機器人全閉環定位誤差因素敏感度分析
2013-11-05 06:55:56齊立哲
北京航空航天大學學報 2013年3期
齊立哲
(北京航空航天大學機器人研究所,北京100191)
王 偉
(北京航空航天大學機器人研究所,北京100191)
陳 磊
(上海飛機制造有限公司,上海200436)
余蕾斌
(上海飛機制造有限公司,上海200436)
工業機器人重復定位精度很高,但絕對定位精度很差.為了提高機器人的性能及拓展工業機器人的應用范圍,需要對機器人運動學模型的參數進行標定來降低它的絕對定位誤差.標定是建模、測量、參數識別和誤差補償4個步驟的集成過程[1].目前已有很多國內外學者基于矩陣變換、矢量等表達形式給出了多種機器人的定位誤差分析與補償方法[2-6],但由于影響機器人定位誤差的因素很多,基于理論分析公式對機器人定位誤差進行實際標定的結果都不太理想.為了有效實際標定出機器人的定位誤差,Ting K等人提出了從參數誤差到末端誤差映射的靈敏性雅可比概念,證明了要提高機構的末端誤差,只需要提高關鍵因素的精度,可以適當放寬次要因素誤差[7];郭劍鷹等人提出將影響轉動誤差和位置誤差的因素分離開發,采用兩步線性識別方法對參數進行標定的方法,在一定程度上簡化了標定過程[8];王偉等人采用正交試驗法綜合了3R機器人機構精度,繪制出了某一復雜曲面任務下機器人末端的誤差分布圖和影響末端誤差因素的顯著程度順序圖,計算出了當前目標點下誤差因素對末端誤差的影響顯著程度[9].
本文針對因影響定位誤差因素較多而不易對機器人定位誤差進行準確標定的問題,充分考慮了定位誤差測量環節中對定位誤差有影響的坐標系參數因素及因機器人末端點分布不同而導致定位誤差也不一樣的情況,首先基于雅克比矩陣建立了包含33個運動學參數的6自由度串聯機器人全閉環定位誤差數學模型;然后給出了用于分析各因素單點敏感度的機器人的單因素微分定位誤差(SFDPE,Single Factor Differential Positioning Error)及相對單因素微分定位誤差(RSFDPE,Relative Single Factor Differential Positioning Error)公式;接著采用正交實驗法設計了能全面反映機器人定位誤差分布的數據采樣空間并基于區間概率密度概念給出了單因素綜合微分定位誤差(SFCDPE,Single Factor Comprehensive Differential Positioning Error)及相對單因素綜合微分定位誤差(RSFCDPE,Relative Single Factor Comprehensive Differential Positioning Error)公式;最后基于前面的公式,采用MATLAB分別仿真了影響由FARO ARM和ABB 1410工業機器人形成的測量系統定位誤差的各因素的單點敏感度(SPS,Single Point Sensitivity)及多點綜合敏感度(MPCS,More Points Comprehensive Sensitivity),為進一步進行機器人定位誤差的標定打下了基礎.
1 機器人全閉環定位誤差數學模型
1.1 全閉環運動學模型
為了測量出機器人定位誤差,需要建立機器人定位誤差測量系統.如圖1所示,一般機器人定位誤差測量系統由測量設備、測量靶標及機器人組成.
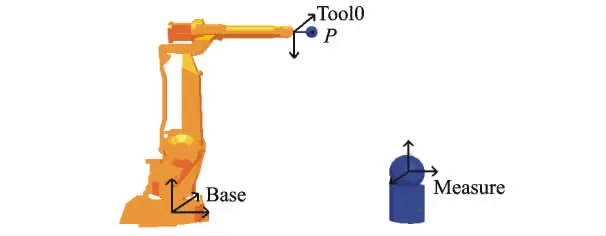
圖1 機器人定位誤差測量系統組成原理圖
在機器人定位誤差測量系統中,測量設備可以直接測量出靶標中心P在Measure坐標系下的坐標,同時機器人本身也可以作為測量裝置獲得被機器人抓著的靶標中心P在機器人Base坐標系下的坐標,兩者進行坐標變換便可以統一到同一個坐標系下,進而進行比較便可獲得機器人在其工作空間內各個測量點的定位誤差.基于機器人的定位誤差測量過程,便形成了一個包含2個轉換矩陣的全閉環運動學模型,其表示如下:

其中,PM為測量點P在Measure坐標系下的坐標;BTM為機器人Base坐標系與Measure坐標系下的轉換矩陣;T0TB為工業機器人Tool0坐標系在機器人Base坐標系下的轉換矩陣;PT0為P點在Tool0坐標系下的坐標.
