長基線系統應答器回收導引軟件開發*
2013-11-23 04:18:40
艦船電子工程 2013年5期
(91388部隊 湛江 524022)
1 引言
長基線水聲定位導航系統[1]是水下目標試驗必備的測量設備。但是試驗過程中在回收應答器時,應答器是否在原校準點位或應答器上浮后未能及時發現,都將會發生應答器丟失的安全隱患。開發本軟件,根據長基線潛艇導航系統測陣的原理,實時解算出待回收應答器的點位或運動軌跡,并給出包括工作母船位置、航跡、航速、應答器預定回收點、再校準后位置等回收態勢圖,引導測量船完成應答器的回收工作,將大大降低應答器丟失的風險。
2 測陣原理
帶DGPS接收機的工作母船在海底應答器斜上方海面按預定航路勻速航行并記錄軌跡,同時周期性的向海底應答器基陣發射詢問聲脈沖,通過測量聲信號在母船和應答器之間的雙程傳播時延Ti,采用橢球面交匯算法即可確定應答器的位置[2]。設有效測陣脈沖個數為N,母船以航速(vx,vy)沿航路航行(如圖1),得定位方程組[3]:

式(1)中:i為有效測陣脈沖序號;(xi,yi,zi)為第i個應答器的空間位置;Ti為目標到應答器i之間的聲雙程傳播時延;C為平均聲速;Tdi=T0i+T1+Ti,Tdi是水聲收發機發出詢問聲脈沖到接收到第i個應答器的應答聲脈沖為止的總時延,T0i為第i號應答器的電路延時,T1為水聲收發機的電路延時(T0i、T1試驗前可通過計量測得)。
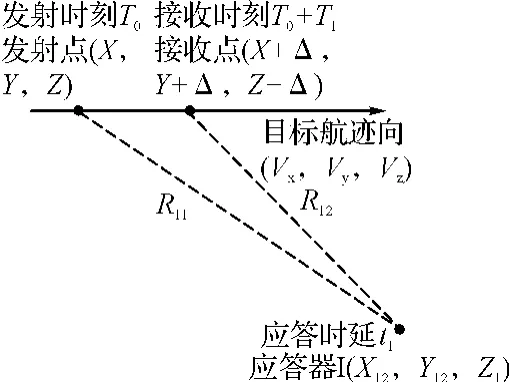
圖1 長基線導航定位原理示意圖
母船在多個位置測量,并記錄該位置坐標和水聲收發機所測距離,即對于任何一個應答器都可如式(1)建立相應的定位方程,一般來說,聯立三個方程就可以解得應答器(xi,yi,zi)的精確位置。
3 算法模型
3.1 最速下降法迭代模型[4~6]
水聲收發機發出詢問聲脈沖時刻母船到應答器的距離Rik,即得到下列式(2)所示的等效球面交匯方程組:


(x,y,z)為發出測距詢問聲脈沖時刻母船的位置。
先選取一組初值(x0,y0,z0),按最快收斂的方向進行迭代計算,以“失敗—成功”法求最佳步長,從而直指最優解,得到滿足一定精度要求的目標坐標。迭代計算數學模型為
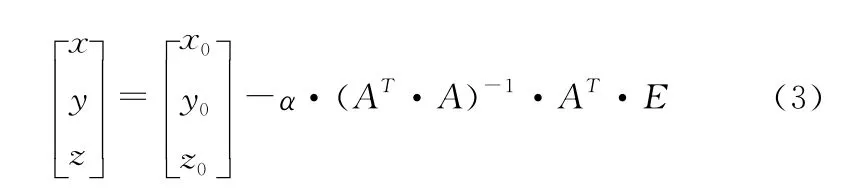
式中,(x,y,z)為本次迭代計算定位點的坐標,(x0,y0,z0)為前次迭代計算點的坐標,α為探索步長。
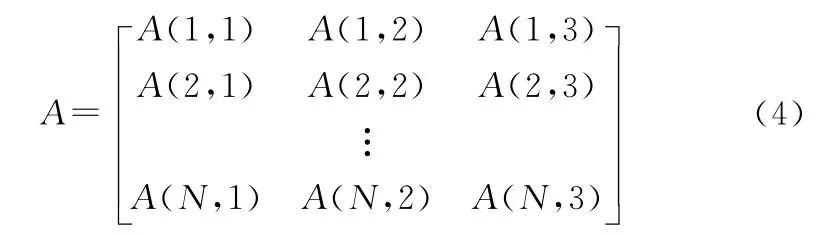
N為有效應答器數目。
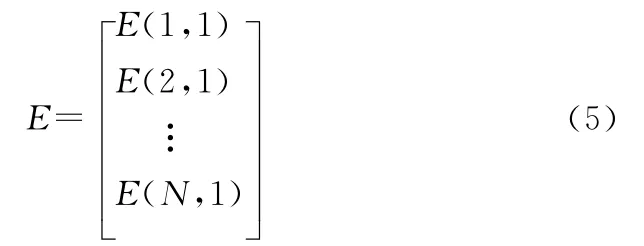
在式(4),(5)中
其中(Xi,Yi,Zi)為應答器i坐標,D(i,1)=Rik,母船到應答器i的距離。
均方誤差為

