基于MATLAB的雙饋電機(jī)仿真
2013-10-24 08:54:02王培炎
中國校外教育 2013年31期
關(guān)鍵詞:發(fā)電機(jī)模型
◆王培炎
(內(nèi)蒙古北方重工培訓(xùn)中心)
一、雙饋發(fā)電機(jī)的基本原理
隨著電力電子技術(shù)和數(shù)字控制技術(shù)的迅速發(fā)展,人們在不斷尋求采用新的途徑解決電力系統(tǒng)穩(wěn)定和無功問題的時候,提出了采用交流勵磁發(fā)電機(jī)取代或部分取代常規(guī)同步發(fā)電機(jī)的設(shè)想,并已由理論到實(shí)踐取得了一些成果。這種發(fā)電機(jī)的轉(zhuǎn)子繞組由原來的直流勵磁繞組改為三相對稱交流勵磁繞組。當(dāng)通以某一額定頻率(fc)的交流電時,就會產(chǎn)生一個相對轉(zhuǎn)子旋轉(zhuǎn)的磁場,其轉(zhuǎn)速為:n=(np為極對數(shù)),轉(zhuǎn)子實(shí)際轉(zhuǎn)速加上交流勵
磁產(chǎn)生的旋轉(zhuǎn)磁場的轉(zhuǎn)速(方向可以相同或相反)等于同步轉(zhuǎn)速,即:n1=nr±n2。
由此在電機(jī)氣隙中形成一個同步旋轉(zhuǎn)的磁場,在定子側(cè)感應(yīng)出同步速的感應(yīng)電勢。從定子側(cè)看,這與直流勵磁的轉(zhuǎn)子以同步速旋轉(zhuǎn)時,在電機(jī)氣隙中形成一個同步旋轉(zhuǎn)的磁場是等效的。如果按電機(jī)轉(zhuǎn)子的轉(zhuǎn)速是否與同步轉(zhuǎn)速一致來區(qū)分異步發(fā)電機(jī)或同步發(fā)電機(jī)。則交流勵磁發(fā)電機(jī)應(yīng)當(dāng)被稱為異步發(fā)電機(jī)。但是,從性能來看,交流勵磁發(fā)電機(jī)很多地方又與同步發(fā)電機(jī)相似。
二、定子磁鏈定向的矢量控制
在交流勵磁發(fā)電機(jī)中,考慮到發(fā)電機(jī)始終是在工頻50Hz下運(yùn)行,在這樣的頻率下,通常電機(jī)定子繞組的電阻可以忽略不計(jì)。此時,定子繞組總磁鏈與定子電壓的矢量之間的相位正好相差90度,因此在實(shí)際應(yīng)用中,以定子電壓矢量或者以定子繞組總磁鏈為參考矢量,可使控制系統(tǒng)變得相對簡單。
采用定子磁鏈定向,同步轉(zhuǎn)速n1旋轉(zhuǎn)的坐標(biāo)軸d與定子磁鏈ψs相重合,則有:
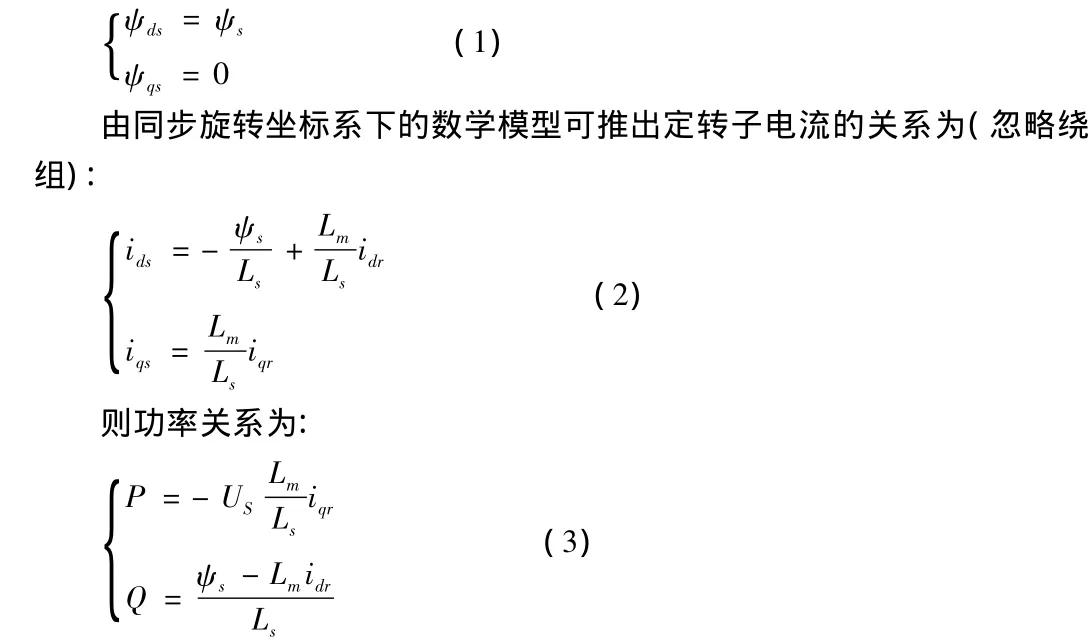
這表明,電機(jī)有功功率和轉(zhuǎn)子電流有功分量成正比,無功功率和轉(zhuǎn)子電流無功分量成正比,只要分別控制轉(zhuǎn)子電流分量和,即可實(shí)現(xiàn)發(fā)電機(jī)有功功率和無功功率的獨(dú)立調(diào)節(jié)。
三、變速恒頻風(fēng)電系統(tǒng)的控制
變速恒頻發(fā)電是20世紀(jì)末發(fā)展起來的一種新型發(fā)電方式,它將電力電子技術(shù)、矢量變換控制技術(shù)和微機(jī)信息處理技術(shù)引入發(fā)電機(jī)控制之中,獲得了一種全新的、高質(zhì)量的電能獲取方式。風(fēng)力機(jī)采用變速運(yùn)行,即風(fēng)機(jī)葉輪跟隨風(fēng)速的變化改變其旋轉(zhuǎn)速度,保持基本恒定的最佳葉尖速比,風(fēng)能利用系數(shù)最大。因此,可以根具風(fēng)速的變化情況,調(diào)整雙饋電機(jī)的轉(zhuǎn)速使之產(chǎn)生恒定頻率的電能。
