滑動聚束SAR波束控制研究與設(shè)計
2013-09-30 01:38:16常文勝劉愛芳尹奎英
火控雷達(dá)技術(shù) 2013年3期
常文勝 劉愛芳 尹奎英
(南京電子技術(shù)研究所 南京 210013)
0 引言
在合成孔徑雷達(dá)成像中,條帶SAR模式與聚束SAR模式是兩種最常用的模式。條帶SAR在成像過程中波束中心線與雷達(dá)運動軌跡的夾角保持不變,可以隨飛行平臺的運行連續(xù)地進(jìn)行條帶成像,其成像區(qū)域在方位向幾乎不受限制,成像區(qū)域中的散射點和雷達(dá)之間的連線與雷達(dá)運動軌跡之間的夾角的改變?yōu)樘炀€3dB波束寬度,因此其方位向分辨率受限于天線3dB波束寬度;聚束SAR在成像過程中,控制波束始終跟蹤成像區(qū)域的中心,成像區(qū)域中的散射點和雷達(dá)之間的連線與雷達(dá)運動軌跡之間的夾角可以改變很大,不受雷達(dá)波束寬度影響,因此可以實現(xiàn)較高的方位向分辨率,但方位成像區(qū)域僅限于方位向波束寬度。滑動聚束SAR[1]是應(yīng)方位向高分辨率大區(qū)域SAR成像提出來的,在成像過程中,雷達(dá)波束始終照射遠(yuǎn)離成像區(qū)域的某個虛擬的焦點[2],因而雷達(dá)波束在成像區(qū)域的方位向上以低于雷達(dá)方位向移動速度的速度移動,其虛擬焦點距離成像區(qū)域的遠(yuǎn)近對方位向分辨率和成像區(qū)域的大小有很大關(guān)系,是介于條帶SAR模式與聚束SAR模式之間的一種工作模式,當(dāng)虛擬焦點處于場景中心時,退化為聚束SAR模式,當(dāng)虛擬焦點處于無窮遠(yuǎn)(實際上為地球球心)時,退化為條帶SAR模式。由于滑動聚束SAR實際上是對一虛擬焦點進(jìn)行聚束,因此本文首先分析了聚束SAR的波束控制,指出滑動聚束SAR的波束控制實際上等同于聚束SAR,關(guān)鍵是確定其虛擬焦點到場景中心線的垂直距離;接下來結(jié)合滑動聚束SAR的成像幾何,詳細(xì)分析了虛擬焦點固定的情況下,成像區(qū)域中各散射點分辨率的變化以及虛擬焦點到場景中心線的遠(yuǎn)近對分辨率的影響,然后給出了在已知方位向分辨率與聚束起始時刻波束中心線與雷達(dá)運動軌跡夾角時,虛擬焦點到場景中心垂直距離的計算公式,最后結(jié)合0.3m分辨率SAR機(jī)械掃描天線和相控陣掃描天線對虛擬焦點到場景中心的垂直距離,成像區(qū)域的大小進(jìn)行了計算。
1 聚束SAR模式的波束控制
如圖1所示,設(shè)飛機(jī)從A點開始轉(zhuǎn)入聚束模式,波束中心線與天線法向平面的夾角為θ0,當(dāng)飛機(jī)運行tm時間后,應(yīng)控制波束,使波束中心線與天線法向平面的夾角變?yōu)棣龋蓤D1幾何關(guān)系可得