采用工業機器人D-H方法建立的連桿坐標系.在運動學分析時,建立連桿坐標系.每個連桿坐標系轉換矩陣包含4個運動學參數,即θi,αi,ai,di;6自由度工業機器人T0TB有24個運動學參數;BTM為一4×4的轉換矩陣,可用3個平移變量PBx,PBy,PBz及3個用歐拉角表示的旋轉變量RBx,RBy,RBz表示;PT0為一 4×1 的矩陣,根據其含義可用3個平移變量PTx,PTy,PTz表示.則機器人定位誤差測量系統的全閉環運動學模型共包含33個運動學參數,這33個參數誤差也是影響機器人靜態定位誤差的主要因素.
1.2 全閉環定位誤差數學模型
根據公式(1),機器人定位誤差測量系統全閉環運動學模型可變形為
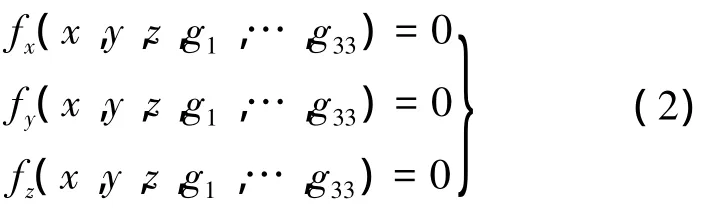
其中,(x,y,z)為被測量點在測量坐標系下的絕對坐標值;gi(i=1~33)為運動學模型中的33個運動學參數;f為以x,y,z為變量,以系統中33個運動學參數為參數的三元方程組.當運動學參數無誤差時,也不存在機器人定位誤差;但實際情況運動學參數總會存在一定的誤差,從而帶來機器人的定位誤差.
為簡化分析過程,對式(2)進行一階微分,令
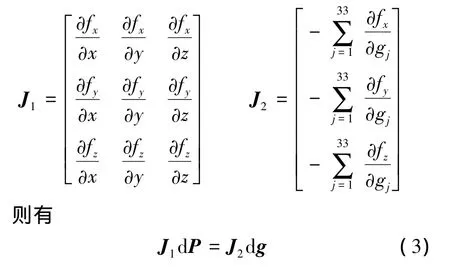
從而便獲得基于雅克比矩陣的機器人全閉環定位誤差數學模型為

2 定位誤差影響因素敏感度分析
影響機器人全閉環定位誤差的因素有33個,通過建立的基于雅可比矩陣的機器人全閉環定位誤差數學模型可將這些因素對定位誤差的影響分離開來,這種分離避免了因這些因素的交叉影響而帶來的對敏感度分析的復雜性.
為了分析出機器人在某一位姿時各個因素對定位誤差的SPS,令
其中,Θgk被稱為第 k個因素的機器人SFDPE;R(gi:gj)被稱為第i及第j個因素的RSFDPE;Θgi為機器人基準單因素微分定位誤差,對應的因素為基準因素.
可用各因素間的RSFDPE來分析機器人在某個位姿時影響定位誤差的各因素的SPS,即機器人某個因素相對于基準因素的RSFDPE越大,則表明此因素的SPS較高;反之,較低.
