基于FPGA的SVPWM算法在變頻調速中的實現
2013-10-14 11:01:18褚福領李志剛高子龍
機械制造與自動化 2013年4期
褚福領,李志剛,高子龍
(南京理工大學機械工程學院,江蘇南京 210094)
0 引言
隨著電氣傳動系統對其控制性能的要求不斷提高,人們對PWM控制技術展開了深入的研究。從最初追求電壓正弦波到電流正弦波,再到磁通正弦,PWM控制技術進行了不斷的創新和完善。在此,對空間矢量PWM(SVPWM)進行了分析。SVPWM是一種更優化的PWM技術,與傳統SPWM技術相比,具有控制算法簡單,數字化實現方便,電壓利用率高,諧波成分少等優點,因此有取代SPWM的趨勢[1]。為了滿足SVPWM算法的高性能,常常需要將控制周期縮短到幾百微秒,甚至幾十微秒之內。然而,普通單片機已無法滿足要求。FPGA以其高性能的運行速度,理所當然地被用于SVPWM及交流調速控制場合。SVPWM物理概念清晰,算法簡單,易于使用FPGA器件采用數字的方式實現。本文介紹了SVPWM的基本原理、算法以及基于FPGA的實現,并給出了仿真波形的實驗結果,有一定的工程實現價值。
