜感知是認知無線電的基礎和前提,頻譜感知技術要求次用戶能夠快速準確識別主用戶是否存在。目前,頻譜感知技術主要包括能量檢測、匹配濾波檢測和循環平穩檢測,3種方法各有優劣。能量檢測算法[2]最簡單,應用也最為廣泛,但是需要知道噪聲功率,因此受到噪聲不確定性[3]因素的影響;匹配濾波法[4]需要知道信道響應函數,且需要精確的時間同步技術;循環平穩檢測算法[5]檢測率一般比較高,但是其一方面需要知道主用戶信號的循環頻率,另一方面計算復雜度高,不利于信道快速切換。
單用戶頻譜感知的性能受到路徑損耗和陰影效應的影響。路徑損耗大多與感知用戶與主用戶間的位置有關系,而陰影效應主要由物體對主信號的物理阻擋而造成的。因此,目前提出多個次用戶以合作的方式共同決定主用戶是否存在合作式頻譜感知算法。合作感知算法一般可分為:本地感知,感知信息傳遞和感知信息融合3個階段。其中,感知信息融合是目前合作式頻譜感知的研究熱點和難點。
文獻[6]提出了在數據融合階段存在的安全性問題——拜占庭式錯誤。拜占庭錯誤是指由惡意感知終端或頻譜感知數據偽造攻擊所引起的問題。在拜占庭錯誤中,惡意用戶可能會不可靠地進行本地頻譜感知,或者將不正確的感知結果發送給融合中心。為了避免這一問題,文獻[6-7]提出了基于信譽度的線性融合的合作式頻譜感知算法。在這2種算法中,CR用戶的信譽度都是建立在一段時間內CR用戶本地感知結果和整體感知結果匹配度的基礎上的。然后,信譽度高的CR用戶在數據融合中的權重就高。這種信譽度更新算法存在兩方面的問題:(1)將惡意CR用戶與處于深衰落環境下的CR用戶都歸類為信譽度低的用戶,這將導致深衰落環境下的CR用戶移動到非深衰落環境下時,其感知結果仍然不能得到好的利用。(2)關于融合中心,如果固定融合中心,那么一旦融合中心受到惡意攻擊,給整個系統造成了極大的不穩定;如果CR用戶輪流做融合中心,那么融合中心本身的信譽度對結果的影響也應當考慮進去。
基于以上的考慮,本文提出一種新的基于信譽度的合作式頻譜感知算法。該算法考慮到CR用戶因為所處的環境位置不同而導致的其感知匹配度不同,提出了 2種類型的信譽度——自私信譽度和位置信譽度。所有CR用戶以地理位置分為不同的簇,每個地理簇里的CR有共同的位置信譽度,每個CR用戶有各自的自私信譽度。每個簇內先進行數據融合,然后再進行總的數據融合。每個簇的簇頭和總簇頭由各個CR用戶輪流來做。而數據融合和信譽度更新階段,CR用戶本身信譽度和當前簇頭信譽度都對權重及最后的結果有影響。
2 系統模型
合作式頻譜感知包括本地感知、感知信息傳遞和信息融合3個階段。
2.1 本地感知
