反應(yīng)堆壓力容器檢查機(jī)支撐腿的設(shè)計(jì)及可靠性研究
2013-10-25 05:21:30吳健榮陳懷東洪茂成
無(wú)損檢測(cè) 2013年11期
吳健榮,陳懷東,林 戈,李 明,洪茂成
(中廣核檢測(cè)技術(shù)有限公司,蘇州 215004)
核反應(yīng)堆壓力容器是核電站的心臟,其壽命直接決定整個(gè)核電站的可用壽期。反應(yīng)堆壓力容器檢查機(jī)——EPR CIME機(jī)是針對(duì)第三代EPR型核電站[1]在役檢查開(kāi)發(fā)的大型無(wú)損檢測(cè)專用設(shè)備,得到國(guó)家863重大項(xiàng)目“核電站專用機(jī)器人技術(shù)與應(yīng)用”資助。EPR CIME機(jī)可以按在役檢查大綱要求為EPR型反應(yīng)堆壓力容器提供全范圍的超聲和視頻檢查[2]。支撐腿部套作為EPR CIME機(jī)支撐和定位的主要功能結(jié)構(gòu),對(duì)整個(gè)反應(yīng)堆壓力容器檢查系統(tǒng)的定位精度和可靠性都有重要影響。
筆者根據(jù)EPR反應(yīng)堆壓力容器結(jié)構(gòu)特點(diǎn),對(duì)EPR CIME機(jī)支撐腿結(jié)構(gòu)進(jìn)行設(shè)計(jì),并采用有限元方法對(duì)其可靠性進(jìn)行分析。在此基礎(chǔ)上設(shè)計(jì)了一套力學(xué)試驗(yàn)方案,對(duì)支撐腿結(jié)構(gòu)設(shè)計(jì)和可靠性分析結(jié)果進(jìn)行試驗(yàn)驗(yàn)證。
1 支撐腿結(jié)構(gòu)設(shè)計(jì)
1.1 反應(yīng)堆壓力容器檢查機(jī)定位方案
EPR CIME機(jī)的結(jié)構(gòu)如圖1所示,其安裝和定位主要通過(guò)三條支撐腿(A,B,C)和反應(yīng)堆壓力容器的導(dǎo)向柱結(jié)構(gòu)實(shí)現(xiàn)。
EPR反應(yīng)壓力容器的第14號(hào)及40號(hào)、5號(hào)及31號(hào)螺栓孔為導(dǎo)向柱安裝位置,在EPR CIME機(jī)的其中兩個(gè)支撐腿(A和C)上設(shè)計(jì)氣動(dòng)定心裝置,可使EPR CIME機(jī)安裝在反應(yīng)堆壓力容器的中心軸線上。為確保所有螺紋孔都能被檢查到,EPR CIME機(jī)采用正、反位兩次安裝(圖2)的方法實(shí)施檢查。正位安裝時(shí),支撐腿A穿過(guò)5號(hào)螺紋孔導(dǎo)向柱,支撐腿C穿過(guò)40號(hào)螺紋孔導(dǎo)向柱,支撐腿B安裝在22號(hào)與23號(hào)螺紋孔之間,此時(shí),EPR CIME機(jī)可完成除第5,40,22,23號(hào)螺紋孔以外的所有檢查。反位安裝時(shí),支撐腿A和C對(duì)應(yīng)安裝在14和31號(hào)螺紋孔導(dǎo)向柱,EPR CIME機(jī)完成余下的第5,40,22,23號(hào)螺紋孔的檢查。