1 空間矢量脈寬調制(SVPWM)原理
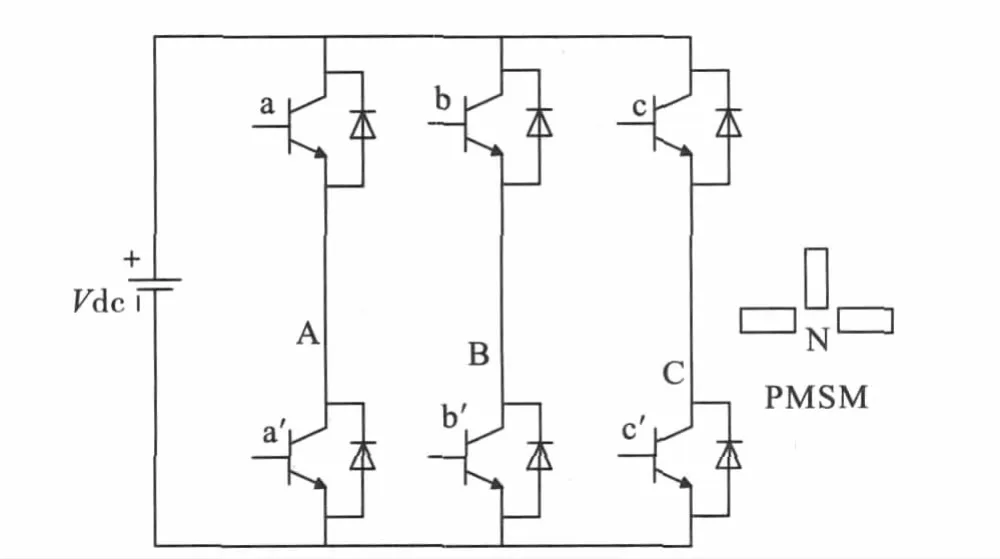
圖1 電壓型逆變器主電路
圖1為電壓型逆變器結構簡圖,每一個橋臂有上下兩個開關器件,同一橋臂的兩個開關器件不能同時導通。若規定每個橋臂上橋臂導通且下橋臂關斷為“1”,而下橋臂導通且上橋臂關斷為“0”,三組開關共有8種可能的開關組合,如表1所示。
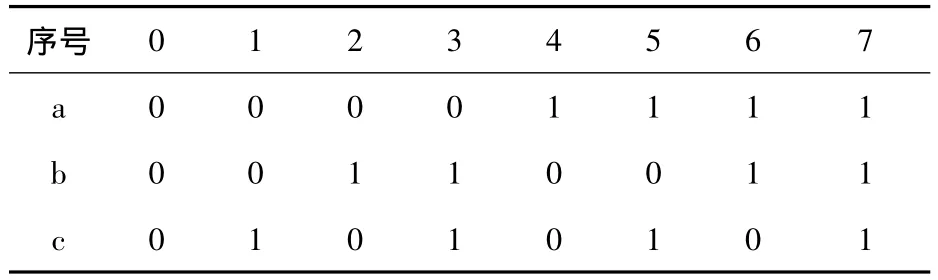
表1 電壓型逆變器8種基本開關狀態表
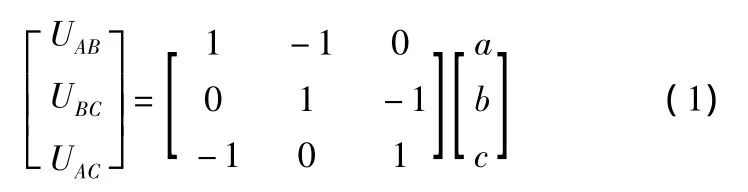
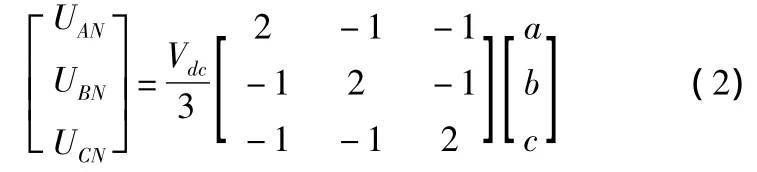
根據式(1)、(2)可知逆變器開關狀態和電壓之間關系,如表2所示。
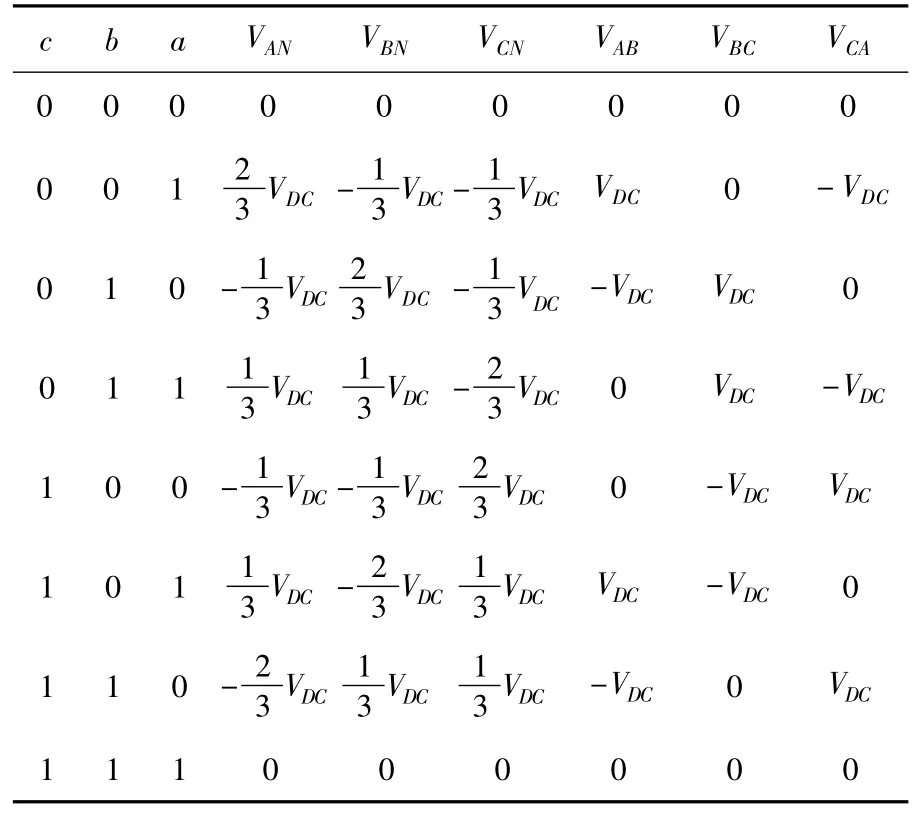
表2 逆變器開關狀態和三相電動機瞬態電壓關系
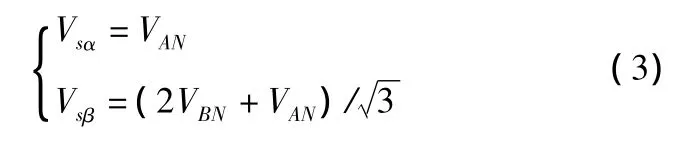
三相定子電壓通過Clarke變換,可得靜止坐標系下的α 軸、β 軸電壓分量[2]:
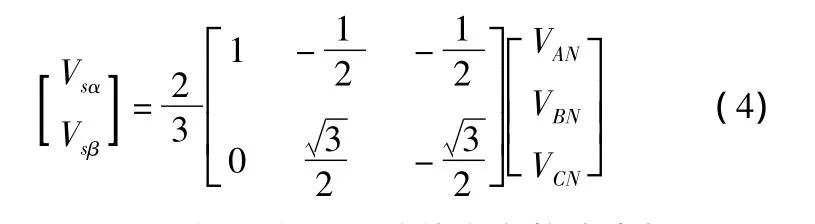
由于VCN=-(VAN+VBN),將上式轉換成矩陣形式:
由式(3)、(4)可知逆變器開關狀態和靜止坐標下(α,β)電壓之間關系,如表3所示。
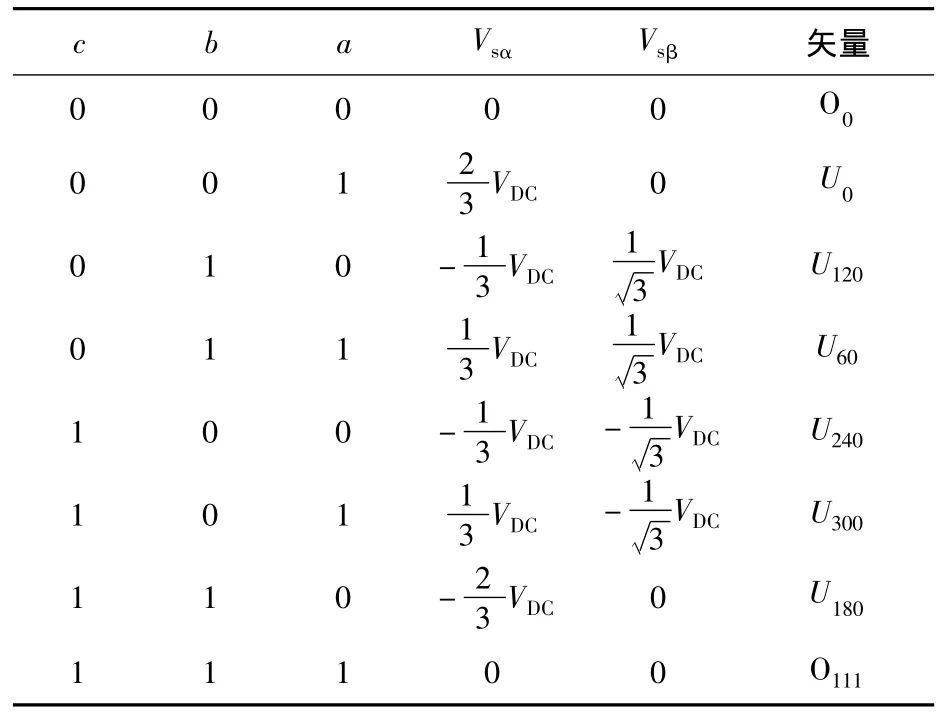
表3 開關狀態、相電壓(α,β坐標系)、空間矢量關系
2 控制算法
由前一節介紹可知SVPWM技術主要是通過調節開關狀態得到相應的基本空間矢量,迫使接近給定定子參考電壓矢量UOUT。要實現SVPWM必須先判斷參考電壓矢量UOUT所在的扇區;再計算開關電壓矢量的作用時間;最后確定開關順序。
2.1 判斷空間矢量UOUT所處扇區
輸出電壓矢量UOUT可以用相鄰電壓矢量在(α,β)坐標下的分量Ualfa和表示Ubeta,以第一象限為例,其矢量表示如圖2:
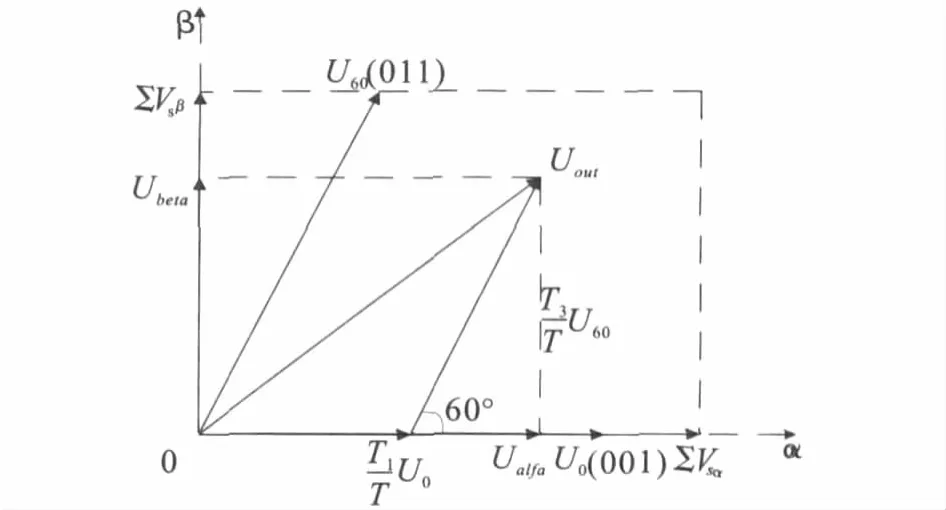
圖2 參考電壓投影圖
