基于組合定位系統實現精確測量水雷雷位
2013-12-02 06:07:42孫向前劉百峰
艦船科學技術 2013年4期
關鍵詞:測量
孫向前,劉百峰,李 斌,馬 一
(中國人民解放軍91388 部隊,廣東 湛江524022)
0 引 言
水雷在進行試驗考核時[1],雷位的精確測量是考核評定該型水雷的水面打擊半徑、攻擊區域、破壞半徑及近炸引信區域等關鍵性能指標的基礎。目前尚沒有對水雷雷位進行精確測量的專門測量系統,為了完成試驗任務,利用靶場現有水下目標導航定位系統和差分GPS (簡稱DGPS)組合,實現了測量布放于海底水雷雷位的需求,達到了預期效果。本文主要通過分析該方法的定位原理,討論消除隨機誤差的方法,達到進一步提高定位精度的目的[2]。經過海上工程實踐表明,這是一個行之有效的水雷水下目標方位測量方法,可滿足水雷位置測量定位精度要求。
1 測量系統構成及原理
1.1 測量系統構成
水雷雷位測量系統是由高精度DGPS 全套船載部分[3]和長基線水下導航定位系統部分組成。
1.2 工作原理
系統的定位原理:根據長基線定位原理[4],試驗時將系統應答器捆綁在水雷上,只要精確測量應答器坐標即可知道水雷雷位。試驗時,測量母船在DGPS 的引導下繞陣航行,周期性發射測陣詢問聲信號并接收各應答器應答聲信號,實時記錄“詢問-應答-接收”聲波時延及測量母船相應位置DGPS 坐標數據。解算時,針對各應答器,利用直角交匯原則,在相應位置提取測量船的DGPS 位置數據,通過空間曲面交匯法解算出各應答器的空間坐標。假定海底布設的應答器個數為N,測量母船以航速(vx,vy)沿航路航行,如圖1所示。水聲收發機周期性地發射測距詢問聲信號并接收各應答器應答聲信號,測定各“詢問一應答”信號的聲雙程傳播時延Ti,每組時延測量確定1 個以發射點和接收點為焦點的橢球面。定位方程組為

式中:i 為應答器序號;(xi,yi,zi)為第i 個 應答器的空間位置;Ti為目標到應答器i 之間的聲雙程傳播時延;c 為平均聲速;Tdi=T0i+T1+Ti,Tdi為水聲收發機發出詢問聲脈沖到接收到第i 個應答器的應答聲脈沖為止的總時延;T0i為第i 號應答器的電路延時;T1為水聲收發機的電路延時(T0i,T1試驗前可通過計量測得)。
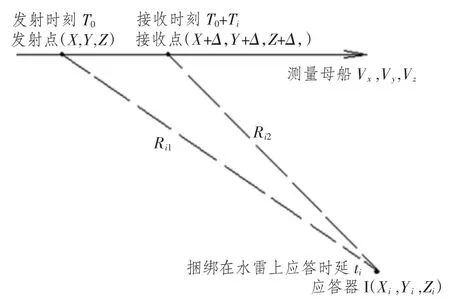
圖1 長基線導航定位原理示意圖Fig.1 The structure of navigation and Positioning for long base line measure system
應答器位置(xi,yi,zi)為待求未知量,其余均為已知量。母船在多個位置測量,并記錄該位置坐標和水聲收發機所測距離,即對于任何一個應答器都有多個測試點的位置坐標(x,y,z)和相應的距離值。求多個橢球面的共同焦點即可測量出陣元相對于大地的位置。求橢球面公共焦點法首先通過轉換橢球面方程組求近似解,然后利用近似解使定位方程組變為圓方程組求解。一般來說,有3 組方程就可以解得目標精確位置。
由于水雷是布放到海底,因此應答器(水雷)的深度參數zi通常可以通過其他途徑獲得,一般認為是已知量;所以式(1)中除 第i 號應答器(xi,yi,zi)坐標中的(xi,yi)為待求未知量,其余均為已知量。實際上為了提高測量精度,測量母船將沿著預先規定的優化航跡在DGPS 導引下連續航行,在多個點上進行測量,并取加權平均值,以獲得高精度。一般情況下,應答器(水下目標方位)位置總是概略知道,因此測量母船可以選擇以下多軌跡航行[5]:
1)在目標上方選擇“+”軌跡;
2)以目標為中心的圓形或正方形軌跡;
3)當目標未知時,測量母船在水聲應答測距范圍內任意航行。
圖2 為推薦使用的水下目標方位測量航路圖。