為了分析出機器人整個工作空間內的各個因素的 MPCS,令
其中,ΣΘgk為第 k個因素在機器人N個位姿的SFCDPE;ΣR(gi:gj)為第i及第j個因素在機器人N個位姿的RSFCDPE;ΣΘgi為機器人基準單因素綜合微分定位誤差,對應的因素為基準因素;為機器人第 m個位姿的第 i個因素的SFDPE;npim,npjm分別表示機器人第m個位姿的第i及第j個因素的SFDPE所在區間n的區間概率密度,可表示為

可用各因素間的RSFCDPE來分析各因素在機器人多個位姿對機器人定位誤差影響的MPCS,即機器人某個因素相對于基準因素的RSFCDPE越大,則表明此因素的MPCS較高;反之,較低.
此外,為充分體現機器人實際定位誤差分布情況,可采用正交試驗法設計原理設計機器人N個位姿,即設計機器人位姿樣本空間.在此應用中可采用6因素、5水平及25實驗次數的正交表,即L52(56).從而可獲得機器人位姿樣本空間:

其中,θmn表示樣本空間中第m個樣本點對應的機器人第n個關節角值;vmn表示正交表中第m行第 n列對應的值;minθn,maxθn分別表示機器人第n個關節角的最小值和最大值.
從定位誤差傳遞數學模型可知,影響機器人全閉環定位誤差的運動學因素可以分為3類,下面分別分析各類因素的敏感度.
1)關節角因素分析:關節角因素敏感度反映了機器人6個關節角誤差對機器人全閉環定位誤差的影響程度,通過分析可以得到在機器人位姿樣本空間內關節角敏感度分布情況.
2)各結構角度量因素分析:各結構角度量因素敏感度反映了機器人6個連桿坐標系角度參數、3個機器人Base坐標系與Measure坐標系下的轉換矩陣的姿態分量誤差對機器人全閉環定位誤差的影響程度,通過分析可以得到在機器人位姿樣本空間內各結構角度量敏感度分布情況.
3)結構平移量因素分析:各結構平移量因素敏感度反映了機器人12個連桿坐標系平移參數、3個機器人Base坐標系與Measure坐標系下的轉換矩陣的位置分量及3個測量點P在Measure坐標系下的坐標分量誤差對機器人全閉環定位誤差的影響程度,通過分析可以得到在機器人位姿樣本空間內各結構平移量敏感度分布情況.
3 定位誤差影響因素敏感度仿真
建立的工業機器人定位誤差測量實驗系統見圖2,它包含被標定機器人、FARO ARM及測量靶標.工業機器人采用ABB IRB 1410機器人,此機器人是一種機身緊湊的機器人,承受載荷最高可達5 kg,具有較高的重復定位精度,通過對其絕對定位誤差進行標定后,可以大大拓展其應用領域;誤差測量設備采用USB型FARO ARM,該測量設備具有測量精度高、操作簡單等優點,可以直接測得機器人手臂上靶標在其坐標系下的坐標.
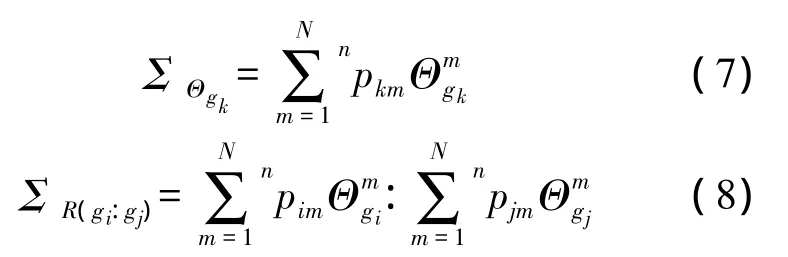
基于正交實驗法設計的ABB IRB1410機器人的位姿樣本空間的所有子空間中心點分布情況如圖3所示.