本文中本地感知使用 CAV算法[8]。CAV算法信號模型如下:

L個連續采樣的x(n)統計協方差矩陣為(IL是L階單位矩陣):

顯然有主用戶不存在時 Rx是對角矩陣(矩陣非對角線上元素都為0),主用戶存在時Rx不是對角矩陣,以此設立閾值。定義Rx中第m行第n列的元素為rmn。定義:


使用比值T1/T2做判定,如果T1/T2=1,主用戶信號不存在;反之,如果 T1/T2>1,則主用戶信號存在。
2.2 感知信息傳遞
假設 CR網絡中有 N個用戶,分別為 CR1,CR2,…,CRj,…,CRN(j=1,2,…,N)。然后基于地理位置把所有 CR用戶分簇[9]分為 A個簇,分別為 S1, S2,…Si,…,SA(i=1,2,…,A)。每個 Si有 Ni個 CR 用戶和 1個簇頭Ci,自私信譽度高的次用戶作為總簇頭C。每個CR用戶把其本地感知信息傳給其所在簇的簇頭,然后所有簇頭再把信息傳遞給總簇頭C。因為考慮到控制信道的利用情況,在這里采用硬判決方式,也即傳遞的信息都是檢測判決結果0或1。
2.3 感知信息融合
本文算法中的感知信息融合分為簇內感知信息融合和簇間感知信息融合2個階段。簇內感知信息融合是指簇Si的簇頭Ci對其簇內Ni個次用戶的感知結果的融合,融合過程考慮到各次用戶的自私信譽度。而簇間感知信息融合是指總簇頭 C對所有簇的簇頭Ci(i=1,2,…,A)的感知信息的融合,融合過程考慮到各簇的位置信譽度。具體融合算法將在下一節具體討論。
3 融合算法
3.1 基于信譽度的分簇合作式頻譜感知
本文提出了一種基于信譽度的分簇合作式頻譜感知算法,系統框圖如圖1所示。具體算法如下:
(1)初始化自私信譽度和位置信譽度:初始化所有CRj的自私信譽度 Rsj=1;初始化各簇的位置信譽度 Rri=1。
(2)分簇和次用戶頻譜感知:所有CR用戶按地理位置分簇,分成A個簇;所有次用戶CRj進行頻譜感知,得感知結果 Uj,將 αj發送到相應的簇頭 Ci。Ci由簇內信譽度最高的CR用戶輪流來做。
(3)簇內信息融合:各個簇頭 Ci對其接收到的 αj進行簇內數據融合,融合結果為 gi= θ (αjΘi) ,其中,θ是簇內融合算法;αjΘi代表屬于第i個簇的所有CR用戶的發送感知結果。然后簇頭 Ci將 fi發送到總簇頭C。
(4)簇內自私信譽度更新:各 Ci根據最后發送結果 fi和簇內各 CR的檢測結果 αj作比較,對簇內 CR的Rsj進行更新。
(5)簇間信息融合:總簇頭 C將所收到的 fi做數據融合,融合結果為 G=θ(fi),將 F發送到控制中心作為最終的合作檢測結果。其中,θ是簇間融合算法。