式中,S為 RBtan(θ0)。
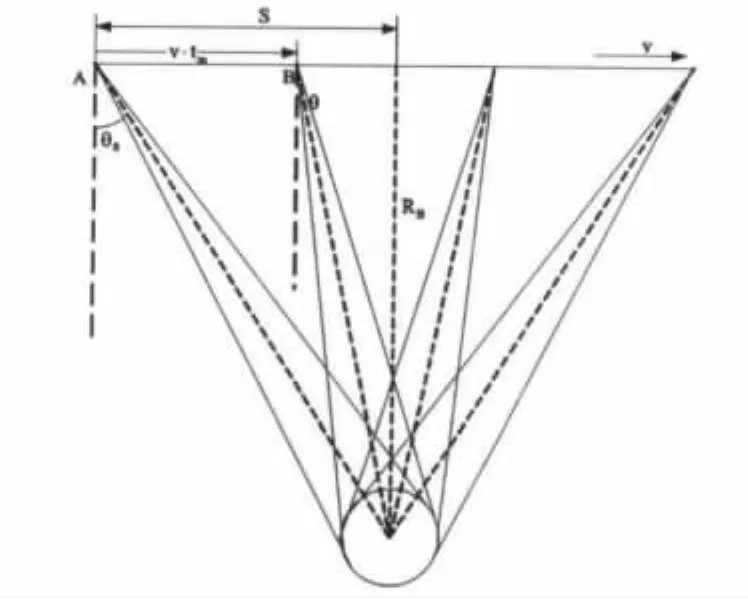
圖1 聚束SAR波束轉(zhuǎn)動示意圖
2 滑動聚束SAR的波束控制
2.1 虛擬焦點到場景中心的垂直距離與滑動聚束SAR波束控制的關(guān)系
如圖2(a)所示,滑動聚束SAR相當(dāng)于對地表下虛擬焦點O進(jìn)行聚束[3],RB為場景中心到航線的垂直距離,只要能夠確定虛擬焦點O到場景中心P的距離R',將式(1)中的RB替換為RB+R'即為滑動聚束SAR的波束控制角。
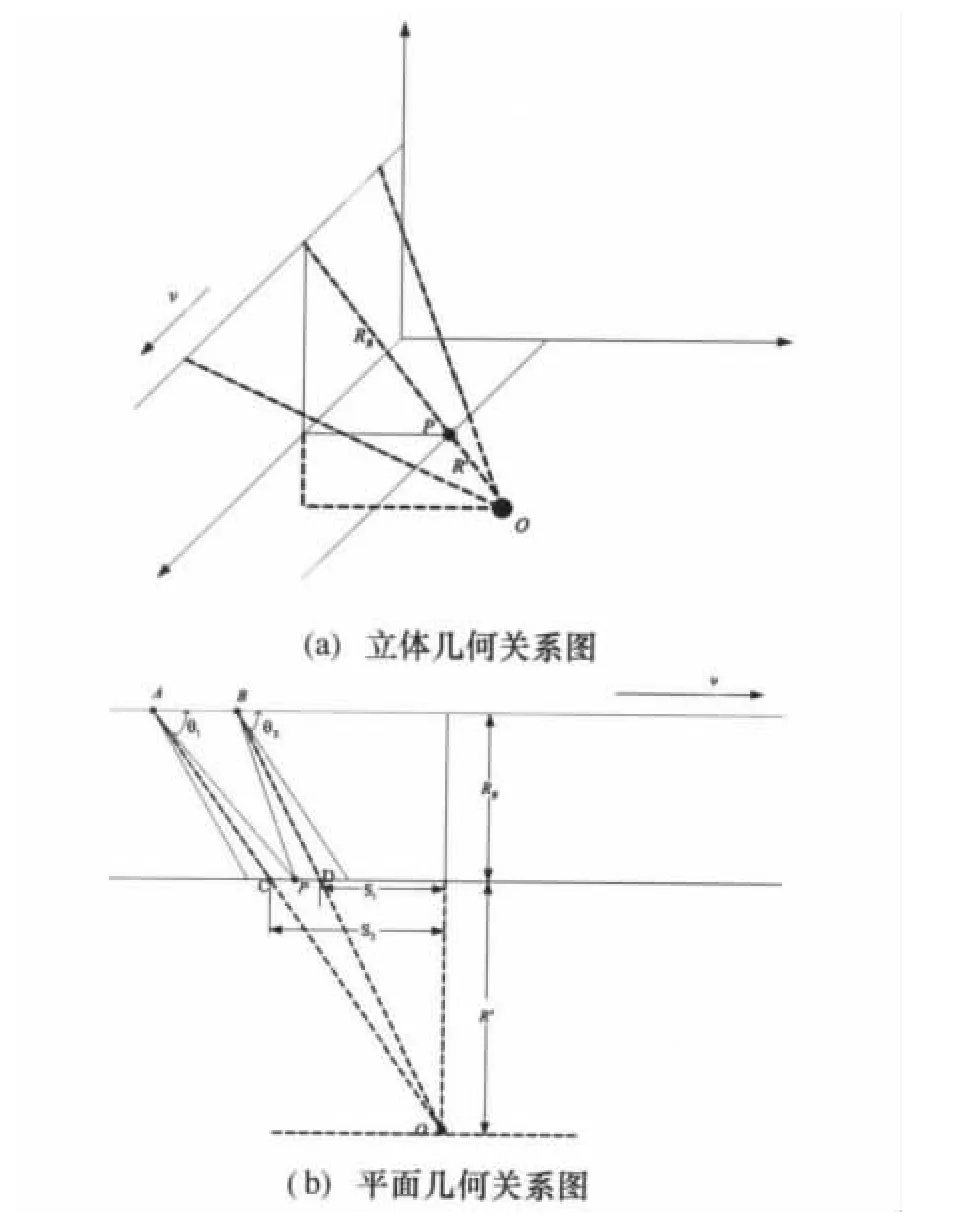
圖2 滑動聚束SAR的成像幾何
2.2 虛擬焦點到成像區(qū)域中心的距離與方位分辨率的關(guān)系