四、仿真
MATLAB軟件是當(dāng)今控制系統(tǒng)的設(shè)計(jì)與仿真中重要的工具軟件。MATLAB提供的仿真工具箱SIMULINK就是一個功能十分強(qiáng)大的仿真軟件,可以根據(jù)用戶的需要方便地為系統(tǒng)建立模型,并且十分直觀;它的仿真精度很高,仿真結(jié)果準(zhǔn)確。
由于交流勵磁變速恒頻風(fēng)力發(fā)電系統(tǒng)的特點(diǎn),Matlab/Simulink中的Power System基本模塊提供的電機(jī)模型用于雙饋發(fā)電機(jī)仿真時,受到多方面因素的影響,如轉(zhuǎn)子側(cè)供電時接入問題,用PWM供電時如何調(diào)頻等一系列問題,不能完全適應(yīng)仿真的需要。因而不能直接利用Simulink電機(jī)模型進(jìn)行仿真研究。我們基于在兩相同步旋轉(zhuǎn)坐標(biāo)系d-q中建立的雙饋發(fā)電機(jī)的數(shù)學(xué)模型,在Simulink環(huán)境下建立了相應(yīng)的仿真模型。采用上述公式推導(dǎo)所得控制策略,因此轉(zhuǎn)子參考電壓、直接送入發(fā)電機(jī)轉(zhuǎn)子側(cè),,省去了變換器的控制及坐標(biāo)變換,使仿真系統(tǒng)大大簡化[4]。這樣不但簡化了對控制系統(tǒng)仿真的復(fù)雜性,而且并不影響仿真結(jié)果的可信度。
首先,根據(jù)雙饋電機(jī)在兩相旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型建立電機(jī)的仿真模型。單一選電流量為狀態(tài)變量,可得到電機(jī)的狀態(tài)方程,再根據(jù)電機(jī)的運(yùn)動方程和轉(zhuǎn)矩方程便可建立電機(jī)仿真模型,仿真圖型如下所示。
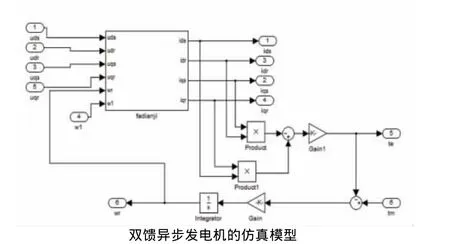
雙饋發(fā)電機(jī)采用定子磁鏈定向的矢量控制,因?yàn)樗⒌哪P蜑閐-q坐標(biāo)系下的仿真模型所以省去了坐標(biāo)變換模塊,從而使仿真更加簡化。
五、結(jié)論
由仿真結(jié)果可以看出,采用矢量控制的方法可以很好地解決雙饋發(fā)電機(jī)的解耦問題并實(shí)現(xiàn)變速恒頻控制達(dá)到控制要求,應(yīng)用MATLAB/Simulink進(jìn)行雙饋發(fā)電機(jī)系統(tǒng)的仿真,能夠解決定轉(zhuǎn)子電源接入的問題,很大程度度上簡化仿真難度。
[1]王振永,王然冉.電機(jī)的數(shù)學(xué)模型及參數(shù)辨識[M].北京:機(jī)械工業(yè)出版社,1991.
[2]李健,李華德.雙饋感應(yīng)變速恒頻風(fēng)力發(fā)電機(jī)控制系統(tǒng)研究.2004.
[3]鄧禹.雙饋型變速恒頻風(fēng)力發(fā)電系統(tǒng)控制技術(shù)研究[M].華中科技大學(xué)碩士學(xué)位論文,2005.4.
[4]包能勝,陳慶新,姜桐.百千瓦級風(fēng)機(jī)建模與仿真[M].太陽能學(xué)報(bào),1997,18(1):51-57.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
故事作文·高年級(2021年12期)2021-12-21 02:32:35
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06