圖1 EPR CIME機(jī)結(jié)構(gòu)
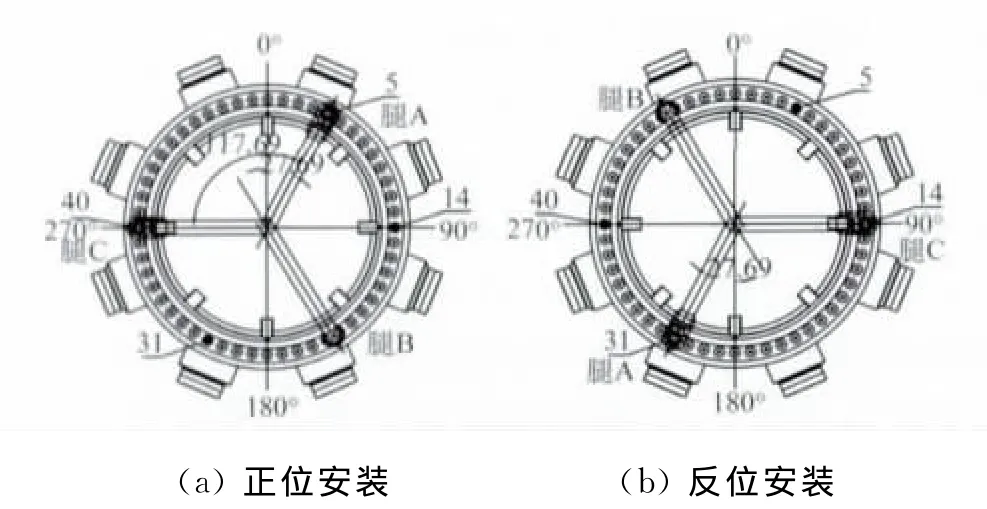
圖2 EPR CIME安裝方式
1.2 反應(yīng)堆壓力容器檢查機(jī)支撐腿結(jié)構(gòu)
支撐腿設(shè)計(jì)需考慮以下三個(gè)要素:
(1)支撐腿A和C的氣動(dòng)定心裝置應(yīng)使EPR CIME機(jī)中心與反應(yīng)堆壓力容器中心同軸。
(2)支撐腿結(jié)構(gòu)應(yīng)具有足夠的強(qiáng)度和安全系數(shù)。
(3)支撐腿結(jié)構(gòu)應(yīng)有較好的剛性,變形量應(yīng)在設(shè)備參數(shù)中修正,確保反應(yīng)堆壓力容器高度方向的定位精度。
為實(shí)現(xiàn)上述設(shè)計(jì)要素,支撐腿A和C的氣動(dòng)定心裝置結(jié)構(gòu)如圖3所示。當(dāng)氣缸伸出時(shí),氣動(dòng)定心裝置伸出三個(gè)滾動(dòng)觸點(diǎn)抱緊導(dǎo)向柱,氣壓驅(qū)動(dòng)的滾動(dòng)觸點(diǎn)可吸收初始位置誤差。每個(gè)支撐腿設(shè)計(jì)成穩(wěn)定的三角形結(jié)構(gòu),主梁采用彎管結(jié)構(gòu)以減少應(yīng)力集中并為檢查臂運(yùn)動(dòng)留出空間。主梁、輔梁、連接板焊接成整體,支撐腿結(jié)構(gòu)如圖4所示。支撐腿徑向跨度由反應(yīng)堆壓力容器法蘭直徑?jīng)Q定,約為5.5m,三個(gè)支撐腿總負(fù)載約為4t。

圖3 氣動(dòng)定心裝置
2 基于有限元方法的支撐腿可靠性研究
2.1 有限元模型的建立
由于三個(gè)支撐腿為非對(duì)稱結(jié)構(gòu),以整體作為研究對(duì)象更能反映真實(shí)受力情況。支撐腿的可靠性問(wèn)題是關(guān)注的重點(diǎn)。有限元建模時(shí),對(duì)每個(gè)部件分別進(jìn)行人工處理,以更好地劃分網(wǎng)格,中間聯(lián)接結(jié)構(gòu)則采用整體自動(dòng)網(wǎng)格劃分以提高計(jì)算效率[3]。
支撐腿A,C和B的幾何形狀大體相同,以支撐腿A為例,具體網(wǎng)格劃分方法如下:MultiZone方法,Mapped Mesh Type為 Hexa,F(xiàn)ree Mesh Type為 Hexa Dominant,Element Size為0.04,Nodes為17941,Element為2514。其模型如圖4。
從圖4(a)可看出,支撐腿網(wǎng)格為六面體結(jié)構(gòu)且布局均勻,具有較好的計(jì)算精度。整體結(jié)構(gòu)模型如圖4(b)所示,總節(jié)點(diǎn)數(shù)115 020,單元數(shù)42 310,總體網(wǎng)格質(zhì)量為0.7。
2.2 材料屬性、邊界條件與載荷工況
支撐腿材料為6063T6牌號(hào)鋁合金,中間結(jié)構(gòu)材料為7075T6牌號(hào)鋁合金。鋁合金6063T6和7075T6的密度為2 770kg/m3,彈性模量為7.1×1010Pa,泊松比為0.33。其中6063T6材料屈服強(qiáng)度為205MPa,7075T6材料屈服強(qiáng)度為506MPa。邊界條件為三個(gè)底座均為固定約束,負(fù)載4t(載荷39 200N)。分析中還考慮了支撐腿結(jié)構(gòu)自重對(duì)分析結(jié)果的影響。
2.3 分析結(jié)果
在軟件中對(duì)支撐腿結(jié)構(gòu)進(jìn)行有限元計(jì)算,其結(jié)果如圖5。計(jì)算所得最大位移為1.103mm,發(fā)生在中間連接結(jié)構(gòu)上。最大應(yīng)力值為74.402MPa,發(fā)生在主梁和連接板過(guò)渡位置處,為應(yīng)力集中點(diǎn)。此時(shí),最小安全系數(shù)是2.755 3。
從圖5中可以看出,除幾個(gè)應(yīng)力集中區(qū)之外,其他部分的應(yīng)力變化量相對(duì)平緩,安全裕度較大。因此,對(duì)焊縫工藝進(jìn)行嚴(yán)格控制,保留一定的圓弧過(guò)渡區(qū),并在焊后進(jìn)行降應(yīng)力打磨處理后,可以獲得較大的安全系數(shù),從而使支撐腿結(jié)構(gòu)具有較高的可靠性。