R'的取值并不是任意的,它與方位向分辨率有著直接的關(guān)系。取兩個極限,若R'為零,此時滑動聚束SAR即為聚束SAR,若R'為地球半徑,此時滑動聚束SAR退化為條帶SAR,R'越大,分辨率越低,R'越小,分辨率越高。下面來推導(dǎo)R'確定的情況下的地面成像區(qū)域內(nèi)的方位向分辨率。圖2(b)為滑動聚束SAR斜距平面內(nèi)的成像幾何關(guān)系圖,如圖所示,當(dāng)雷達(dá)運動到A點時,地面上的目標(biāo)點P剛好進(jìn)入波束,此時雷達(dá)飛行方向與波束中心線的夾角為θ1,此時目標(biāo)點P對應(yīng)的多普勒頻率f1為
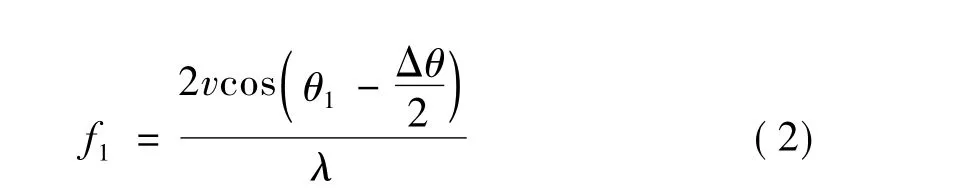
式中,v為雷達(dá)平臺的運行速度;Δθ為3dB波束寬度;λ為載波波長。當(dāng)飛機(jī)運行到B點時,波束后沿剛好離開目標(biāo)點P,目標(biāo)點的多普勒頻率f2為

