超磁致伸縮材料傳感/執行器的原理與應用*
2013-12-03 11:32:00賈振元王福吉劉慧芳
振動、測試與診斷 2013年4期
賈振元,王福吉,鄒 君,劉慧芳
(大連理工大學精密與特種加工教育部重點實驗室 大連,116024)
引 言
各種智能材料如壓電陶瓷、形狀記憶合金以及磁致伸縮材料的應用,使得原本依靠精巧機構、精密檢測和精確控制完成的精密微驅動解決方案可以依靠智能材料的功能性來實現。不僅使結構變得緊湊簡捷、精密微驅動作業能夠滿足更高的要求,而且精度由傳統的微米級提高到納米級。上述各種功能材料有著各自的特點和應用領域。超磁致伸縮材料作為一種新型功能材料,具有大磁致伸縮系數、高能量密度、低磁場驅動、高磁機轉換效率以及快速響應等優點。該材料具有強磁致伸縮正效應、逆效應以及正逆耦合效應,表現出雙向能量轉換特性。利用磁致伸縮正效應可制作驅動器或振動器,實現力、微位移驅動或振動控制;利用磁致伸縮逆效應可制作傳感器,實現力、力矩和位移等物理量的感知;利用磁致伸縮正逆耦合效應,可以開發集驅動、力測量、輸出力感知和輸出力可控等功能于一體的精密驅動器件。
筆者從超磁致伸縮材料應用形式分類為切入點,分析了超磁致伸縮材料磁致伸縮正效應、逆效應以及正逆耦合效應的機理,按照功能對利用各種效應開發的器件原理及應用現狀進行了分析與闡述。
1 超磁致伸縮材料
1.1 超磁致伸縮材料簡介
鐵磁材料和亞鐵磁材料由于磁化狀態的改變,其長度和體積都要發生微小的變化,這種現象稱為磁致伸縮現象。20世紀70年代初,美國海軍水面武器中心A.E.Clark博士和Iowa大學Ames稀土材料研究所合作開發出了成分為 Tb0.3Dy0.7Fe1.95的磁致伸縮材料,由于其磁致伸縮系數比一般磁致伸縮材料高約102~103倍,故稱之為超磁致伸縮材料(giant magnetostrictive materials,簡稱 GMM)。