式中:ΣVsβ代表基本電壓矢量U0和相鄰基本電壓矢量U60在β軸電壓分量之和,ΣVsα代表基本電壓矢量U0和相鄰基本電壓矢量U60在α軸電壓分量之和。可以通過改進的Clarke逆變換將靜止坐標系下的α軸、β軸電壓分量變換為三相平衡分量Vref1,Vref2,Vref3。
根據下面的比較分析,可以決定空間矢量所處的扇區:
定義A、B、C三個變量。如果Vref1>0則A=1,否則A=0;如果Vref2>0則B=1,則B=0;如果Vref3>0則C=1,否則C=0,則空間矢量所在扇區可表示為N=A+2B+4C。
根據扇區與N值的對應關系表確定扇區號,如表4所示。

表4 N值與扇區對應關系
2.2 計算非零電壓矢量作用時間
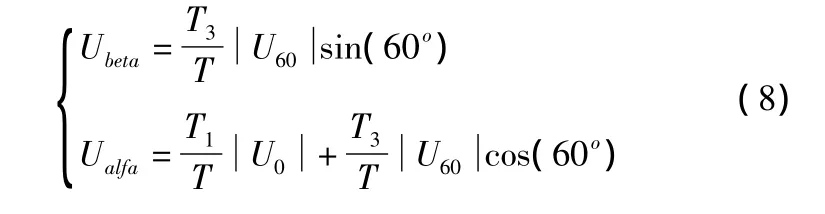
從圖2電壓矢量圖可以知道,輸出電壓矢量Uout處于U0和U60所夾的扇區,因此,輸出電壓矢量Uout可以用電壓矢量U0和電壓矢量U60表示。所以可以得到如下等式:
式中:T1,T3分別代表電壓空間矢量U0和U60導通時間,T代表Uout的作用時間,T0代表零矢量導通時間,導通時間可以用式(8)表示:
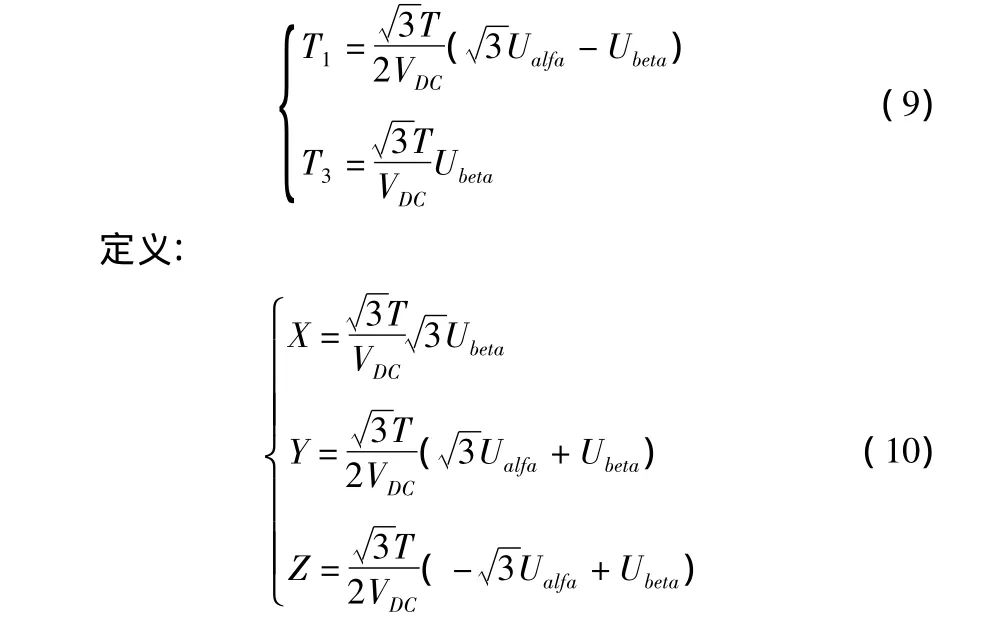