圖2 機器人定位誤差測量實驗系統圖
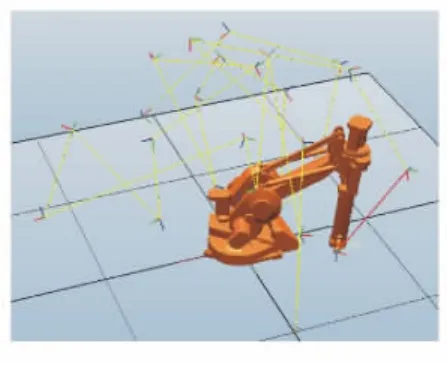
圖3 樣本子空間中心點分布圖
各因素的初始值都是已知量.根據這些信息并結合第3節的定量計算公式,便可計算出各個因素對機器人定位誤差的敏感度分布情況.經由仿真結果看,機器人各結構平移量因素的SPS和MPCS都一樣.因此,這里只給出機器人各角度因素SPS及MPCS的仿真結果,見圖4~圖7.
圖4 關節角因素敏感度仿真結果
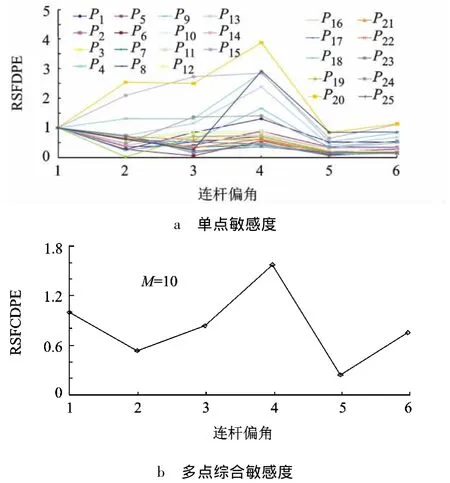
圖5 連桿偏角因素敏感度仿真結果
圖4a為機器人關節角因素在機器人位姿樣本空間中的SPS仿真結果.其中,橫坐標表示6個關節角,第1個關節角為基準因素;縱坐標為各因素相對于基準因素的RSFDPE;25條線給出了不同樣本點對應的各因素RSFDPE.圖4b為機器人關節角因素在機器人位姿樣本空間中的MPCS仿真結果.其中,橫坐標表示6個關節角,第一個關節角為基準因素;縱坐標為各因素相對于基準因素的RSFCDPE.
圖5a為機器人連桿偏角因素在機器人位姿樣本空間中的SPS仿真結果.其中,第1個連桿偏角為基準因素.圖5b為機器人連桿偏角因素在機器人位姿樣本空間中的MPCS仿真結果.
圖6a為機器人基坐標系姿態因素在機器人位姿樣本空間中的SPS仿真結果.其中,第1個基坐標系姿態分量為基準因素.圖6b為機器人基坐標系姿態因素在機器人位姿樣本空間中的MPCS仿真結果.
圖7a為機器人3類角度基準因素在機器人位姿樣本空間中的SPS仿真結果.其中,橫坐標表示3個角度分量(依次為關節角-連桿偏角-基坐標系姿態),第1個角度分量為基準因素.圖7b為機器人3類角度因素在機器人位姿樣本空間中的MPCS仿真結果.