GMM按組成分類主要有稀土金屬、稀土-過渡金屬化合物、稀土氧化物、錒系金屬化合物和超磁致伸縮復合材料。GMM按材料形狀大體分為兩種:a.超磁致伸縮棒材具有優于傳統材料以及壓電材料的特點,其磁致伸縮應變大、能量密度高、機磁(電)耦合系數大、響應速度快、輸出力大、頻率特性好、頻帶寬、居里溫度高、逆磁致伸縮效應明顯;b.超磁致伸縮薄膜利用超磁致伸縮靶材,通過物理沉積的方式在非磁性基片上制備出具有磁致伸縮能力的薄膜材料,它具有體積小、性能穩定、可靠性高、高頻響應快和靈敏度高等特點。
1.2 GMM的磁致伸縮正、逆效應機理
GMM具有強磁致伸縮正效應和磁致伸縮逆效應,在工作過程中表現出雙向能量轉換特性。GMM磁致伸縮正、逆效應現象較為復雜,從磁致伸縮表現形式及產生原因的角度出發,能較為清楚地理解磁致伸縮正、逆效應的發生機理。
1.2.1 GMM的磁致伸縮正效應機理
稀土鐵磁材料及亞鐵磁材料在外加磁場作用下,磁化狀態的改變引起尺寸發生微小的變化,這種現象稱為磁致伸縮正效應(又稱Joule效應)。
磁致伸縮的產生源于3個方面,即自發變形、形狀效應和場致變形。自發變形和形狀效應的產生是材料本身固有的,不受外磁場的影響。場致變形是由自旋與軌道耦合能和物質的彈性能平衡而產生的,與磁化過程密切相關,并且隨應力變化而變化。通常所說的磁致伸縮是指由場致變形引起的,外磁場作用下材料尺寸發生變化的微觀過程如圖1所示。

圖1 場致變形過程中磁疇變化示意圖
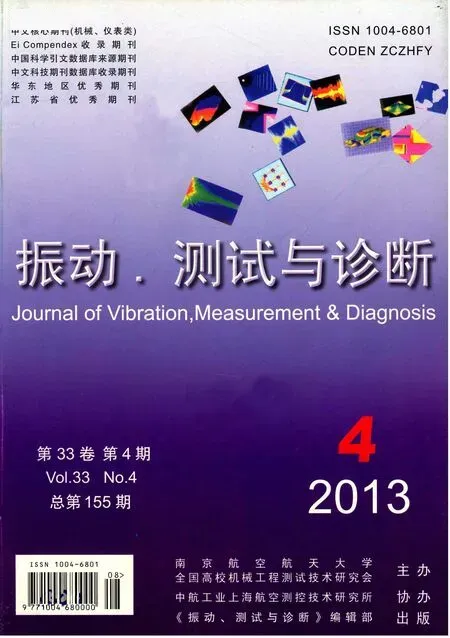