(6)簇間位置信譽度更新:C根據最后發送到控制中心的結果 G和各簇融合結果 fi作比較,對各簇的Rri進行更新。
(7)以更新過的 Rsj和 Rri跳到第(2)步重復進行。其中,j=1,2,…,N,i=1,2,…,A。
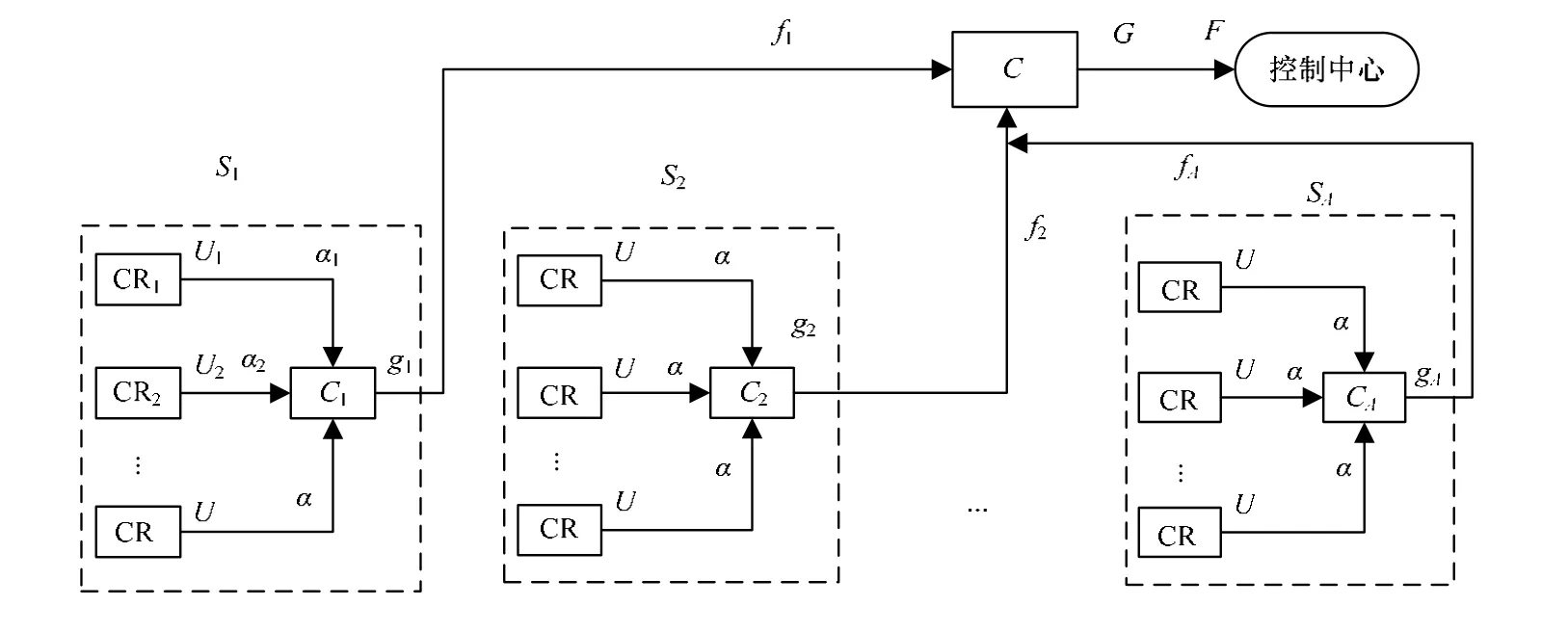
圖1 融合算法系統框圖
3.2 信譽度更新
如上述算法的第(4)步,每完成一次簇內感知后,各Ci根據最后發送結果fi和簇內各CR的檢測結果αj作比較,對簇內 CR的 Rsj進行更新。當 αj=fi時,相應的 Rsj上升;反之,當 αj≠fi時,Rsj下降。
同樣地,對于位置信譽度,一次完整的合作式頻譜感知后,總簇頭C要根據最終發送到控制中心的感知結果F和各簇發送過來的fi(i=1,2,…,A)之間的匹配程度,更新各簇的位置信譽度Rri。當fi=F時,Rri上升;反之,當fi≠F時,Rri下降。
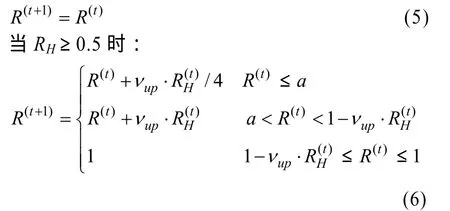
下面為了公式表示的統一,設需要更新的t時刻信譽度和更新后的 t+1時刻信譽度分別為 R(t)和R(t+1)(自私信譽度更新中為 Rsj;位置信譽度更新中為Rri),簇頭的信譽度為RH(自私信譽度更新中為所在簇簇頭的信譽度;位置信譽度更新中為總簇頭的信譽度)。
其中,R上升的原則如下:
當RH<0.5時:
R下降的原則如下:當RH<0.5時:
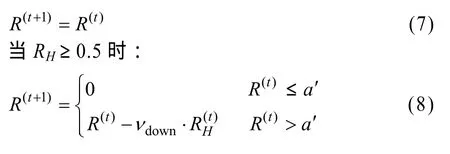
其中,νup和νdown分別是上升因子和下降因子;a和a′分別是上升停值和下降停值(表示上升時,若R(t)≤a,則R(t+1)不再上升;下降時,若 R(t)≤a′,則R(t+1)直接降為0)。當RH<0.5時,R(t+1)=R(t),不變。
3.3 感知信息融合算法
感知信息融合是合作式頻譜感知的難點和熱點。
3.3.1 簇內融合算法
這里簇內融合算法即gi=θ(αjΘi)的過程,采用線性加權的方法,即:

其中,j∈Si表示屬于 Si的所有 CR用戶;NRs>k是指該簇中 Rs>k的次用戶數;αj和 wj分別是其相應的發送感知結果和簇內融合權重;權重 wj是自私信譽度Rsj的函數,需要一個函數滿足圖2的要求。
本文使用指數函數:

取x=0.5,y=0.1,d=100,如圖2所示。
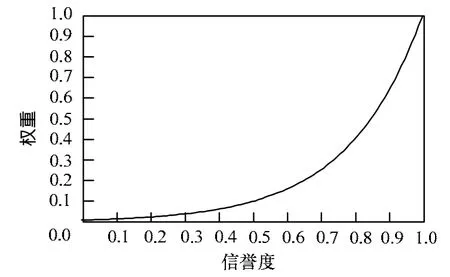
圖2 信譽度與權重函數
3.3.2 簇間融合算法