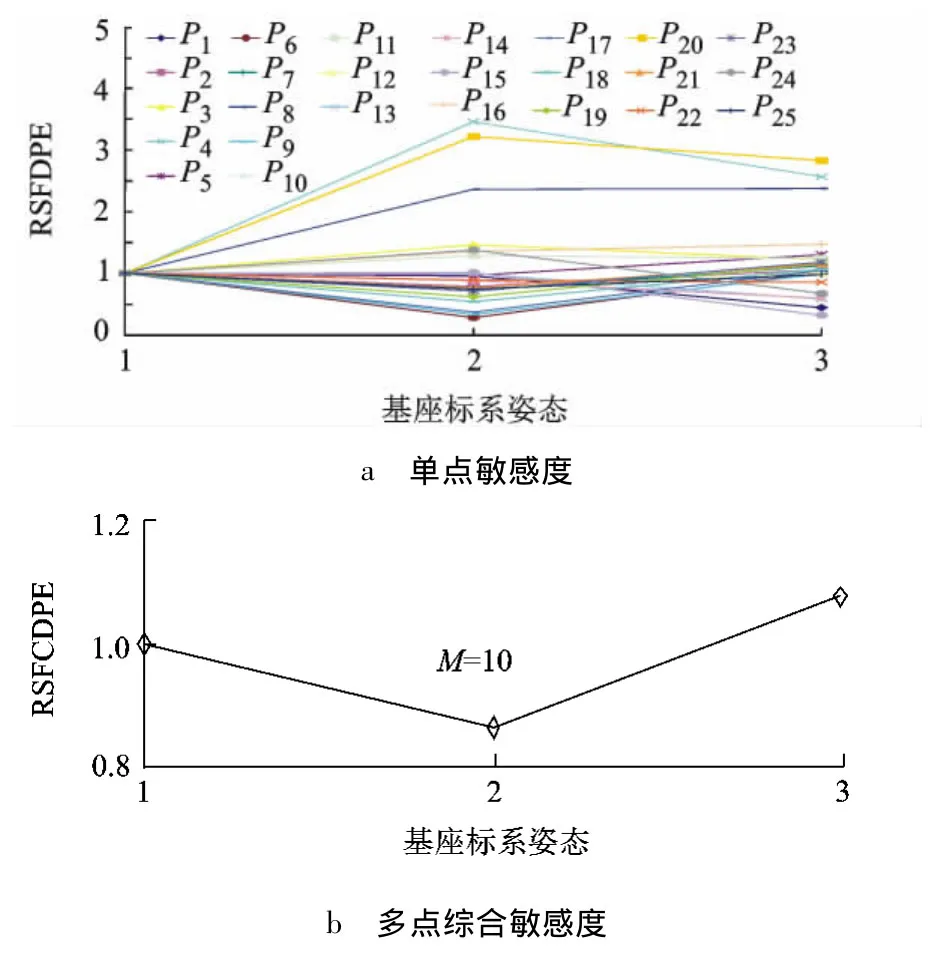
圖6 基坐標系姿態因素敏感度仿真結果
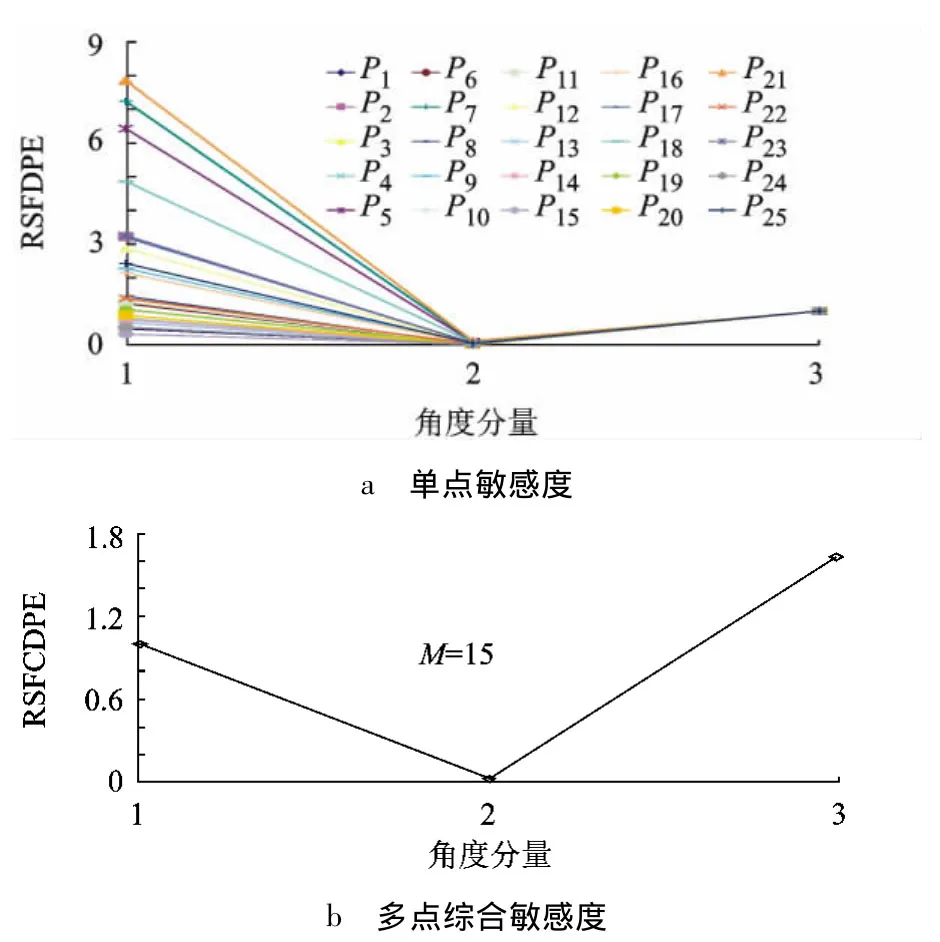
圖7 3類因素敏感度對比仿真結果
4 結論
1)各個平移因素對機器人定位誤差影響的敏感程度是一樣的.
