基于疲勞損傷反饋的直升機模型跟蹤控制
2013-11-04 03:05:56劉晶吳愛國方星
飛行力學 2013年6期
劉晶, 吳愛國, 方星
(天津大學 電氣與自動化工程學院, 天津 300072)
基于疲勞損傷反饋的直升機模型跟蹤控制
劉晶, 吳愛國, 方星
(天津大學 電氣與自動化工程學院, 天津 300072)
直升機飛行控制的設計目標在于滿足飛行品質要求的同時,應保證直升機具備較高的可靠性、可用性、部件耐久性以及可維護性。給出了黑鷹UH-60直升機前飛狀態(tài)下的模型跟蹤控制方法,同時考慮了關鍵部件的結構壽命,實現(xiàn)了直升機的姿態(tài)和高度控制,并且有效地權衡了飛行品質以及結構壽命。該模型跟蹤控制系統(tǒng)由疲勞損傷和飛行速度兩個參數(shù)調度。疲勞損傷是旋翼軸彎矩所產生的裂紋長度,表征了旋翼軸的結構壽命。非線性仿真結果表明,直升機系統(tǒng)解耦控制特性良好,能夠跟蹤指定輸入,并且飛行控制系統(tǒng)動態(tài)性能的輕微下降能夠顯著提高結構壽命。
直升機; 姿態(tài)和高度控制; 模型跟蹤控制; 疲勞損傷
0 引言
傳統(tǒng)飛行控制器的設計是基于直升機關鍵部件具有不變特性的假設,盡管在設計中做到了不超過其結構載荷,但并沒有考慮某些關鍵部件的結構壽命。不考慮直升機關鍵部件的結構壽命將導致:由于過于保守的設計,使直升機飛行性能低于本應達到的飛行品質;為追求更高的飛行性能,導致關鍵部件損傷,使其壽命大幅減小以及產生意外的故障[1]。考慮未來直升機具有攻擊性飛行、重量輕的特點及其成本效益,所以飛行控制器的設計將結合飛行品質和結構壽命來進行。
本文以黑鷹UH-60直升機為研究對象,基于模型跟蹤控制原理,設計了直升機的姿態(tài)和高度控制器,同時考慮了旋翼軸的結構壽命,引入了疲勞損傷作為反饋信號,并且給出了旋翼軸彎矩所產生的疲勞損傷的估計方法。仿真結果表明,系統(tǒng)的解耦控制特性良好,并且能夠跟蹤指定的輸入;當引入疲勞損傷反饋后能夠有效地權衡飛行品質以及結構壽命。
1 控制器設計
1.1 直升機模型降階
針對不同的飛行條件,非線性直升機仿真軟件GENHEL根據(jù)小擾動線性化方法能夠生成線性狀態(tài)方程。同時,頻域響應方法(CIFER軟件)用于驗證狀態(tài)方程的正確性。全階線性狀態(tài)方程包含29個狀態(tài)量和5個控制量。