則成像區(qū)域內(nèi)目標(biāo)點P的方位向分辨率ρa為

由式(2)、(3)、(4)可知在已知 θ1、R'的前提下確定P點的分辨率,關(guān)鍵在于確定求解 θ2,由圖2(b)幾何關(guān)系可知:
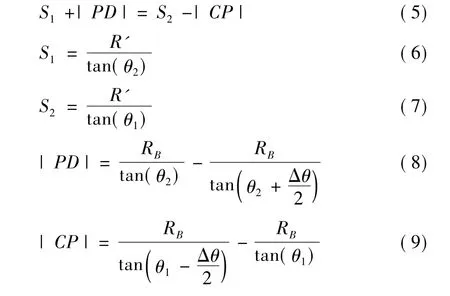
根據(jù)公式(5)、(6)、(7)、(8)、(9)可以通過數(shù)值解將θ2解出來,代入公式(4)就可以確定該點的分辨率。設(shè)虛擬聚焦點到地表的距離為R'為25km,RB為50km,波長λ為0.03m,計算θ1從30°變化到150°,波束寬度Δθ為3.6°地面成像區(qū)內(nèi)目標(biāo)點的分辨率,如圖3所示。
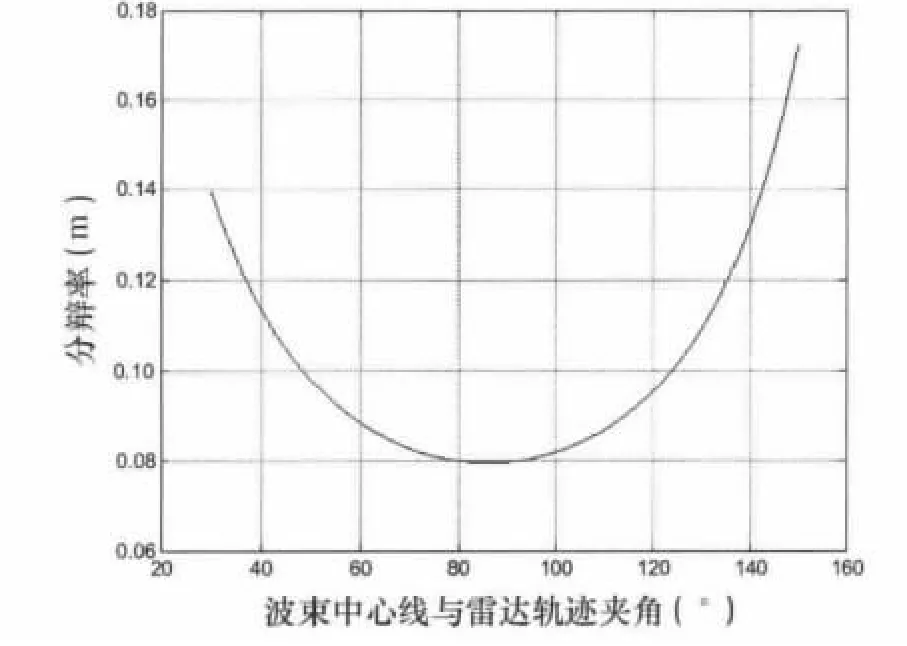
圖3 目標(biāo)散射點分辨率隨波束中心線與雷達(dá)運動軌跡夾角的變化曲線
從圖3中可知分辨率隨著波束中心線與雷達(dá)運動軌跡夾角的變化而變化,在角度θ1為86.4°時分辨率達(dá)到最高。圖4是R'從20km變化到200km時,分辨率的二維曲面示意圖,可知隨著距離R'的增加分辨率降低。
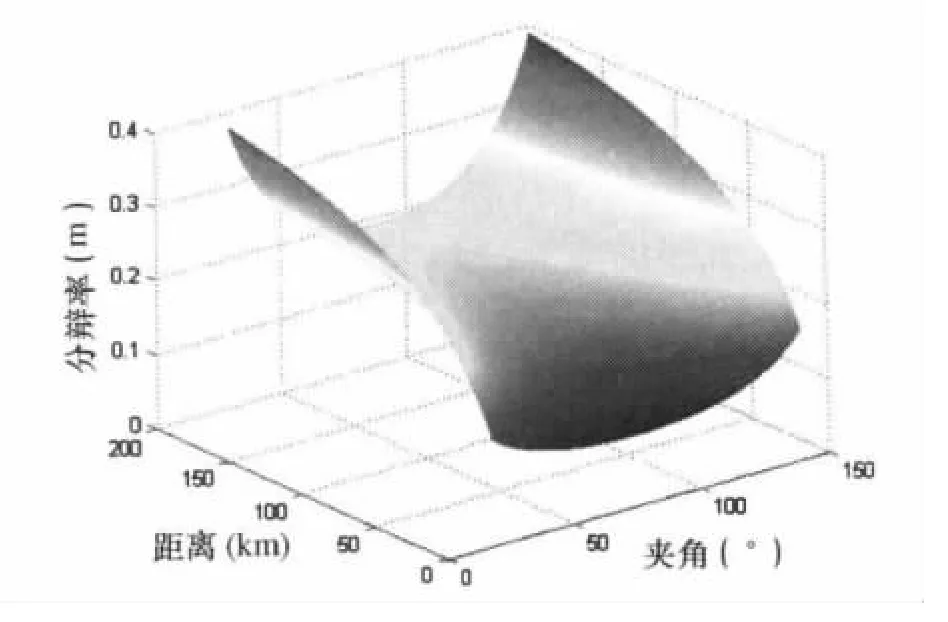
圖4 方位向分辨率隨虛擬焦點距離與夾角角度變化的二維曲面
2.3 根據(jù)方位向分辨率確定虛擬焦點到場景中心的距離
實際上在進(jìn)行波束控制設(shè)計時,常通過分辨率來確定虛擬焦點到場景中心的距離。設(shè)方位向分辨率為ρa,則達(dá)到該分辨率所需的最小多普勒帶寬[4]Ba為