圖2 水下目標方位測量航路圖Fig.2 The flight path map of underwater object measure
同理,利用測距儀的頻分制,可同時測量多個水雷水下目標方位的大地坐標。
2 提高水雷雷位精度的方法
在同時對多個水雷目標進行連續測量的情況下,直接利用水聲測距儀接收的實時數據進行解算,則式(1)可近似為球面定位的一般形式[6]:

其中近似取:

式中:(xi,yi,zi)為第i 號 目標(水雷)的大地坐標,待測未知量;i=1,2,3,…,L 為被測量水雷目標的序列號;j=1,2,3,…,m 為數據的批號;k=1,2,3,…,n 為每批數據中的數據組序號;T 為測量母船詢問Pinger 信號周期;rijk為第i 號目標相應于第j 批數據中第k 幀 數組的斜距;tijk為第j 批數據中第k 幀數組周期計算機直接從測距儀讀取的第i 通道從發出測距詢問聲脈沖到收到應答聲脈沖為止的總時延;tijk-1為第j 批數據中第k-1 幀數組周期計算機直接從測距儀讀取的第i 通道從發出測距詢問聲脈沖到收到應答聲脈沖為止的總時延;c 為平均聲速。
測量作業開始時,在有利航段,計算機對DGPS 和水聲測距儀同步采集m 批數據(每批有n 個數據組)。例如,第i 號目標的第j 批數據的第k 號數據組表示為(xjk,yjk,z0,rijk),z0是船載聲頭深度,近似為固定值。將這些數據代入式(2),則每個目標可得到m×n 個解,剔除虛解后,進行加權平均,則可以消除隨機誤差,提高定位精度。
以下是對有利航段和加權平均的詮釋[4]。
當目標相對于2 個測量點的視角接近于90°時,圓交匯的定位誤差最小,這一點是很容易證明的。因此,在航行測量過程中對某一目標可形成正交交匯或接近正交交匯的航段稱為有利航段;而對大量測量結果進行平均時,對越接近正交交匯的數據組,應給予較大的權重,即根據交匯角大小作加權平均。對任意2 個測量點p(j,k)和q(m,n),其測量數組為(xjk,yjk,z0,rijk)和(xmn,ymn,z0,rimn),即分別為j批的k幀數組和m 批的n 幀數組,按余弦定理目標對p 和q 的視角為
式中:

分別為母船測量點p 和q 到目標斜距的平方及2 個測量點間距的平方。盡管式(4)中的(xi,yi,zi)為待求量,但在作視角估算時,可以取未經平滑處理的解算結果粗值。于是定義權系數