在程序中,式(3)的迭代計算不是無限的迭代計算下去,一般選用幾次迭代就可滿足測量定位要求[8]。
3.2 脈沖挑選[7~8]
為有效的從帶有脈沖干擾的脈沖序列中挑選出測距信號的直達聲,需對脈沖序列結構和特征的分析,建立一系列判據,根據這些判據為每一個有效脈沖評定品質因數,然后依據品質因數選出最優脈沖參與解算。
設每個陣元記錄了最多m個脈沖的信息傳給計算機,設Qai為直達脈沖品質因數,記f0為信號載頻,tki為第k幀收到的第i個脈沖信號的時延值,tk-1表示上個周期選出的最優脈沖,Ti表示脈沖的脈寬,則評定品質因數的判據如下:
判據①:制保留每個脈沖群中的首脈沖,若某脈沖與前一脈沖的時延差大于200ms,即可認為屬于另一脈沖群。
對于同一周期,當

對于相鄰周期,當
時,令Qai=Qai+5。
判據②:由于信道的影響,聲波的能量將逐漸衰減,一般情況下,直達聲先于反射聲到達,因而能量較大。
判據③:信道串漏脈沖和尖脈沖干擾的瞬時頻率方差較大,增加方差小的脈沖的品種因數。
當Vki>Vmax時,令Qai=0。
判據④:以最高航速估算,接收到的脈沖信號多普勒Δf在一定范圍內。當時,令Qai=Qai-4。
判據⑤:直達聲的脈寬不會過于小。
當Tki<Tmin時,令Qai=Qai-4。
判據⑥:比較當前脈沖與其它通道所有脈沖的時延,若其差值接近于0,則幅度小的脈沖的品質因數置0。如果幅度接近,則脈寬小的脈沖的品質因數置0。
當目標位于兩陣元中點時,理想情況下,其時延也應該相等,應用判據⑥必然會產生誤判[9]。在實際應用中,可以忽略這種誤判,原因是目標位于這種特殊位置點的概率很小,而且即使發生這種情況,可利用冗余陣元參加定位解算。
判據⑦:由于目標是運動的,如果是直達脈沖,則在相鄰周期一定的時延差內必定存在與之對應的脈沖,也就是時延的連續性。為此,我們將本幀的每個脈沖與上一幀的選出的脈沖相比,判斷其差值是否在一周期目標所能航行的最大距離范圍內。
4 誤差分析
對軟件算法模型及實際環境分析可知,軟件誤差主要受以下因素的影響[10]:
1)系統誤差。系統本身的電路時延造成的,通過計量得到其時延值,在解算中消減。
2)GPS定位誤差。由于DGPS本身的定位精度造成的偏差,這里主要表現在監測浮標的GPS位置數據上。實際應用中,我們將其當作真實值來參與解算,但其誤差存在必然性對定位的準確度造成的影響是不可忽略的,因此選用高精度的DGPS成為降低該誤差的一種途徑。
3)測時誤差。測距儀通過測量“詢問-應答”時間與平均聲速的乘積得到母船與應答器的距離,測時誤差的影響取決于應答器到兩測量點的距離差與測量點間距之比。
4)聲速裝訂誤差。由于水文條件的影響,且海洋環境的不確定性,參與計算的聲速值是一個折算后的平均值,由于聲速貫穿整個測量和解算的過程,故其精度對整個導引軟件定位精度都有影響。
5 實驗室功能性測試和驗證
在實驗室讀取海上試驗數據,裝訂當時試驗時聲速、應答器延時、聲頭深度、測陣后待回收應答器經緯度及深度值,對軟件進行公正性測試,運行圖如圖2,圖中顯示了待回收應答器實時解算位置及運動軌跡,工作母船當前位置及軌跡,并以圖表形式實時顯示斜距值,在列表中顯示工作母船和待回收應答器當前及歷史經緯度值、斜距值及航速。
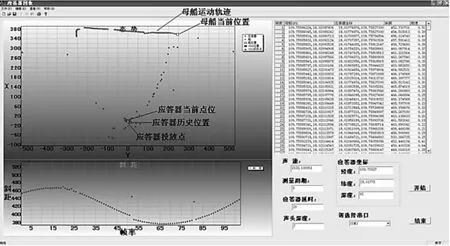
圖2 應答器回收導引軟件運行圖
6 結語
通過實驗室功能性測試和驗證,本軟件能夠實現實時解算并顯示出當前應答器位置及斜距值,同時在界面上還顯示工作母船當前位置及運動軌跡、航速應答器運動軌跡,用列表的形式顯示母船、應答器經緯度坐標、母船航速及斜距值并保存文件以備后期處理,可以完成應答器回收導引的功能。
[1]吳永亭,周興華,楊龍.水下聲學定位系統及其應用[J].海洋測繪,2003:18-2.
[2]王先華.長基線水下導航定位系統測陣校陣及系統集成[D].哈爾濱:哈爾濱工程大學碩士學位論文,2004:35-38.
[3]李莉.長基線陣測陣校陣技術研究[D].哈爾濱:哈爾濱工程大學碩士學位論文,2007:44-48.
[4]陳曉忠,梁國龍,等.非同步水聲定位技術及其性能評價[J].聲學學報,2003,28(4):358-360.
[5]封金星,丁士圻,惠俊英.水下運動目標長基線定位解算研究[J].聲學學報,1996,18(5):22-23.
[6]于平.兩種水聲導航定位算法的應用與分析[J].靶場試驗與管理,2004,1:15-18.
[7]于平,吳波,謝勝.水聲定位信號脈沖挑選方法[J].艦船電子工程,2012,32(2):123.
[8]王正明,易東云,等.測量數據建模與參數估計[M].國防科技大學出版社,1996:158-159.
[9]惠娟.水下多目標跟蹤定位算法研究[D].哈爾濱:哈爾濱工程大學碩士學位論文,2004:8-18.
[10]劉百峰,楊志權,趙珩.一種適用長基線系統絕對測陣的新航路[J].艦船電子工程,2011,31(6):173.
