環形激光器用于角速度測量的實驗
2013-12-01 01:54:40汪之國施建華譚中奇
物理實驗 2013年2期
關鍵詞:測量
汪之國,施建華,張 斌,譚中奇
(國防科技大學 光電科學與工程學院,湖南 長沙410073)
1 引 言
激光在測量領域具有重要的應用[1-2],常見的激光器如直腔或折疊腔屬于駐波激光器,其諧振腔中的光波沿光軸正向和反向各運行1次才能回到出發點,因此二者振蕩頻率相同,在腔內形成駐波[3].在環形激光器中,光波沿同一方向運行1周即可回到出發點,因此順時針光波和逆時針光波能夠以不同的頻率獨立振蕩,它們的頻差對各種非互易效應非常敏感[4].環形激光器相對慣性空間的轉動會導致順和逆時針光波產生可觀的頻差,因此可用作角速度傳感器.由于其功能和傳統的轉子陀螺相同,又被稱為激光陀螺[5].與機械轉子陀螺相比,激光陀螺有很多優點,如動態范圍大、比例因子精確、對加速度不敏感等,使它特別適合制成捷聯慣性導航系統,在慣性導航系統從平臺式到捷聯式的發展中起到了革命性的作用[6].反射鏡的散射使順、逆時針光波產生一定的耦合,導致激光陀螺存在閉鎖效應,因此工程應用的激光陀螺都要采取偏頻技術[7].激光陀螺主要按偏頻方案來進行分類:機械抖動激光陀螺采用機械抖動裝置,使激光陀螺腔體以高頻率和小幅度角向振動,從而大大減少它在鎖區的時間;四頻差動激光陀螺通過在1個腔體內建立2個陀螺,每個陀螺都進行恒定偏頻來避開鎖區,然后將2個陀螺的拍頻相減即可將偏頻扣除;塞曼偏頻激光陀螺是利用增益介質的塞曼效應,通過在增益區上施加縱向磁場來產生偏頻;速率偏頻采用機械轉臺,使激光陀螺腔體以低頻率大幅度角向反復轉動,以減小它處于鎖區的時間;磁鏡偏頻激光陀螺是將一面反射鏡做成磁鏡,利用磁光克爾效應產生偏頻.近10年來,國內激光陀螺技術發展迅速,應用領域不斷拓展.2000年前后機械抖動激光陀螺的幾個關鍵問題得到了解決[8-9].到2005年,激光陀螺捷聯慣導已達到優于1nmile/h的精度[10],能夠滿足絕大部分航空、航天上的應用要求.到2008年,采用旋轉調制技術的激光陀螺慣導已達到優于3天1nmile的精度[11-12],滿足長時間導航要求.為了使學生了解并掌握激光陀螺這種先進測量儀表的工作原理,國防科技大學開設了激光陀螺實驗課程.本文介紹了環形激光器測量角速度的原理,搭建了環形激光器系統,并證明它可用來測量角速度.
2 實驗原理
在圖1所示的環形干涉儀中,光波沿圓環傳播.在t=0時刻,光波從A點進入干涉儀,然后被分束器分成沿順時針和逆時針運行的2束光波,這1對行波不妨稱為反向行波.
當干涉儀靜止時,順時針和逆時針光波沿環路運行1周的時間相同,為

式中,R為干涉儀半徑,c為光速.

圖1 環形干涉儀
當干涉儀繞過圓環中心且垂直于干涉儀平面的軸以恒定角速度Ω旋轉(定義順時針方向為正),2束光波運行1周的時間將會產生差別,這是因為在光波運行過程中A點的位置發生了變化.順時針光波要多走一段距離才能回到A點,逆時針光波少走一段就能回到A點,二者再次到達A點的時間t±分別滿足

式中下標“-”和“+”分別對應逆時針和順時針.進一步化簡得
由于現實中干涉儀的線速度遠小于光速,這時可近似得到

反向行波由于運行時間不同而產生的光程差為

式中A=πR2表示環形干涉儀的面積.(5)式表明,在環形干涉儀中反向行波運行1周的光程差與光路圍成的面積和轉速成正比,該現象稱為Sagnac效應.
使用環形干涉儀作為實用器件的困難來自于靈敏度不夠,例如1925年蓋爾等人采用610m×335m的矩形環路來測量地球的自轉角速度卻只產生了0.13μm的光程差,約相當于1/4個干涉條紋[13].直到激光出現以后,利用環形激光器將反向行波運行1周的光程差轉換為諧振頻率差才使Sagnac效應獲得了實用價值.
環形激光器的諧振腔通常由不少于三面的高反射率反射鏡構成,反射鏡的幾何位置保證行波模式在諧振腔中自再現,一種典型配置如圖2所示.根據激光自再現條件,環形諧振腔內光波的諧振頻率必須滿足:

圖2 環形激光器

式中,q為縱模階數,〈L〉=nL為光波運行1周的光程.〈L〉的微小變化會導致諧振頻率發生微小變化:

將(5)式代入(7)式得Sagnac效應引入的頻差為

由于光頻非常高(1014Hz量級),光程的微小變化即可引起顯著的拍頻.將(8)式對時間求積分,可得時間t內拍頻振蕩周期數N 與環路轉過的角度θ之間的關系:

為了測量環形激光器中反向行波的頻差,采用圖3所示的棱鏡將順時針和逆時針光波以很小的夾角γ合并在一起,垂直光波的平面上的干涉場為

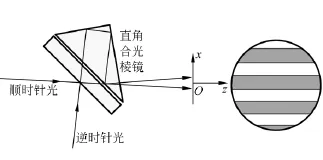
圖3 合光
與普通的雙光束干涉稍有不同,(10)式所表示的光場隨時間以頻率Δν余弦振蕩.將2個探測器A和B以一定間隔放在干涉場中,它們輸出的交流信號為

通過比較IA和IB的相位關系即可判斷環形激光器的轉動方向.
3 實驗裝置及結果
實驗裝置采用分立式環形激光器,包括He-Ne增益管、放置在2維調整架上的反射鏡、光電探測器以及步進電機轉臺和控制器等,如圖4所示,其中M1~M3為反射鏡;BS為分束器;BM為反射鏡.

圖4 實驗裝置
調整反射鏡和放電管,將環形激光器調整出光,合光并用光電探測器將光拍信號轉換為電信號.利用頻率計測量順時針和逆時針光波的頻差,采用1s的測量間隔.設定轉臺的角速度,從5°/s開始,步長為5°/s,直到30°/s,每次轉動范圍為30°,測出頻差隨角速度的變化曲線,如圖5所示.線性擬合得到比例因子為6 634.3Hz/[(°)·s-1],與理論值非常接近.
角速度從1°/s開始,以步長0.1°/s降低,轉動范圍為10°,測出頻差隨角速度的變化曲線,結果見圖6.線性擬合出比例因子為5 931.7Hz/[(°)·s-1],已經偏離理論值較多,這是由于閉鎖效應,角速度較小時將會偏離實際值.

圖5 頻差隨角速度變化曲線

圖6 接近閉鎖時頻差隨角速度變化曲線
4 結束語
搭建了環形激光器,測量了頻差隨角速度的變化關系,表明它可以用于角速度的測量,但在角速度較小時要注意閉鎖效應的影響.該實驗能夠提高學員的操作能力,了解并掌握激光陀螺的工作原理.
[1]閆璽,張景超,李賀,等.基于激光透射法測量平板玻璃的厚度[J].物理實驗,2012,32(5):1-5.
[2]從守民,路洪艷,劉保通.自組建激光干涉儀測量平行板楔角[J].物理實驗,2011,31(9):29-33.
[3]周炳琨,高以智,陳倜嶸,等.激光原理[M].4版.北京:國防工業出版社,2000:183-184.
[4]Kravtsov N V,Kravtsov N N.Nonreciprocal effects in ring lasers [J].Quantum Electronics,1999,29(5):378-399.
[5]Chow W W,Banacloche J G,Pedrotti L M,et al.The ring laser gyro[J].Reviews of Modern Physics,1985,57(1):61-104.
[6]King A D.Inertial navigation-forty years of evolution[J].GEC Review,1998,13(3):140-149.
[7]汪之國.異面腔四頻差動激光陀螺的零偏特性與電子系統設計[D].長沙:國防科技大學,2010.
[8]謝元平.機械抖動激光陀螺鑒相解調與穩頻技術的研究[D].長沙:國防科技大學,2000.
[9]湯建勛.機械抖動激光陀螺抖動偏頻系統的研究與設計[D].長沙:國防科技大學,2000.
[10]王宇.機抖激光陀螺捷聯慣導系統的初步探索[D].長沙:國防科技大學,2005.
[11]龍興武,湯建勛,王宇,等.船用激光陀螺慣導系統的研制[A].中國慣性技術學會第六屆學術年會論文集[C].2008:15-23.
[12]龍興武,于旭東,張鵬飛,等.激光陀螺單軸旋轉慣性導航系統[J].中國慣性技術學報,2010,18(2):149-153.
[13]Heer C V.History of the laser gyro[C].SPIE,1984,487:2-12.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
