蝸桿傳動中蝸桿和蝸輪轉向的判定及輪齒受力分析
2013-10-25 03:30:56張娟
純堿工業 2013年2期
關鍵詞:方向
張 娟
(中昊(大連)化工研究設計院有限公司,遼寧 大連 116023)
蝸桿傳動由蝸桿和蝸輪組成,它用于傳遞空間交錯的兩軸之間的運動和動力,通常蝸桿為主動件。運動可以是增速或減速,最常用的是兩軸交錯角的減速運動。螺旋方向可以是右旋或左旋,一般多取右旋,蝸桿和蝸輪的螺旋線方向必須一致。由于蝸桿傳動的震動、沖擊和噪聲均很小,工作較平穩,能以單級傳動獲得較大的傳動比,結構緊湊,可以自鎖,所以在機床、汽車、冶金、礦山、起重機械設備以及純堿行業等的傳動系統中得到了廣泛的應用。例如在機床工業中,蝸桿傳動幾乎成為一般低速轉動工作臺和分度機構最常用的傳動形式;在起重機械中,各種提升設備、電梯和自動扶梯等都采用了蝸桿傳動;在純堿行業中澄清桶的減速和提升裝置也都采用了蝸桿傳動。因此正確判斷蝸桿傳動轉動方向、受力方向是非常重要的。
1 常見的蝸桿傳動的類型
根據蝸桿的形狀不同,蝸桿傳動可分為圓柱蝸桿傳動、環面蝸桿傳動。根據齒面形狀不同,圓柱蝸桿傳動又分為普通圓柱蝸桿傳動和圓弧齒圓柱蝸桿傳動(ZC型)兩類,其中普通圓柱蝸桿傳動又分為阿基米德圓柱蝸桿(ZA型)、法向直廓圓柱蝸桿(ZN型)、漸開線圓柱蝸桿(ZI型)和錐面包絡圓柱蝸桿(ZK型)四種傳動形式。環面蝸桿傳動分為平面一次包絡環面蝸桿(TVP型)、平面二次包絡環面蝸桿(TOP型)和直廓環面蝸桿(球面蝸桿)(TSL型)三種傳動形式。
2 蝸桿傳動中蝸桿和蝸輪轉動方向的判定
蝸桿和蝸輪的轉動方向的判定用“主動輪左、右手法則”,即根據主動件螺旋線的旋向來決定是用左手法則還是右手法則,如果是左旋則用左手法則,是右旋則用右手法則。如圖1(a)所示,蝸桿的旋向為右旋,蝸桿的轉向為垂直紙面向里,則根據右手法則,四指順著蝸桿的轉向握住蝸桿,大拇指指向的相反方向即為蝸輪在嚙合點處線速度的方向(水平向右),由此便可確定蝸輪的轉向為逆時針旋轉。反過來,如果知道蝸輪螺旋線的旋向和轉向同樣也可以確定蝸桿的轉向。如圖1(b)所示,根據右手法則判斷出蝸桿的轉向為逆時針旋轉。如果知道蝸桿和蝸輪的轉向,也可以判斷出蝸桿和蝸輪的螺旋線的旋向,如圖1(c)所示,判斷出蝸桿和蝸輪的旋向為左旋。(注:圖中雙點劃線為所求結果)