磁致伸縮過程中磁能轉換成機械能,在無機械約束時通常以位移的形式輸出,如圖2所示。在有機械約束時以位移和力的形式輸出,如圖3所示。利用磁致伸縮正效應可制作執行器,實現驅動功能,應用在精密與超精密加工、流體機械、直線馬達、聲吶系統和生物醫學等領域[1-6]。
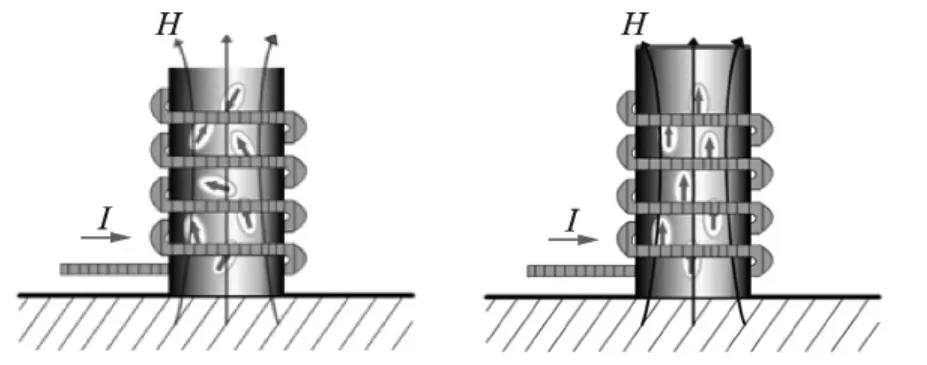
圖2 無機械約束磁致伸縮正效應機理示意圖
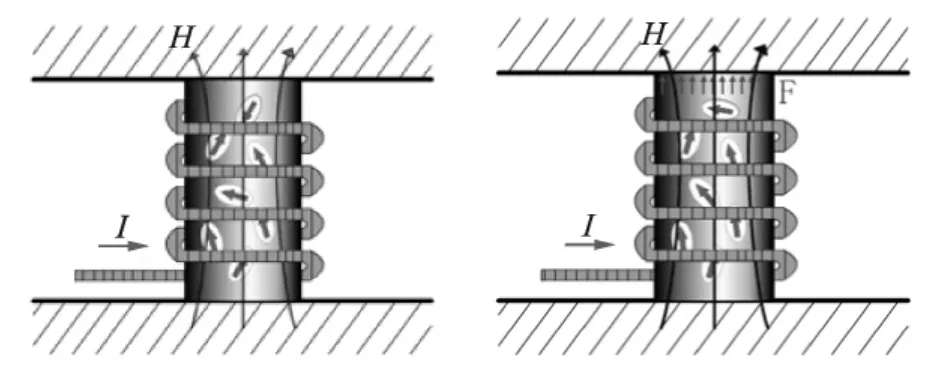
圖3 有機械約束磁致伸縮正效應機理示意圖
1.2.2 GMM的磁致伸縮逆效應機理
鐵磁性材料受到機械力作用,材料產生應變和應力同時,內部的磁化狀態也隨之改變,導致磁導率發生變化的現象稱為壓磁效應,即磁致伸縮逆效應(又稱Villari效應)。
鐵磁材料發生磁致伸縮逆效應時,磁化強度及磁通密度發生變化,在該過程中機械能轉換成磁能,如圖4所示。若GMM棒材外部纏有線圈,變化的磁通密度將引起法拉第效應,產生感應電動勢,如圖5所示。利用磁致伸縮逆效應可制作力和位移等傳感器。隨著研究的深入,已從傳統的力學、磁學領域擴展到了聲學和生物醫學等新型應用領域。
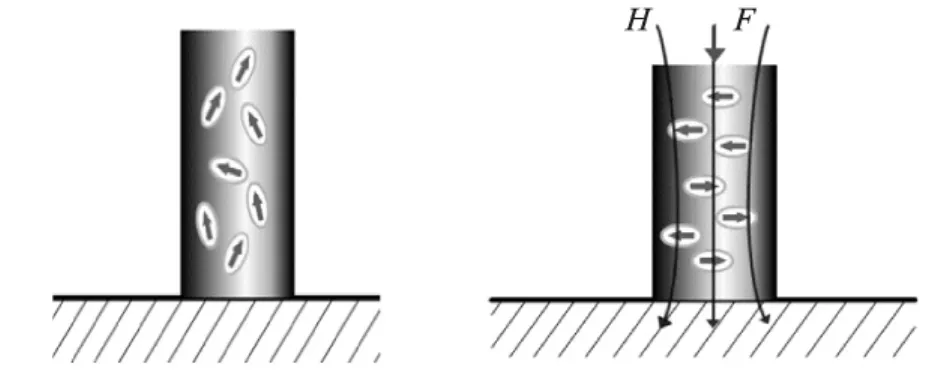
圖4 無線圈的磁致伸縮逆效應原理示意圖
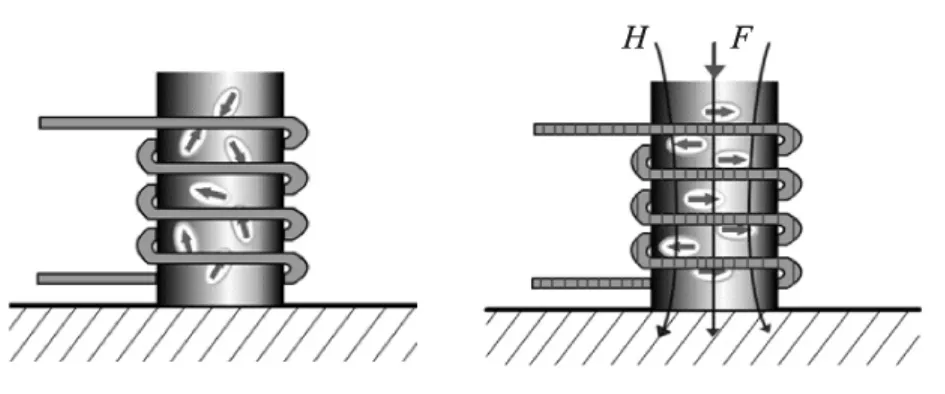
圖5 有線圈的磁致伸縮逆效應原理示意圖
1.2.3 磁致伸縮正逆效應耦合機理
磁致伸縮材料具有雙向能量轉換的功能,當GMM工作在機械約束條件下,磁場作用會使GMM發生磁致伸縮正效應,GMM產生輸出位移的同時也有力輸出,機械約束的反作用力使GMM發生磁致伸縮逆效應,對其內部磁化狀態產生影響。由于磁致伸縮正效應與逆效應的同時存在,使GMM中原本互相獨立的兩個子系統——磁系統和機械系統發生耦合[7-8]。