圖4 支撐腿有限元模型

圖5 支撐腿有限元計(jì)算結(jié)果

圖6 試驗(yàn)方案示意圖
3 支撐腿試驗(yàn)研究
3.1 試驗(yàn)方案
為驗(yàn)證理論分析結(jié)果,利用同批次等比例的支撐腿試件進(jìn)行力學(xué)試驗(yàn),以確保支撐腿結(jié)構(gòu)的可靠性。為節(jié)約成本,使用單個(gè)支撐腿進(jìn)行試驗(yàn)。如圖6(a)所示,試件與固定在承力地軌上的底座連接,載荷通過(guò)加載油車、力傳感器、作動(dòng)筒和加載工裝施加到試件上,力的大小由靜態(tài)電阻應(yīng)變儀和力傳感器控制。試件上布置13個(gè)45°應(yīng)變片,4個(gè)位移測(cè)點(diǎn),試件安裝及測(cè)點(diǎn)布置如圖6(b)所示。
值得注意的是,由于作動(dòng)筒無(wú)法施加垂直方向的約束力,試件與支撐腿實(shí)際受力狀態(tài)有一定的區(qū)別。試驗(yàn)加載方案下,試件受力狀態(tài)比實(shí)際支撐腿工作狀態(tài)要惡劣。試驗(yàn)條件下,試件所受的最大理論應(yīng)力值為74.707MPa,與實(shí)際支撐腿應(yīng)力情況大體相當(dāng),但變形量要大于實(shí)際負(fù)載狀態(tài)。試件最大變形將出現(xiàn)在支撐腿末端,計(jì)算值為8.65mm。
3.2 試驗(yàn)結(jié)果

圖7 試驗(yàn)條件下的支撐腿應(yīng)力和變形分析結(jié)果
如圖8所示,分別以1 200,1 400,1 600,1 800和2 000kg五種拉力對(duì)試件進(jìn)行拉伸和卸載試驗(yàn)。拉伸時(shí),拉力以10%的量逐步加載,達(dá)到試驗(yàn)載荷后保持加載2min;然后以10%的量逐步卸載。每次卸載后,都用放大鏡目視檢查焊縫,無(wú)開(kāi)裂。拉伸和卸載試驗(yàn)全部完成后對(duì)焊縫和折彎位置進(jìn)行著色探傷檢查,未見(jiàn)可顯示缺陷。

表1 不同加載條件下的最大應(yīng)力值和位移值
對(duì)應(yīng)變片和位移傳感器記錄數(shù)值進(jìn)行統(tǒng)計(jì)分析,得到的最大應(yīng)力、最大位移和殘余位移記錄如表1所示。
3.3 結(jié)果分析
表1中最大位移值與理論計(jì)算值大體相當(dāng),最大不超過(guò)5%,載荷退出后,殘余變形量不超過(guò)0.3mm,表明支撐腿變形為彈性變形,未出現(xiàn)過(guò)載。最大應(yīng)力值均來(lái)自第13號(hào)應(yīng)變片,為主梁和輔梁的連接過(guò)渡區(qū),該值略小于計(jì)算值。這是由于應(yīng)變片無(wú)法正好貼在應(yīng)力集中點(diǎn),故測(cè)量值小于理論計(jì)算出的最大應(yīng)力值,與實(shí)際情況相符。綜合上述分析結(jié)果,有限元計(jì)算結(jié)果與試驗(yàn)情況基本相符,支撐腿結(jié)構(gòu)強(qiáng)度滿足設(shè)計(jì)需求。
4 結(jié)語(yǔ)
對(duì)第三代核電站EPR堆型反應(yīng)堆壓力容器檢查機(jī)的支撐腿結(jié)構(gòu)進(jìn)行了設(shè)計(jì),采用有限元方法分析了支撐腿結(jié)構(gòu)的可靠性。力學(xué)試驗(yàn)結(jié)果表明,有關(guān)計(jì)算結(jié)果與實(shí)際試驗(yàn)數(shù)據(jù)基本相符,印證了有限元分析結(jié)果的正確性,證實(shí)了支撐腿結(jié)構(gòu)設(shè)計(jì)的合理性。
[1] 陳泓.世界先進(jìn)反應(yīng)堆型——?dú)W洲壓水堆EPR介紹[J].中國(guó)電力,2000(2):65-69.
[2] 許偉科,李明,陳懷東,等.一種反應(yīng)堆壓力容器檢查機(jī)(TIME)機(jī)械裝置介紹[C].江蘇:南京,遠(yuǎn)東無(wú)損檢測(cè)新技術(shù)論壇論文集,2009:272-275.
[3] 張愛(ài)玲,蔣嵐,成波.基于ANSYS的結(jié)構(gòu)優(yōu)化設(shè)計(jì)方法[J].四川建筑,2009(3):146-150.
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