簇間融合算法,即最后總簇頭 C處 G=θ(fi)的過程。同樣地,使用線性加權有:其中,NRr>k是指 Rr>k的分地域數;fi和 βi分別是各簇相應的發送的感知結果和簇間融合權重。權重 βi是位置信譽度 Rri的函數,也可以使用簇內融合算法中的函數形式。這種函數表示當信譽很低時基本不影響融合結果,而當信譽度大于某一值后,信譽度越大,對融合結果影響越大。
4 仿真實驗
4.1 仿真環境
對以上提出的數據融合和合作感知機制進行仿真。在仿真中,一共有 N個次用戶隨機分布在一個2 000 m×2 000 m的方形區域里,在該區域中平均分成16個子區域。而主用戶離區域中心3 000m,且在區域7和8之間有一個建筑物,具體分布如圖3所示。在N個次用戶中,有Nm個惡意用戶,在這里針對檢測率,假設惡意用戶分別為“always-0(總是發送主用戶不存在)”和“random(隨機發送結果)”2種。每個次用戶在方形區域中的移動符合隨機移動模型[10],該模型參數為次用戶移動的最高速率是10 m/s,最大空閑時間是60 s。主用戶發送的信號是窄帶無線麥克風信號[8]。根據簡化的路徑損耗模型和陰影效應模型[11],得到次用戶接收到的信號模型。另外,在各個次用戶處的本地頻譜感知所采用的cav算法的參數為信號樣本量 Nw=50 000,信噪比為?20 dB,誤警率P =0.01。
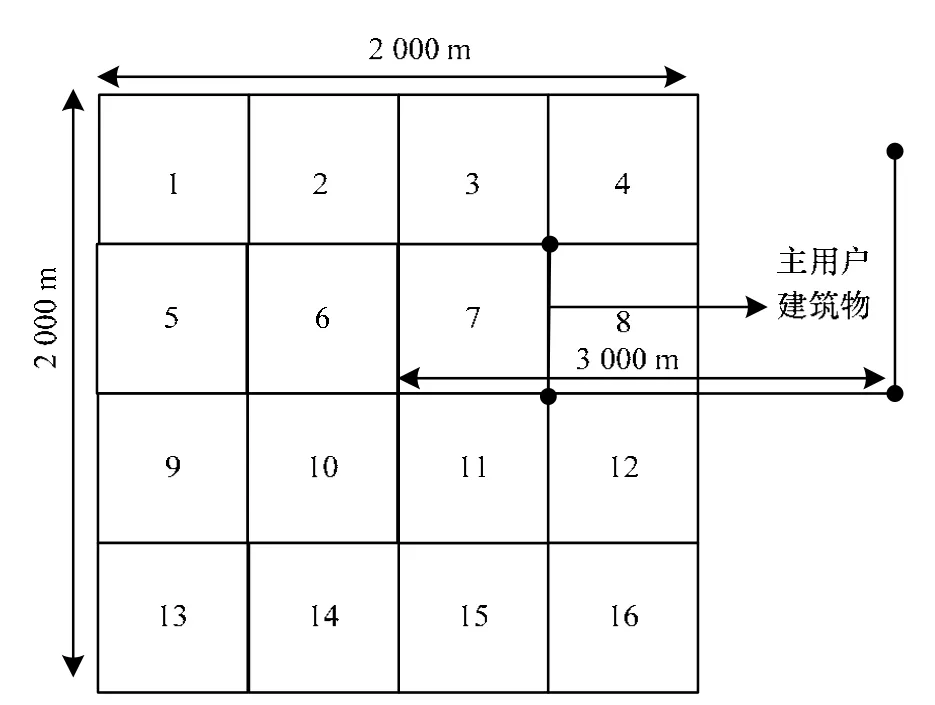
圖3 仿真布局
4.2 仿真結果
本節給出惡意用戶為“always-0”和“random”2種情況下,關于大多數原則(majority rules),傳統基于信譽度的頻譜感知算法(RBS)和本文提出的基于二重雙向信譽度的頻譜感知算法(DBRBS)的仿真結果。并設 N=500,Nm=130~190,一共進行 200次合作檢測。如圖 4所示,是惡意用戶為“always-0”情況下的檢測率情況。從圖中可以看到,隨著惡意用戶數的增加,3種算法的檢測率都是下降的。但是 DBRBS算法具有明顯的優勢,當Nm≤160時,DBRBS的檢測率都是在0.9以上的,具有較好的工作性能。而另外2種算法從Nm=130開始都沒有達到頻譜檢測中檢測率的標準。圖 5是惡意用戶為“random”情況下的檢測率,檢測率是隨著惡意用戶數的增加而降低,“RBS”和“majority rules”的檢測率相對接近,“RBS”性能更好些,本文提出的DBRBS算的性能仍然是優于另外2種算法。
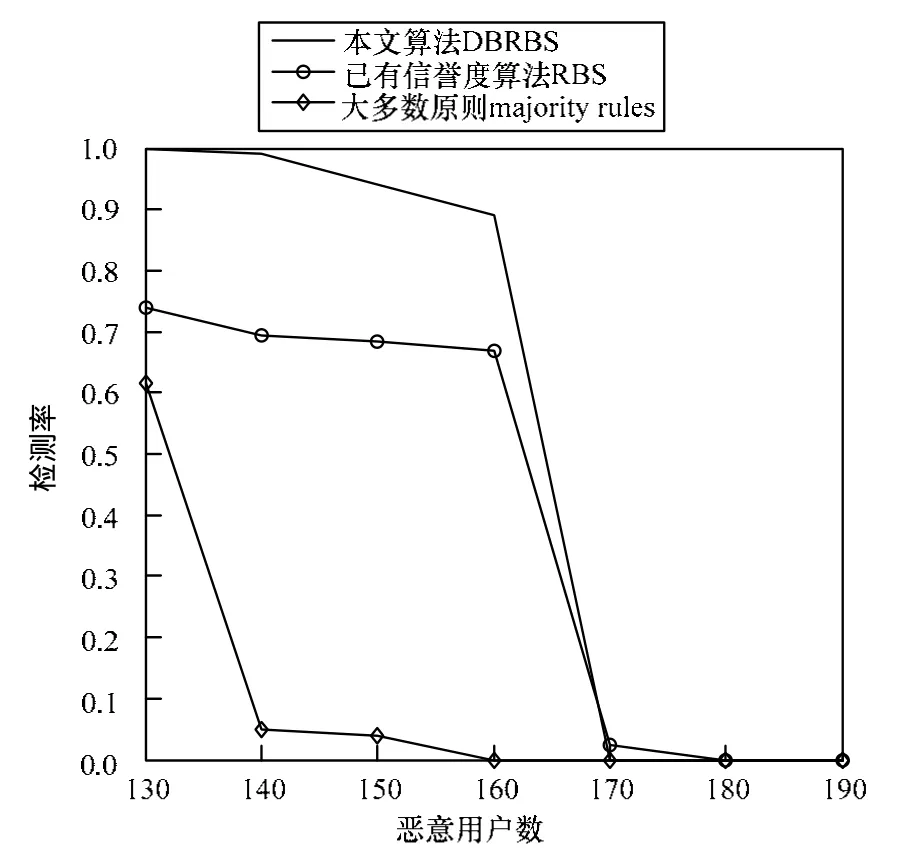
圖4 惡意用戶為always-0時的檢測率