其中:
x=[u,v,w,p,q,r,φ,θ,ψ,β0,β1c,β1s,
λ1c,λ1s,Ω,xe1,xe2,xe3,xe4]T
u=[δlat,δlon,δcol,δped,δthe]T
由于飛行控制器框架中逆模型是基于4階狀態(tài)方程,這里將直升機動態(tài)特性劃分為快速動態(tài)和慢動態(tài),從而實現(xiàn)模型的降階。在移除發(fā)動機狀態(tài)量和輸入之后,直升機狀態(tài)方程可表示為:
式中,xs為機身狀態(tài)量,表征慢動態(tài);xf為旋翼狀態(tài)量,表征快動態(tài)。
由此可得出以(u,v,w,p,q,r,φ,θ,ψ)為狀態(tài)量的9階狀態(tài)方程:
移除(u,v,φ,θ,ψ)后,即實現(xiàn)了直升機模型的降階。
1.2 模型跟蹤控制器
模型跟蹤控制器完成了滾轉和俯仰方向姿態(tài)控制,以及偏航角速度和垂直速度控制。圖1所示為系統(tǒng)框圖。圖中,xcmd為命令輸入,包括機體坐標系下的滾轉角φ、俯仰角θ、偏航角速度r以及地面坐標系下垂直速度Vz的給定值[2]。
xcmd=[φcmd,θcmd,rcmd,Vzcmd]T
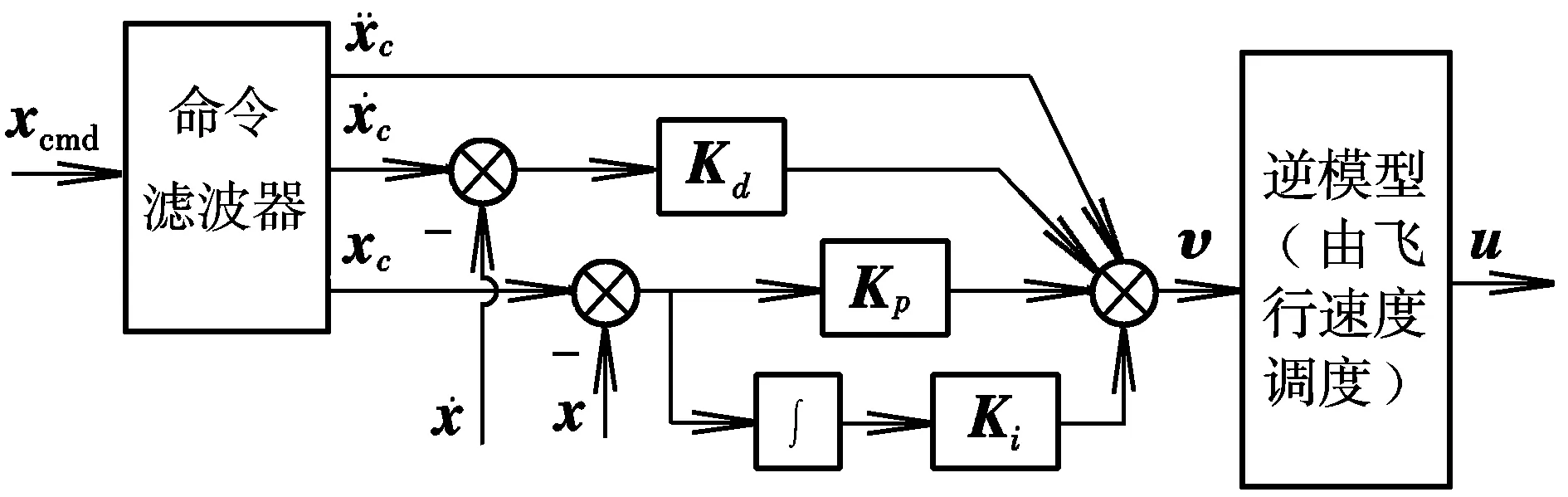
圖1 模型跟蹤控制系統(tǒng)框圖Fig.1 Schematic diagram of model-following control system

跟蹤誤差定義為命令濾波器輸出狀態(tài)與直升機輸出值之間的比較差值:
并且,偽逆υ定義如下:
式中,υ=[υφ,υθ,υVz,υr]T,表征直升機期望的滾轉、俯仰、偏航角加速度以及垂直加速度[3]。υ由4軸給定加速度與PID控制器(由對角增益矩陣Kp,Kd,Ki表示)組成。在偏航和垂直速度方向, 增益矩陣Ki=0。
逆模型是基于4階加速度動力學線性模型(如下式所示),其系數(shù)矩陣Ar,Br由直升機飛行速度V調度。
式中,x=[p,q,w,r]T,u=[δlat,δlon,δcol,δped]T;w為直升機機體坐標系下垂直速度。
基于逆模型的控制律設計如下:
u=Br(V)-1(υ-Ar(V)x)