那么對于第一象限的空間矢量的導通時間可表示為:T1=-Z,T3=X。同理,當Uout在其他扇區時,相應的導通時間T1、T2也可用X、Y、Z表示,它們的對應關系如表5所示。
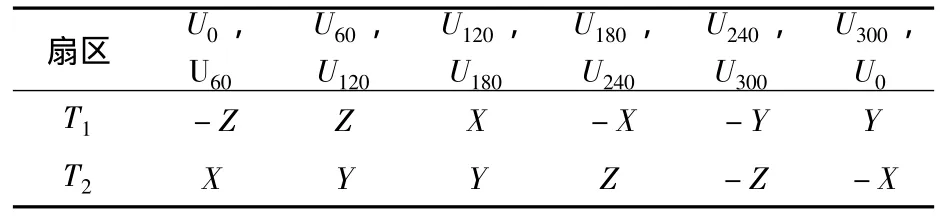
表5 T1、T2與X、Y、Z之間的對應關系
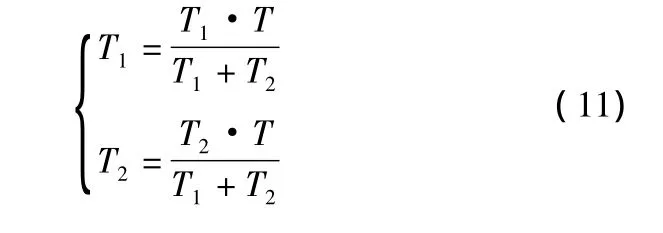
對作用時間還應進行飽和判斷[3],當T1+T2>T時,經過式(11)計算飽和判斷后的T1、T2:
2.3 計算各相上橋臂開關管導通時刻
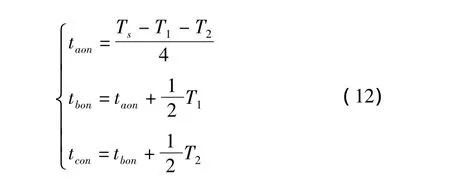
式中Ts為PWM的周期,電壓矢量切換點Ta,Tb,Tc與扇區的對應關系如表6所示。
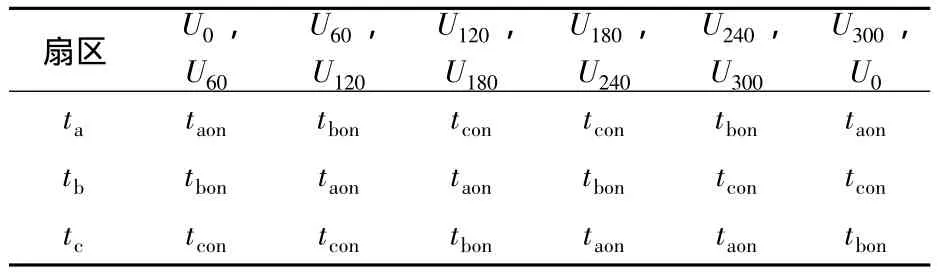
表6 電壓矢量切換點與扇區對應關系間的對應關系
3 伺服驅動控制器硬件設計
伺服驅動控制器總體電路原理圖如圖3所示:
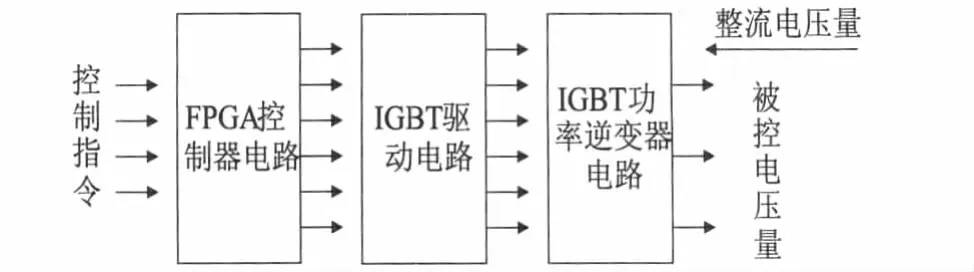
圖3 伺服驅動控制器總體電路原理圖