2)從各因素的SPS仿真結果看,在同一個機器人位姿樣本點,各個角度因素對機器人定位誤差影響的敏感程度是不一樣的;同一個角度因素,在機器人不同的位姿樣本點對機器人定位誤差影響的敏感程度也是不一樣的.
3)從各因素的MPCS仿真結果看,各關節角、各連桿扭角及基坐標系姿態等因素對機器人定位誤差影響的敏感程度是不一樣的,且與所選的姿態樣本空間有關.
這些分析與仿真結果為進一步進行機器人定位誤差的有效標定打下了基礎.
References)
[1] Bai Y,Zhuang H Q,Roth Z S.Experiment study of PUMA calibration using a laser tracking system[C]//Proceedings of the IEEE International Workshop on Soft Computing in Industrial Application.Piscataway,NJ:IEEE,2003:139-144
[2] Alici G,Shirinzadeh B.A systematic technique to estimate positioning errors for robot accuracy improvement using laser interferometry based sensing[J].Mechanism and Machine Theory,2005,40:879-906
[3] Yu Alexander,Bonev Ilian A,Zsombor-Murray Paul.Geometric approach to the accuracy analysis of a class of 3-DOF planar parallel robots [J].Mechanism and Machine Theory,2008,43:364-375
[4] Fabricio Tadeu Paziani,Benedito Di Giacomo,Roberto Hideaki Tsunaki.Robot measuring form errors[J].Robotics and Computer-Integrated Manufacturing,2009,25:168-177
[5]焦國太.機器人位姿誤差的分析與綜合[D].北京:北京工業大學機械工程與應用電子技術學院,2002 Jiao Guotai.Analysis and synthesis of robot pose errors[D].Beijing:College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology,2002(in Chinese)
[6]龔星如,沈建新,田威,等.工業機器人的絕對定位誤差模型及其補償算法[J].南京航空航天大學學報,2012,44(4):60-64 Gong Xingru,Shen Jianxin,Tian Wei,et al.Absolute positioning error model of industrial robot and compensation algorithm[J].Journal of Nanjing University of Aeronautics & Astronautics,2012,44(4):60-64(in Chinese)
[7] Ting K,Long Y.Performance quality and tolerance sensitivity of mechanisms[J].Transactions of the ASME,1996,118:144-150
[8]郭劍鷹,呂恬生,王樂天.工業機器人運動學參數誤差兩步識別法[J].上海交通大學學報,2003,37(11):1670-1674 Guo Jianying,Lü Tiansheng,Wang Letian.Kinematic parameter error identification for industrial robot with two-step procedure[J].Journal of Shanghai Jiaotong University,2003,37(11):1670-1674(in Chinese)
[9]王偉,贠超.機器人機構精度綜合的正交實驗法[J].機械工程學報,2009,45(11):18-24 Wang Wei,Yun Chao.Orthogonal experimental design to synthesizethe accuracy ofrobotic mechanism [J].Journalof Mechanical Engineering,2009,45(11):18-24(in Chinese)