若期望輸入與實際輸出互相匹配,則跟蹤誤差由以下微分方程表示:
通過選擇合適的增益矩陣,該控制系統(tǒng)能夠實現(xiàn)對外部干擾的抑制,以及補償簡單線性模型與實際高階模型之間的誤差[4]。
1.3 疲勞損傷反饋
疲勞損傷表征了關鍵部件的結構壽命,可量化為0~1之間的數(shù)值,用參數(shù)D表示[5]。控制系統(tǒng)中引入疲勞損傷反饋主要能夠有效地權衡飛行品質以及結構壽命,以保證飛行過程中關鍵部件運行的安全性和可用性。疲勞損傷信號反饋到命令濾波器以及PID 控制器,即命令濾波器參數(shù)(自然頻率ω、時間常數(shù)τ)是疲勞損傷的函數(shù):
ω=f2(D),ω={ωnφ,ωnθ}
τ=f1(D),τ={τVz,τr}
PID控制器參數(shù)(增益矩陣)是疲勞損傷的函數(shù):
Kp=f3(D),Ki=f4(D),Kd=f5(D)
當疲勞損傷接近零時,直升機應具備高性能飛行品質;隨著疲勞損傷的遞增,閉環(huán)系統(tǒng)的頻寬將降低,直升機響應將更加遲緩。當疲勞損傷值接近關鍵部件所能承受的極限值時,飛行品質將明顯下降。這將有效實現(xiàn)飛行品質和疲勞損傷的權衡,因為遲緩的飛行性能對轉矩產生較小的瞬態(tài)響應,進而減小對旋翼槳轂等關鍵部件所產生的損傷。而且針對整個飛行包線設計一系列飛行控制器,并通過上層監(jiān)控系統(tǒng)根據(jù)疲勞損傷選擇控制器參數(shù),進而對控制器進行調度。
1.4 旋翼軸彎矩所產生的疲勞損傷
旋翼軸彎矩是由機動飛行中旋翼的重力以及空氣動力所產生的。該彎矩由旋翼的葉片傳遞到旋翼軸,并且遠大于其它拉伸力。旋翼軸彎矩的增大,會增加旋翼軸所產生的疲勞損傷,使得其使用壽命驟減,維護頻率增加,飛行風險增加。

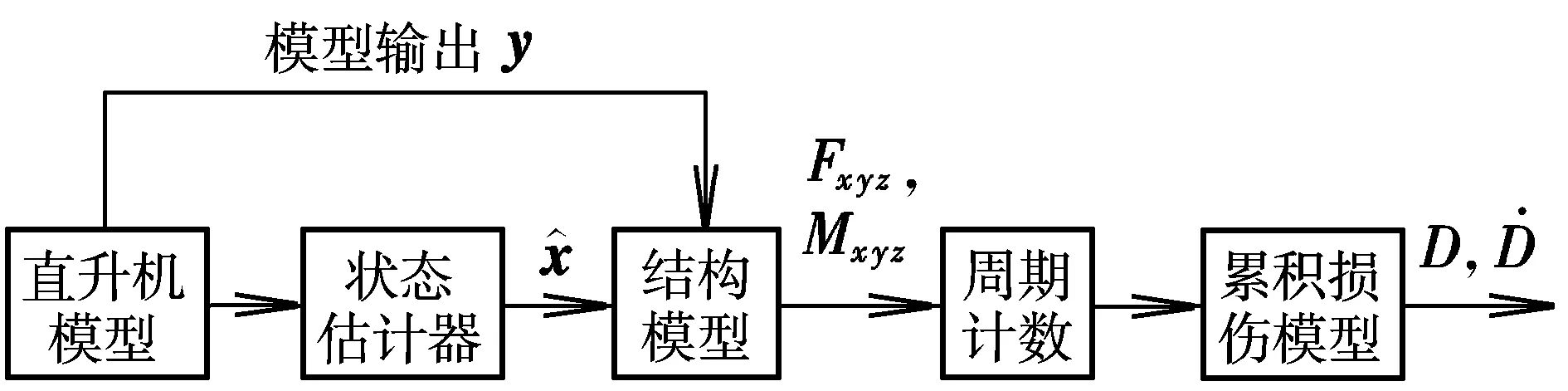
圖2 疲勞損傷模型Fig.2 Fatigue damage model
2 試驗結果
2.1 姿態(tài)控制系統(tǒng)仿真結果
GENHEL為非線性仿真模型,主要用于對直升機飛行過程中的性能和動態(tài)響應進行實時仿真。其包含多種預先定義的基本分析軟件,如平衡點、靜力平衡、時域以及頻域響應的分析與計算。在Matlab/Simulink仿真環(huán)境下編寫的飛行控制算法可以通過實時工作間(RTW)工具箱與GENHEL飛行動力學模型連接,進而實現(xiàn)飛行控制仿真研究[7]。