在FPGA控制器電路中,FPGA芯片選擇CycloneⅡ系列中的EP2C8Q208C8N型號。并配置相應的最小系統功能必需的核心器件,如表7所示:
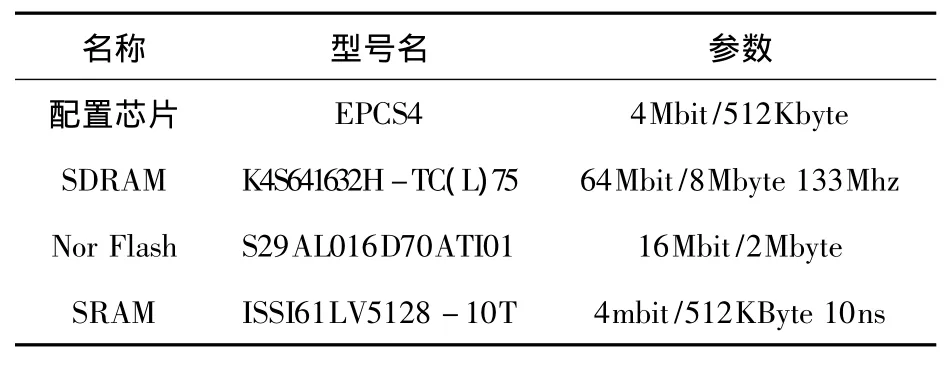
表7 最小系統配置核心器件表
功率逆變器的IGBT的柵極驅動控制端工作在-5 V~15 V區間,故需要設計功率逆變器驅動控制電路來實現FPGA控制器和功率逆變器之間銜接。
4 軟件設計與實驗結果
將前述的各個模塊加上分頻模塊連接起來構建出電壓空間矢量脈寬調制總體設計,在FPGA中實現的總體構成如圖4所示:
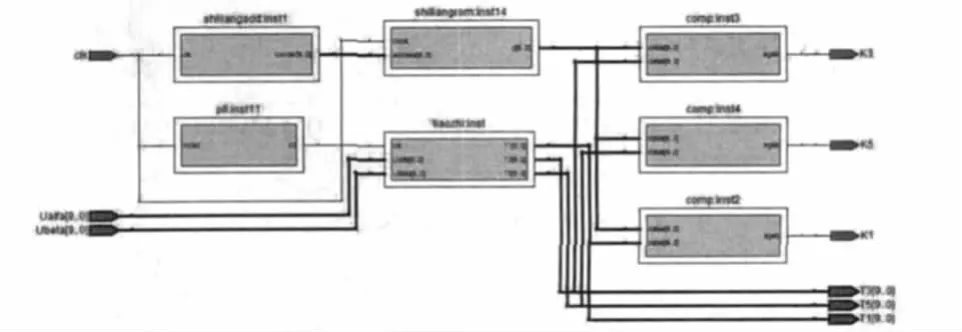
圖4 電壓空間矢量脈寬調制FPGA實現的總體構成圖
對于電壓空間矢量脈寬調制變頻控制,在數字實現時,依據標準IGBT開關的動作頻率為10 kHz,對每個三角波周期采用采樣頻率為20 MHz的數字采樣構建三角波[5]。三角載波模塊FPGA實現原理如圖5所示:
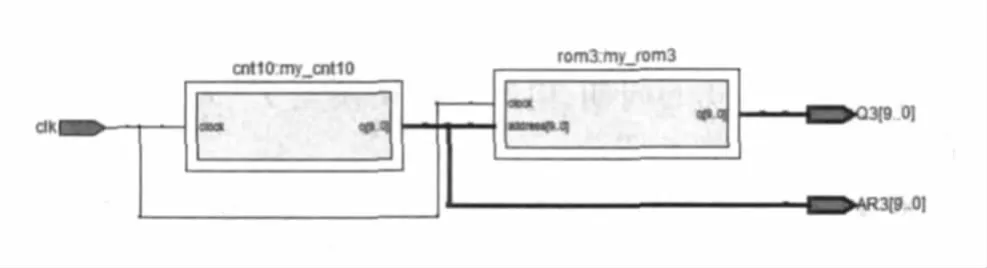
圖5 三角載波模塊FPGA實現原理圖