如圖2(b)所示,P是成像區(qū)域一目標(biāo)點,當(dāng)雷達(dá)運動到A點時,剛好進(jìn)入波束,波束中心線與雷達(dá)運動軌跡的夾角為θ1,對應(yīng)的多普勒頻率為f1,當(dāng)雷達(dá)運動到B點時,對應(yīng)的多普勒頻率f2為

據(jù)(3)式有

計算得到θ2后,據(jù)(5)式有

由圖4知方位向分辨率隨著R'的減小而提高,因此根據(jù)公式(13)計算得到的R'實際上是虛擬聚焦點到場景中心的最大值。
考慮正側(cè)視滑動聚束,如圖5所示,即若起始聚束角為α,其終止聚束角為β=180°-α,則滑動聚束SAR在地面上的照射距離L為

考慮到聚束起始角α的波束前沿內(nèi)和聚束終止角β的波束后沿內(nèi)的點無法完全聚焦,因此實際上在聚束期間能夠完全聚焦的照射距離L'為

式中
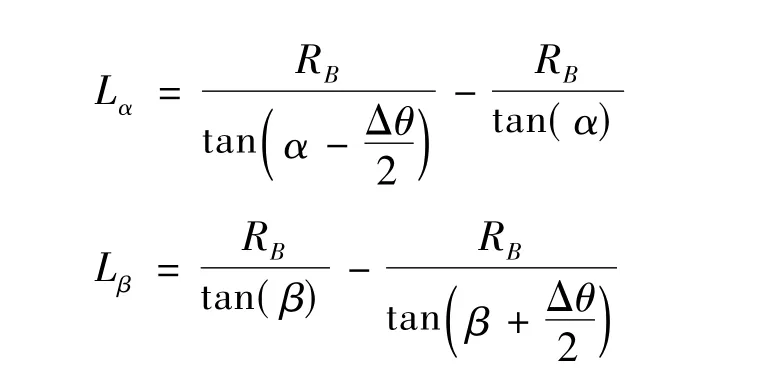

圖5 正側(cè)視滑動聚束方位向照射距離示意圖
3 滑動聚束SAR波束控制設(shè)計示例及試驗圖像
設(shè)計一個方位向分辨率ρa為0.3m的滑動聚束SAR系統(tǒng),場景中心到雷達(dá)的垂直斜距離RB為35km,3dB波束寬度Δθ為3°,天線方位向尺寸d為0.8m,脈沖重復(fù)頻率PRF為1000Hz,要求滑動聚束期間對地面的照射面積最大。
要求最終SAR圖像的方位向分辨率為0.3m,考慮到在成像過程中需要加權(quán)降低副瓣引起主瓣展寬的影響,設(shè)主瓣展寬系數(shù)為1.47,實際需要達(dá)到的分辨率為0.20m。利用公式(11)~(13)計算聚束起始角α為30°~150°所要求的虛擬焦點到場景中心垂直距離R'的曲線如圖6所示。
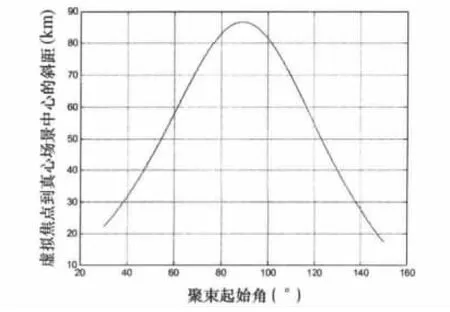
圖6 虛擬焦點到場景中心的垂直距離與聚束起始角的關(guān)系曲線