圖1 蝸桿和蝸輪的轉動方向的判定
3 蝸桿傳動的受力分析
蝸桿傳動的受力分析類似于斜齒圓柱齒輪傳動的受力分析,在不計算摩擦力的情況下,作用在輪齒上的法向力Fn在節點P處嚙合時可分解為空間三個互相垂直的分力:圓周力Ft、軸向力Fa和徑向力Fr。因為蝸桿軸與蝸輪軸空間交錯角成90°,所以在蝸桿和蝸輪的齒面間相互作用著Ft1與Fa2、Fa1與Ft2、Fr1與Fr2這樣三對大小相等、方向相反、共線的分力(如圖2所示),即
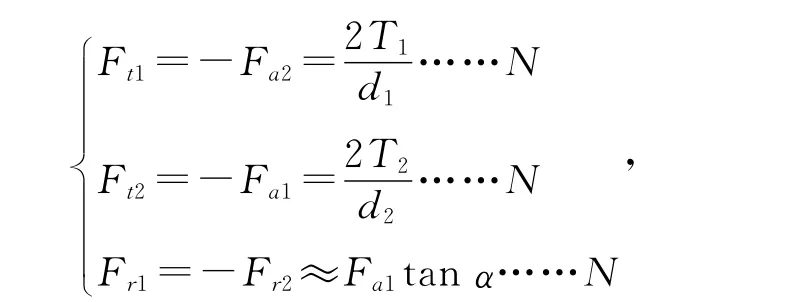
式中:T1、T2——分別為蝸桿和蝸輪軸上的轉矩,N·mm,T2=T1iη,i為傳動比,η為傳動效率;
d1、d2——分別為蝸桿和蝸輪的分度圓直徑,mm;
α——齒形角,α=20°;
γ——蝸桿分度圓柱上的導程角,度(°)。
判斷蝸桿傳動輪齒受力方向時,必須先指明主動輪和從動輪(一般蝸桿為主動輪);蝸桿或蝸輪的螺旋方向(左旋或右旋);蝸桿的轉向和位置。
蝸桿與蝸輪輪齒上各受力方向判斷如下:(1)圓周力Ft的方向:主動輪圓周力Ft1與其節點速度方向相反,從動輪圓周力Ft2與其節點速度方向相同;(2)軸向力Fa的方向:蝸桿主動時,蝸桿軸向力Fa1的方向也是由“主動輪左、右手法則”判斷,即左旋蝸桿用左手、右旋蝸桿用右手,四指順著蝸桿轉動方向彎曲,大拇指的指向即是蝸桿軸向力Fa1的方向。蝸輪軸向力Fa2的方向與蝸桿圓周力Ft1方向相反所示;(3)徑向力Fr的方向:由嚙合點分別指向各自軸心。蝸桿與蝸輪左右旋的判斷,將蝸桿與蝸輪的軸線豎直放置,看螺旋線哪邊高,左邊高為左旋,右邊高為右旋。如圖3所示。

圖2 蝸桿傳動的受力分析

圖3 蝸桿與蝸輪左右旋的判斷
4 實際應用舉例
標出圖4中未注明的蝸桿或蝸輪的輪齒螺旋線方向及轉動方向(均為蝸桿主動);畫出蝸桿和蝸輪受力的作用點及三個分力的方向[用箭頭或?(受力方向垂直紙面向里)、⊙表示(受力方向垂直紙面向外),例如Fa1、⊙Ft1]。

圖4 應用舉例
(a)因為蝸桿和蝸輪的螺旋線方向必須一致,所以蝸輪的螺旋線方向為左旋,應用左手法則,左手四指順著蝸桿的轉向握住蝸桿,大拇指指向向左即為蝸輪在嚙合點處線速度的相反方向,所以蝸輪的轉向為順時針旋轉。蝸輪的旋轉方向求出,再根據左手法則對蝸桿和蝸輪進行受力分析,蝸桿和蝸輪的圓周力Ft、軸向力Fa及徑向力Fr可分別求出,如圖5(a)所示。
(b)蝸桿為右旋,所以蝸輪的螺旋線方向也為右旋,由蝸輪的轉向可知蝸輪的圓周力Ft2垂直紙面向外,因為蝸桿的軸向力Fa1與蝸輪的圓周力Ft2方向相反,從而得知蝸桿的軸向力Fa1方向為垂直紙面向里,應用右手法則,右手的大拇指指向Fa1的方向,則四指的彎曲方向就是蝸桿的旋轉方向,即蝸桿為順時針旋轉。蝸桿的旋轉方向求出,再根據右手法則對蝸桿和蝸輪進行受力分析,蝸桿和蝸輪的圓周力Ft、軸向力Fa及徑向力Fr可分別求出,如圖5(b)所示。
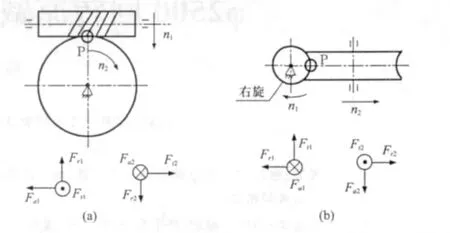
圖5 應用舉例的畫法
5 結 語
通過分析與舉例,可以看出判斷蝸桿傳動輪齒受力方向的方法還是很簡單的,其軸向力Fa的方向,既可以按照主動件左、右手法則來確定,也可以根據對應圓周力Ft的方向來確定,即Fa1與Ft2方向相反,Fa2與Ft1方向相反。顯然,正確判定蝸桿和蝸輪的轉動方向是分析受力方向的先決條件。
[1] 王連明,榮涵銳.機械設計[M].哈爾濱:哈爾濱工業大學出版社,1998
[2] 成大先.機械設計手冊[M].北京:化學工業出版社,2008
[3] 陳立德.機械設計基礎[M].北京:高等教育出版社,2000
[4] 初嘉鵬,賀鳳寶.機械設計基礎[M].北京:中國計量出版社,2002
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50