在FPGA中實現當前電壓矢量Uout處于不同扇區時,各相上橋臂開關管S1,S3,S5的脈沖驅動控制信號重構的功能仿真如圖6所示:

圖6 各相上橋臂開關管驅動控制信號重構FPGA實現的功能仿真圖
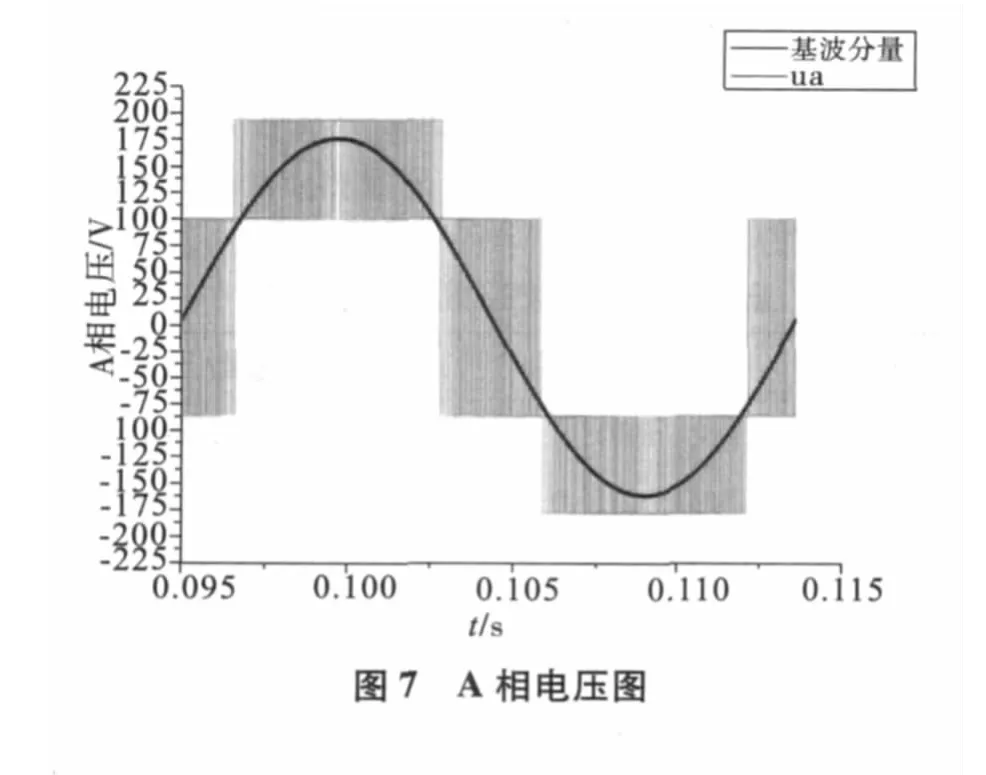
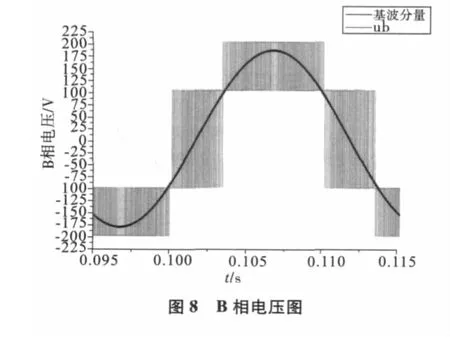
將驅動脈沖控制信號作用的功率逆變驅動控制電路,進而驅動功率逆變器,在輸入整流直流電壓為300 V時,輸出相應的相電壓,相電流如圖7—圖10所示:
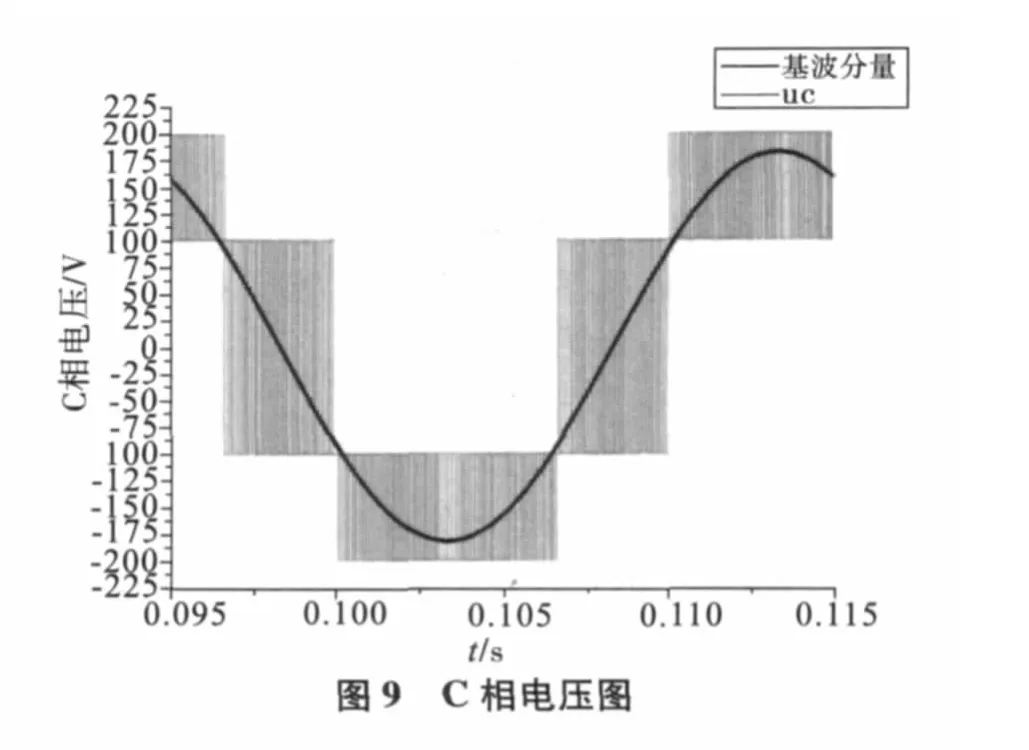
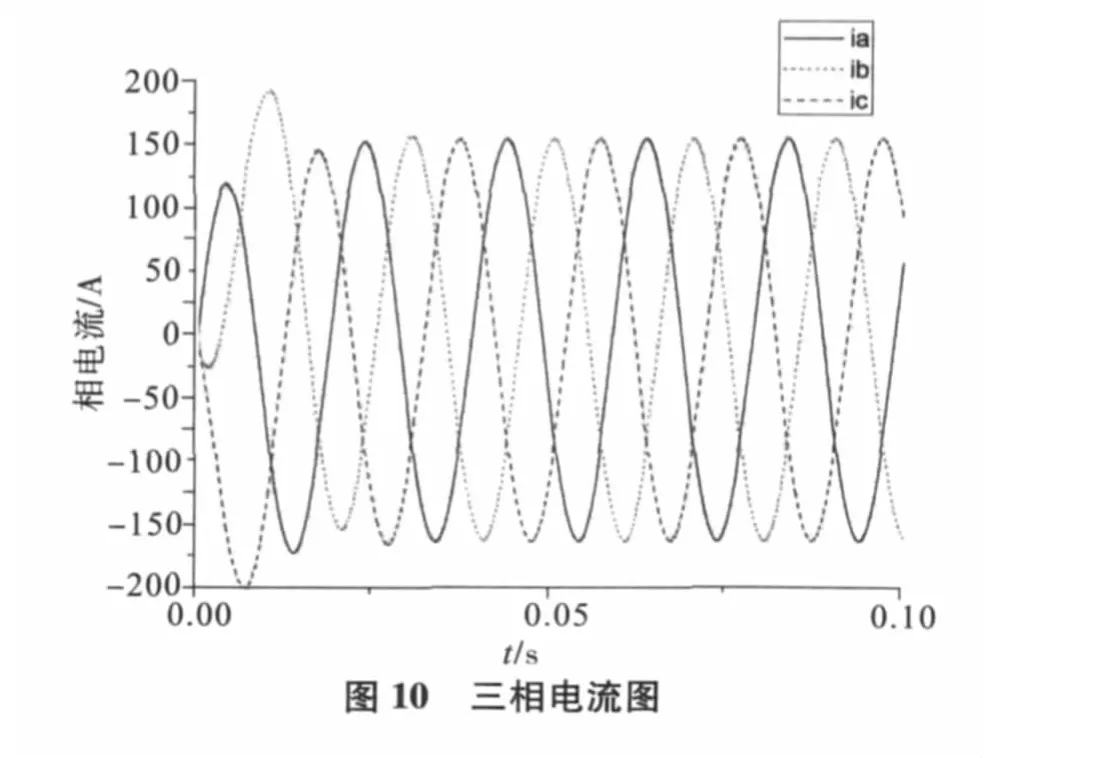
5 結論
從圖7—圖10可以得出,各相電壓中的基波分量與期望輸出的三相正弦相電壓頻率、相位相一致;相電壓和相電流存在諧波畸變,對上述得到A相輸出電壓進行快速傅里葉變換的得到其諧波分析如圖11所示:

圖11 電壓空間矢量脈寬調制輸出A相電壓諧波分析圖