直升機在前飛狀態(tài)下,飛行速度為30 kn,同時對滾轉、俯仰和偏航通道輸入雙極性方波信號作為飛行員指令:滾轉角輸入信號φcmd的幅值為4.5°;俯仰角輸入信號θcmd的幅值為3.0°;偏航角速度輸入信號rcmd的幅值5.0 (°)/s。其中偏航角ψ與偏航角速度r之間為準積分關系。
圖3所示為模型跟蹤控制仿真結果。
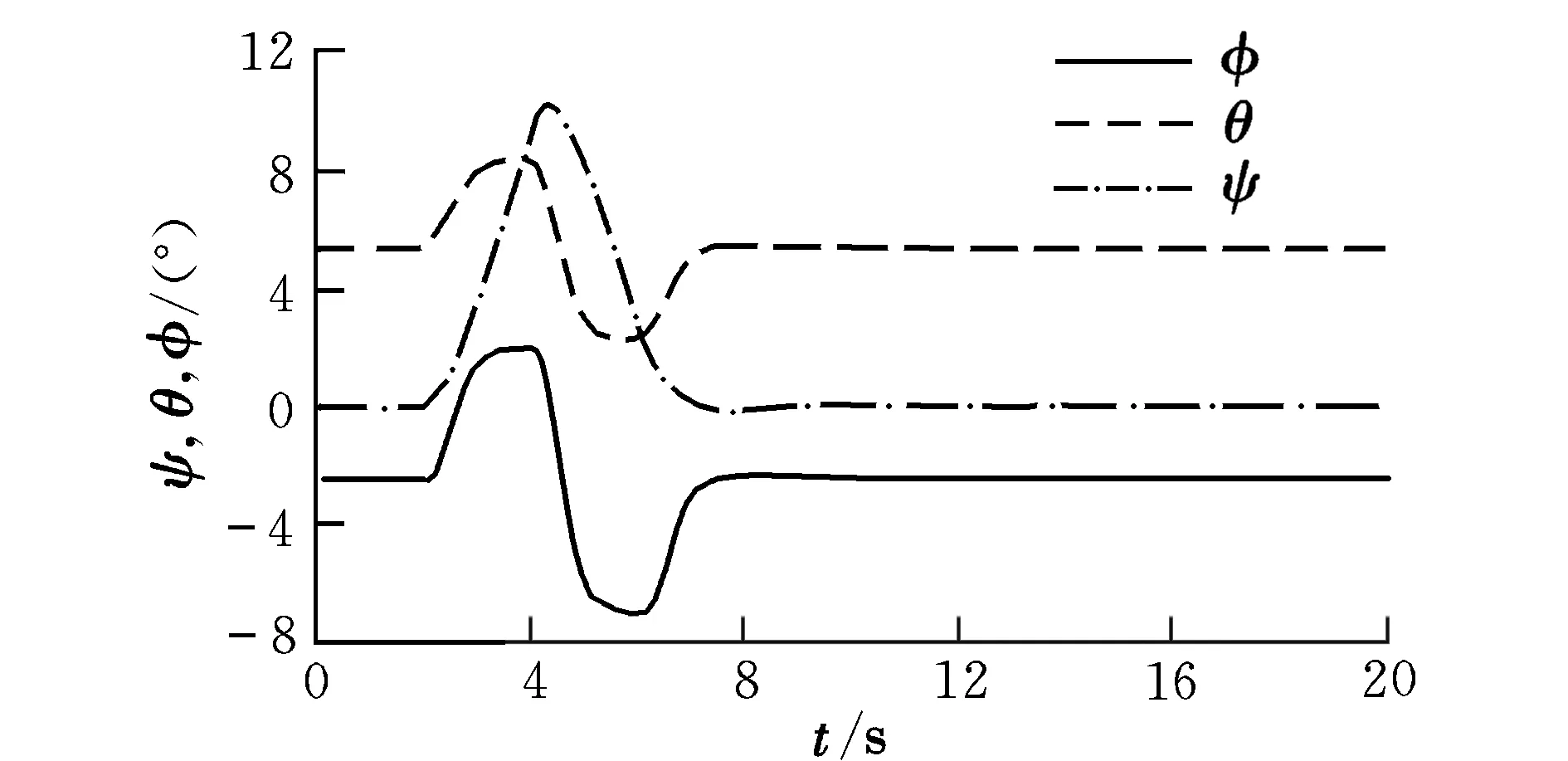
圖3 姿態(tài)角輸出響應Fig.3 Attitude angle output response
由仿真計算結果可以看出,模型跟蹤控制系統(tǒng)能夠跟蹤三軸的期望輸入,能夠得到令人滿意的解耦控制效果。
2.2 姿態(tài)和高度控制系統(tǒng)仿真結果
總距輸入引起旋翼反扭矩的變化,進而影響偏航角。這時需要調節(jié)尾槳槳距,而尾槳槳距同時與其他三軸輸入耦合。故引入垂直速度Vz為附加給定跟蹤輸入量,設計出姿態(tài)和高度控制器。
圖4所示為引入高度控制前后的偏航通道仿真結果。
由仿真結果可以看出,在三軸姿態(tài)控制系統(tǒng)中,總距輸入使偏航角產生約6.0°的偏差;姿態(tài)和高度控制器能夠補償總距輸入對偏航角所產生的偏差,能夠得到滿意的控制效果。
2.3 引入疲勞損傷反饋的控制系統(tǒng)仿真結果

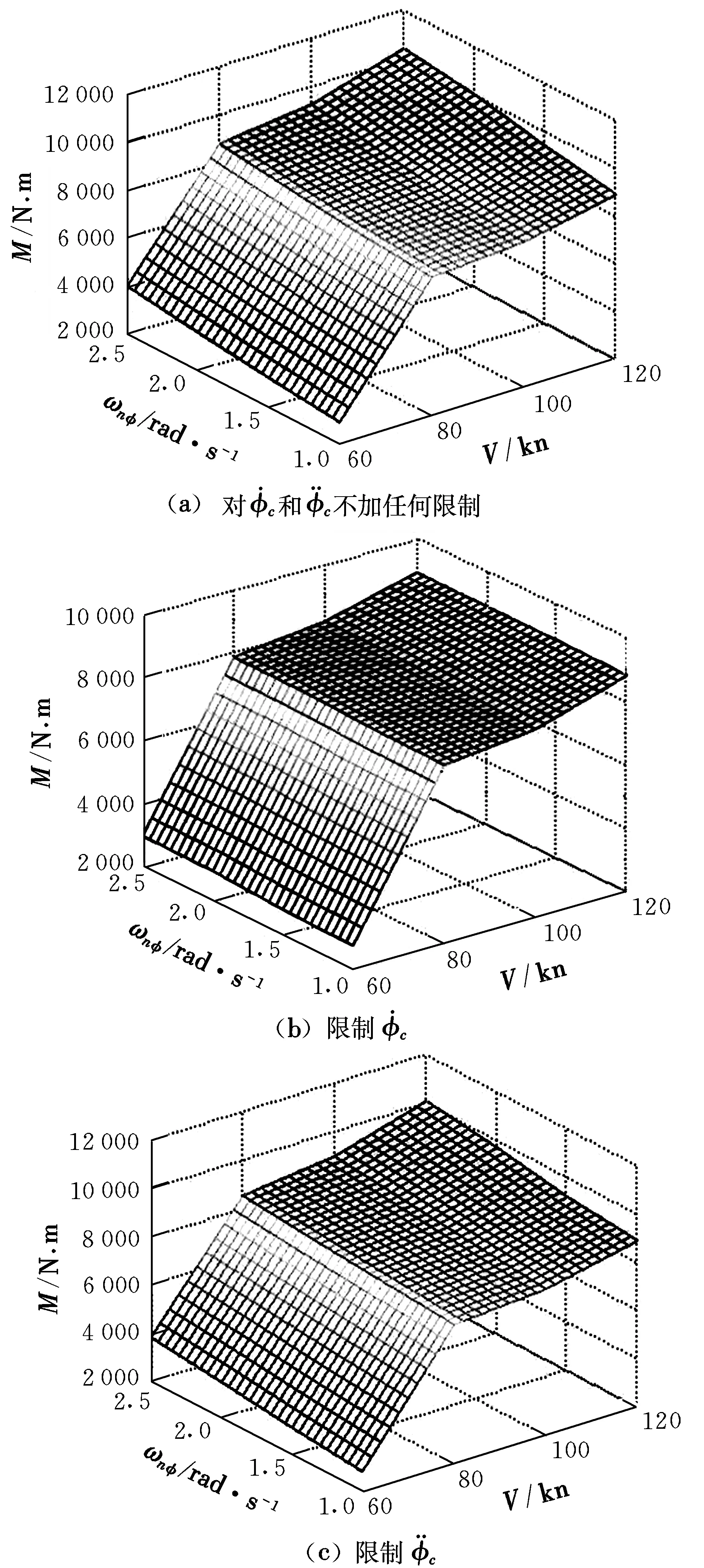
圖5 飛行速度和自然頻率對旋翼軸彎矩的影響Fig.5 Shaft bending moment influenced by flight velocity and natural frequency
由圖5可以看出,隨著自然頻率和飛行速度的增加,旋翼軸彎矩將增大,疲勞損傷相應增大。如果對滾轉速度和滾轉加速度加以限制,旋翼軸彎矩將減小,疲勞損傷也相應減小。經過比較分析可知,相對于命令濾波器滾轉加速度,對滾轉速度加以限制能夠更好地減小疲勞損傷。
圖6所示為在疲勞損傷調度的控制器作用下滾轉角的輸出響應。
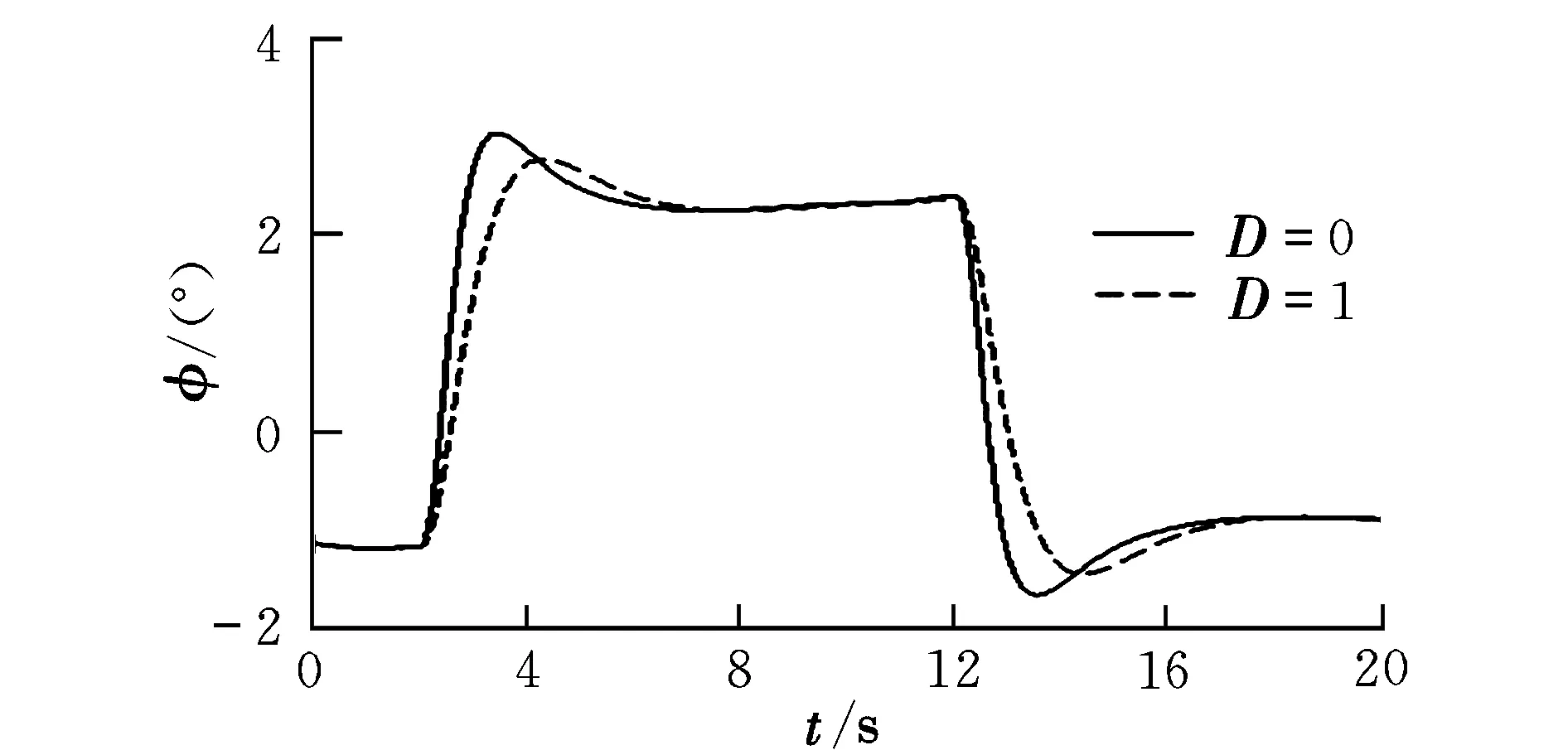