第i 號水雷位置坐標通過如下加權平均后確定:
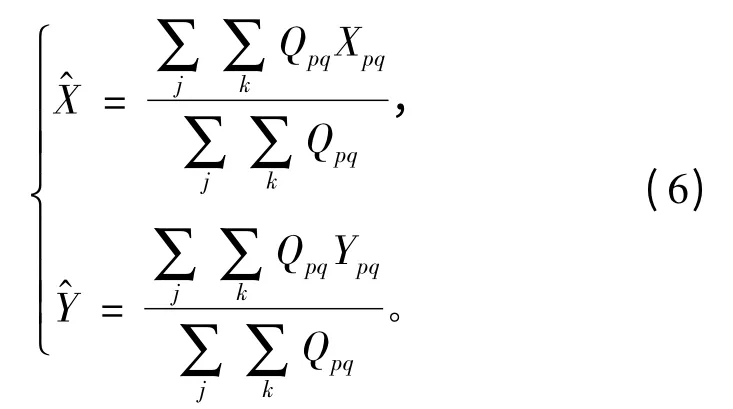
式中:j 為所有用來參與定位解算的批數據;k 為某批數據中用來參與定位解算的數據組;(Xpq,Ypq)為p 和q 兩測量點對i 號水雷位置的解算值;Qpq為p 和q 兩測量點的權系數;為加權平均后的i 號水雷位置坐標。
3 水雷雷位測量海上工程實施及精度驗證
3.1 水雷與應答器綁定方案
應答器要用繩索綁定[7]在“水雷-沉塊”這一連接體中間(見圖3)。另外,試驗中還須注意以下幾點:
1)水雷所使用釋放器的詢問頻率不能與應答器詢問頻率一致或相近,以免產生不必要的干擾。
2)應答器綁定位置應當滿足當測量母船在測量區錄取數據時,應答器的應答信號不會被雷體遮蔽。
3)與應答器捆綁好的水雷應在布雷船同一舷布放。
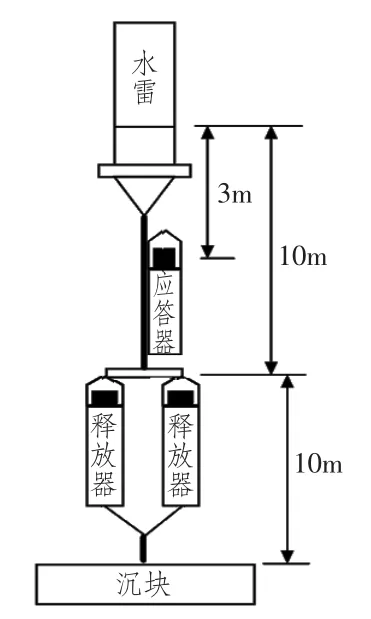
圖3 應答器與水雷捆綁示意圖Fig.3 The sketch map of responder and mine trussed
3.2 海上水下目標方位測量實施過程
根據試驗實施方案設定布雷線路,應答器與水雷綁定后,布雷船在DGPS 引導下航行到預定水雷布放點,聽候口令布放第1 個水雷,DGPS 記錄下實際布放點坐標;同理,依次布放其他水雷。布雷完畢后,根據DGPS 記錄的水雷布放點位置設定水下目標方位測量航路,由DGPS 引導測量船以小于4 kn航速按此路線航行,水下目標方位組合測量系統對水下目標方位實施測量,計算機實時記錄相關的測量參數。全部數據測量錄取完畢后,測量船聽令停機或機動,水下目標方位組合測量系統對測量數據進行回放分析、解算校準水下目標方位。
3.3 測量精度驗證
由于目前尚沒有更有效的、更精確的手段測量水雷的絕對地理坐標,因此無法對本文所討論的測量系統精度進行計量校準,只能利用長基線系統定位原理對測量母船進行定位,測量結果與船載DGPS 結果進行比對[8]。取應答器的大地位置坐標測量結果(xi,yi,zi)為陣元位置參數,利用該測量系統對測量母船實行反向定位測量,通過水下應答器陣解算出測量母船的軌跡與DGPS 測繪的測量母船軌跡相比較就能反映該組合測量系統對水雷的定位精度。
圖4 是在南海某海域試驗中使用半矩陣型航路測陣后給運動目標導航的軌跡,其中1#、2#、3#、4#應答器構成了一個小的測量陣,利用半矩形陣航路對海底應答器進行測陣。測陣完畢,利用應答器的測陣結果對測量母船進行導航。目標船以小于5 kn航速在陣中低速航行。

圖4 海試結果Fig.4 The result of examination on the sea
經過事后解算處理,將DGPS 對測量母船測量的軌跡與利用應答器對測量母船反向測量的軌跡比對統計。從圖4 中可以看到,2 條測量曲線基本重合,深色線為導航軌跡,淺色線為DGPS 測量結果。結果表明精度滿足水雷設計定型試驗時雷位測量要求。
4 結 語
本文敘述的組合定位測量系統是利用長基線導航定位系統測陣原理與DGPS 組合實現的,解決了因沒有專業的水雷雷位測控設備而無法給出精確雷位的問題。是利用現有測控裝備功能進行擴展應用的一成功實例。在海上工程中的成功應用,證明是行之有效的測量方法,具有較高的工程實用價值。
[1]李啟虎.水聲學研究進展[J].聲學學報,2001,26(4):295-301.
[2]李守軍,包根生,吳水根.水聲定位技術的發展現狀與展望[J].海洋技術,2005,24(1):131-135.
[3]田坦,劉國枝,孫大軍.聲納技術[M].哈爾濱:哈爾濱工程大學出版社,1996.
[4]王先華.長基線水下導航定位系統測陣校陣及系統集成[D].哈爾濱:哈爾濱工程大學,2004.
[5]KUSSAT N H,CHADWELL C D,ZIMMERMAN R.Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J].IEEE Journal of Oceanic Engineering,2005,30(1):153-164.
[6]R.J.尤立克.水聲原理[M].洪申,譯.哈爾濱:哈爾濱船舶工程學院出版社,1990.
[7]李莉.長基線陣測陣校陣技術研究[D].哈爾濱:哈爾濱工程大學,2007.
[8]李小民.GPS 在水下定位應用中的幾個關鍵問題研究[R].中科院聲學研究所,2002.34-40.
LI Xiao-min.Investigations on several key problems for the applications of GPS in underwater positioning[R].Report of the post doctor research,IOA of Chinese Science Academy,2002.34-40.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00