在最高頻率為3 000 Hz時,A相輸出的相電壓的基波幅值為181.3 V,THD為46.05%,A相輸出的相電壓流的THD為4.93%。電壓空間矢量脈寬調制的線電壓的基波幅值為300 V,與理論的分析相一致,直流電壓利用率為100%。
故由以上分析可得,電壓空間矢量脈寬調制具有很高的利用率,作為接收對數字PI控制器的電壓信號的變頻控制方式,可以使得PMSM具備更高的控制精度和更好的能源利用率,SVPWM算法不僅易于數字化實現,便于實時控制,而且直流電壓利用率高,控制性能好。
[1]寇保泉,程樹康 .交流伺服電機及其控制[M].北京:機械工業出版社,2008:45-50.
[2]郭慶鼎,孫宜標,王麗梅.現代永磁電動機交流伺服系統[M].北京:中國電力出版社,2006:63-73.
[3]何杰,王家軍.基于SVPWM的永磁同步電機系統建模與仿真[J].機電工程,2009,26(7):77-88.
[4]祁超,王慶章,趙耀,等.基于F P G A的三相SV P W M調制算法的實現[J].南開大學學報(自然科學版),2011,4(44):28-29.
[5]鄭飛,費樹岷,周杏鵬,等.基于DSP和FPGA的SVPWM算法及其在變頻調速中的應用[J].電力自動化設備,2010,11(30):61-63.