圖6 基于疲勞損傷反饋的控制系統(tǒng)輸出響應Fig.6 Output responses of control system based on fatigue damage feedback
以滾轉軸為例,當疲勞損傷為零時,直升機飛行品質高于ADS-33E第一等級標準,閉環(huán)系統(tǒng)頻寬為2.5 rad/s;當疲勞損傷為1時,飛行品質降至ADS-33E第二等級,閉環(huán)系統(tǒng)的頻寬為1.5 rad/s。并且系統(tǒng)動態(tài)性能的輕微下降能夠明顯提高結構壽命。根據(jù)不同疲勞損傷等級選擇不同的控制器參數(shù),進而能夠有效地權衡飛行品質以及結構壽命。
3 結束語
本文給出了直升機前飛狀態(tài)下模型跟蹤控制方法,設計了引入疲勞損傷反饋后系統(tǒng)的控制律,測試和分析了不同飛行條件下的旋翼軸彎矩疲勞損傷。通過仿真表明,直升機系統(tǒng)在跟蹤指定輸入的同時,能夠實現(xiàn)飛行品質和疲勞損傷的權衡。
[1] Chimpalthradi R,Ashokkumar B D.Adaptive control for structural damage mitigation [J].Global Journal of Researches in Engineering:Aerospace Engineering,2011,11(5):13-19.
[2] Guo W,Horn J F.Rotor state feedback control for rotorcraft with variable rotor speed [R].AIAA-2009-5797,
2009.
[3] Smith P R.A simplified approach to nonlinear dynamic inversion based flight control [C]//Atmospheric Flight Mechanics Conference and Exhibit.Boston,USA,1998:760-770.
[4] Colgren R,Enns D.Dynamic inversion applied to the F-117A [R].AIAA-97-3786,1997.