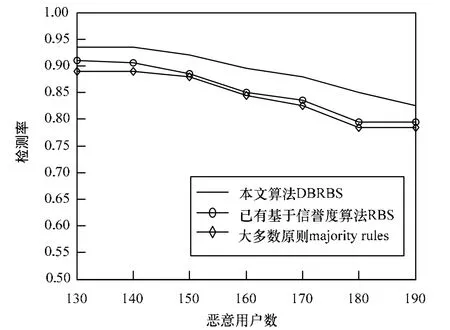
圖5 惡意用戶為random時的檢測率
另外,在計算“always-0”情況下,當 Nm=140時自私信譽度的各部分的均值。設R?p為 500個次用戶的自私信譽度的向量,取其前 140個數的均值時mean0~140=0.031 8,而后面的自私信譽度的均值為mean141~150=0.869 0。同樣的條件下,RBS算法中mean′0~140=0.02,mean′141~500=0.522 7。本文算法在前面惡意用戶的信譽度均值中比 RBS算法略高,但是整體信譽度更新更準確。
5 結束語
基于自私信譽度和位置信譽度,本文提出一種基于二重雙向信譽度的合作式頻譜感知算法,該算法較有效地解決了由于惡意用戶和復雜無線環境中的陰影效應及路徑損耗所導致的單用戶頻譜感知不準確的問題。實驗結果表明,該算法在復雜的無線環境中能夠較好地檢測到主用戶信號,具有較高的檢測率,并能較為準確地記錄自私信譽度和位置信譽度。本文使用的融合算法是硬融合算法,下一步工作將討論相應的軟融合算法在此系統中的應用。
[1]Mltola L, Maguire G Q.Cognitive Radio: Making Software Radios More Personal[J].IEEE Personal Communications, 1999, 6(4): 13-18.
[2]Yan Yanxin, Gong Yi.Energy Detection of Narrowband Signals in Cognitive Radio Systems[C]//Proc.of WCSP’10.Suzhou, China: [s.n.], 2010.
[3]Tandra R, Sahai A.SNR Wall for Signal Detection[J].IEEE Journal of Selected Topics in Signal Processing,2008, 2(1): 4-7.
[4]Tang Haiyun.Some Physical Layer Issues of Wide-band Cognitive Radio Systems[C]//Proc.of the 1st IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks.Baltimore, USA: IEEE Computer Society, 2005: 151-159.