考慮正側(cè)視滑動聚束,由公式計算(15)得到在滑動聚束期間能夠完全聚焦的方位向照射距離與聚束起始角的關(guān)系曲線見圖7。
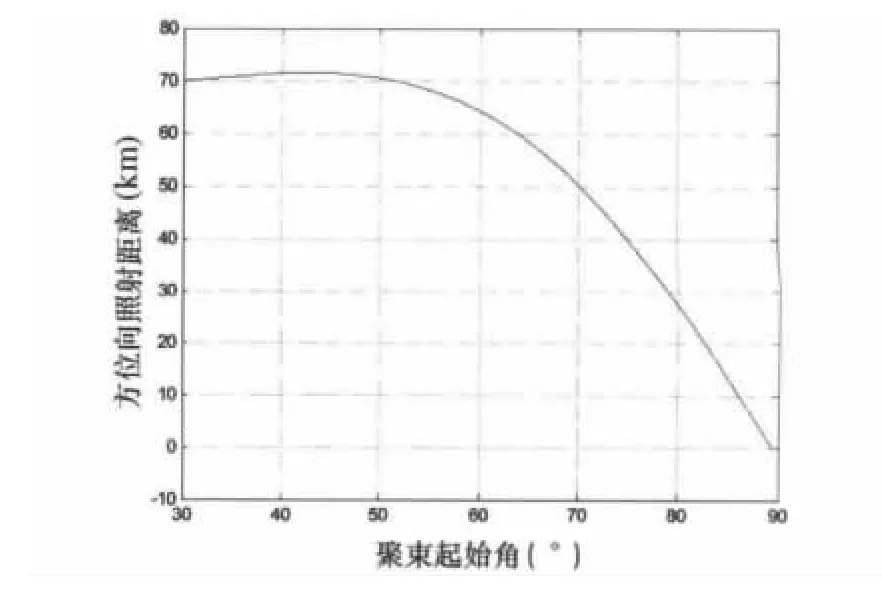
圖7 正側(cè)視滑動聚束方位照射距離與聚束起始角的關(guān)系曲線
由圖7可知,當(dāng)起始聚束角為42.8°時,方位向照射距離最大,為71.47km,對應(yīng)的R'為34.84km。
圖8為0.3m分辨率滑動聚束SAR模式在運七飛機(jī)上的試驗圖像,驗證了本文設(shè)計的滑動聚波束SAR模式波束控制的正確性。

圖8 滑動聚束SAR試驗圖像
[1]D.P.Belcher and C.J.BaKer High resolution processing of hybrid strip-map/spotlight mode SAR[J].IEE Proc.-Radar,Sonar Navig.,1996,143(6):366-374.
[2]張濤,洪香茹等.混合條帶/聚束模式SAR的信號處理[C].CSAR-2005會議,2005:253-259.
[3]Mittermayer,J.,Lord,R.,Borner,E.Sliding Spotlight SAR Processing for TerraSAR-X using a New Formulation of the Extended Chirp Scaling Algorithm[C].IEEE International Geoscience and Remote Sensing Symposium,2003:1462-1464.
[4]保錚,邢孟道,王彤.雷達(dá)成像技術(shù)[M].電子工業(yè)出版社,2005.4.
[5]張光義,趙玉潔.相控陣?yán)走_(dá)技術(shù)[M].電子工業(yè)出版社,2006.12.