若通過改變磁場強度和磁通密度來增加材料的磁能,則增加的磁能中將有一部分轉換為彈性能,導致材料的應力和應變發生變化;反之,如果通過改變材料的應力和應變來增加材料的彈性能,則增加的彈性能中也將有一部分轉變成材料的磁能[9]。因此,利用GMM在機械約束狀態下存在的磁致伸縮正逆效應耦合的特性,可實現在向外界輸出力的過程中同時對輸出力進行感知,以及實現對輸出力的可控功能,開發具執行和傳感功能于一體的磁致伸縮器件。由于磁致伸縮正逆耦合效應的解耦過程十分復雜,制約了傳感執行功能一體化器件的研發。
2 超磁致伸縮器件的研究與應用
2.1 傳感器的研究與應用
利用GMM的磁致伸縮逆效應,可以實現材料在傳感方面的應用。目前,關于GMM的磁致伸縮逆效應特性的應用研究按感知物理量分類,主要分為力矩測量、力測量、位置測量以及電能收集等方面。
使用GMM實現對某些非電量的測量始于19世紀,發展于20世紀后期。現已從最初的應力、應變、磁場傳感器擴展到水聲換能器、電聲換能器、磁彈性延遲線數字化儀、磁聲鍵盤系統、生物機械傳感器和呼吸傳感器等,應用領域不斷拓展。
2.1.1 力矩測量
使用GMM棒材或是將超磁致伸縮非晶帶纏繞在軸上可制成非接觸式的力矩傳感器。它是基于力矩施加在軸上產生和軸線呈±45°的相反符號的+τ和-τ應力的原理制成的。當在GMM軸或磁致伸縮非晶帶軸上施加力矩,沿著+τ和-τ方向上的磁特性就會改變(韋德曼效應)。應用如圖6所示的一套正交線圈,采用微分方式或直接采用單個霍爾效應傳感器及類似的磁強計即可檢測出磁特性的變化。這種類型的傳感器可應用于汽車和航空工業的遙控轉向系統[10]。
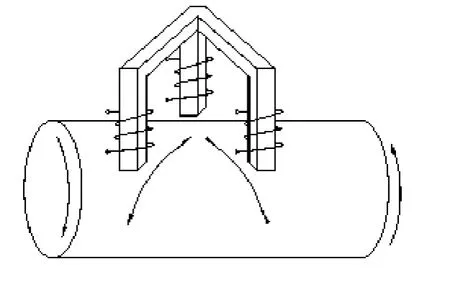
圖6 非接觸式力矩傳感器