[5] Ray A,Wu M-K,Carpino M,et al.Damage-mitigating control of mechanical systems:part I — conceptual development and model formulation [J].Journal of Dynamic Systems,Measurement,and Control,1994,116(3):437-447.
[6] Ray A,Wu M-K,Carpino M,et al.Damage-mitigating control of mechanical systems:part II — formulation of an optimal control policy and simulation [J].Journal of Dynamic Systems,Measurement,and Control,1994,116(3):448-455.
[7] Stevens B L,Lewis F L.Aircraft control and simulation [M].2nd Revised Edition.NJ:John Wiley & Sons Inc,2003.
(編輯:姚妙慧)
Helicoptermodel-followingcontrolbasedonfatiguedamagefeedback
LIU Jing, WU Ai-guo, FANG Xing
(School of Electrical Engineering and Automation, TJU, Tianjin 300072, China)
The main goal in the helicopter flight control is to ensure that the helicopter has higher reliability, availability, component durability and maintainability while meeting the flying quality. This paper presents a model-following control (MFC) method for Black Hawk UH-60 in forward flight by taking the structural life of critical component into consideration. The controller is applied to realize attitude and height control, and trade off the flight handling qualities and structural life. The MFC controller is gain scheduled by fatigue damage and total airspeed. Fatigue damage, which represents the structural life, is the crack length generated by the rotor shaft bending moment. The results of nonlinear simulations show that the 4-axis decoupling control is realized and the responses can track the pilot’s command. And a significant improvement in structural life is achieved by a small reduction in flight control system performance.
helicopter; attitude and height control; model-following control (MFC); fatigue damage
V249.1; V275.1
A
1002-0853(2013)06-0530-05
2013-04-01;
2013-08-28; < class="emphasis_bold">網絡出版時間
時間:2013-10-22 14:12
劉晶(1987-),女,江西撫州人,博士研究生,研究方向為導航、制導與控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