[5]Ghozzi M, Marx F, Dohler M, et al.Cyclostationarity Based Test for Detection of Vacant Frequency Bands[C]//Proc.of Cognitive Radio Oriented Wireless Networks and Communication Conference.Mykonos, Island: [s.n.],2006.
[6]Chen Ruiliang, Park J M, Bian K G.Robust Distributed Spectrum Sensing in Cognitive Radio Networks[C]//Proc.of the 27th Conference on Computer Communications.Phoenix, America: [s.n.], 2008.
[7]金 煦.認知無線電中的合作頻譜感知技術研究[D].杭州: 浙江大學, 2010.
[8]Zeng Yonghong, Liang Yingchang.Spectrum-sensing Algorithms for Cognitive Radio Based on Statistical Covariances[J].IEEE Transactions Vehicular Technology,2009, 58(4): 1804-1815.
[9]Sun Chunhua, Zhang Wei, Letaief K B.Cluster-based Cooperative Spectrum Sensing in Cognitive Radio Systems[C]//Proc.of IEEE International Conference on Communications.[S.1.]: IEEE Press, 2007.
[10]Bettstetter C, Resta G, Santi P.The Node Distribution of the Random Waypoint Mobility Model for Wireless Ad Hoc Networks[J].IEEE Transactions on Mobile Computing, 2003, 2(3): 257-269.
[11]Rappaport T S.無線通信原理與應用[M].周文安, 付秀花,王志輝, 譯.北京: 電子工業出版社, 2006.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12