應用GMM在扭轉應力作用下產生磁導率變化的原理,設計出非接觸力矩傳感器。其原理是采用激勵線圈提供交流激勵磁場,并將兩個傳感線圈串接在鉆頭上,如圖7所示,一個線圈在排屑槽上,另一個在鉆柄上(柄的磁導率變化要小于槽的磁導率變化),工作力矩由兩個感應線圈檢測出來。因施加轉矩使鉆頭磁導率變化,在感應線圈中產生的微分電壓形成了傳感器輸出量。由于磁性的鋼材或合金有很強的機械強度,因此其檢測對靈敏度要求不高。

圖7 鉆頭扭矩傳感器
2.1.2 力測量
利用GMM的磁致伸縮逆效應,使用晶態或非晶態GMM構建力傳感器,實現力的測量。美國韋恩州立大學學者Kleinke和Uras利用兩個柱狀18#鋼作為敏感元件,分別設計了非接觸式和接觸式磁致伸縮力傳感器,如圖8所示[11-12]。
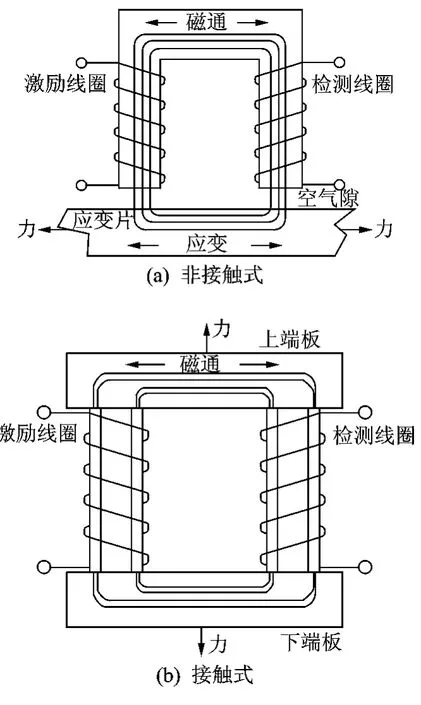
圖8 非接觸式和接觸式磁致伸縮力傳感器原理圖
當受外力作用時,非接觸式磁致伸縮力傳感器底部應變元件發生形變,使整個磁路中磁場狀態發生改變,檢測線圈中產生了感應電壓,實現力測量。對于接觸式磁致伸縮力傳感器,力作用使敏感元件產生形變并引起磁路狀態發生變化,通過監測線圈中的感應電壓實現對力的測量。圖9(a),(b)分別為磁致伸縮力傳感器的剖視圖和機械模型。
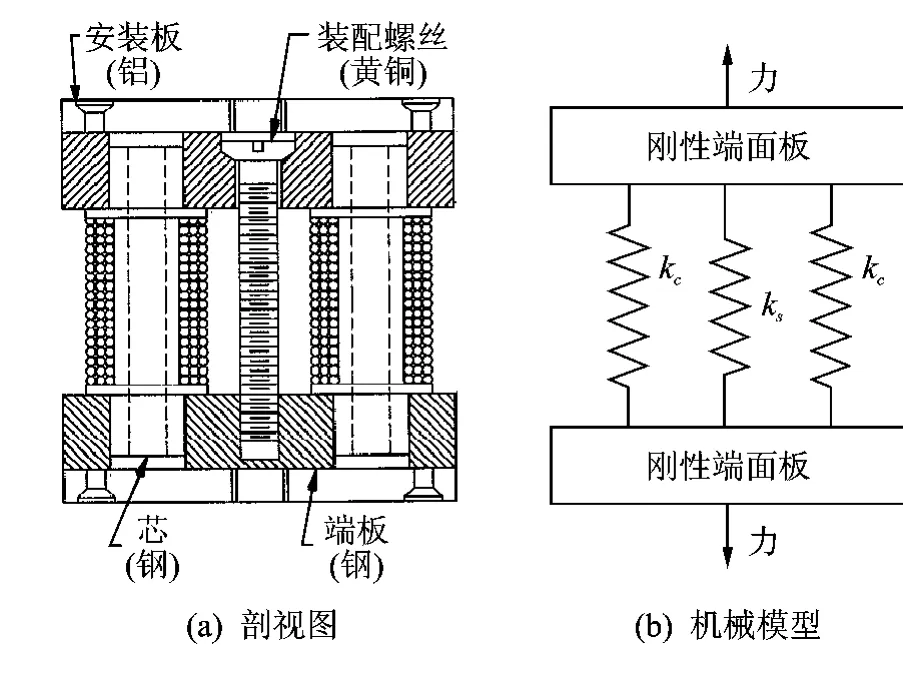
圖9 磁致伸縮力傳感器剖視圖和機械模型
文獻[13]以鎳鐵合金作為敏感元件,采用降噪自感的方法設計了一種環形磁致伸縮力傳感器。該力傳感器克服了對外界電磁干擾敏感性的問題,設計達到了凈零的效果,如圖10所示。Toriia等[14]采用Tb-Dy-Co超磁致伸縮薄膜研制了一種微型力傳感器,該微型傳感器結構輕小、設計新穎,如圖11所示。

圖10 環形磁致伸縮力傳感器原理圖
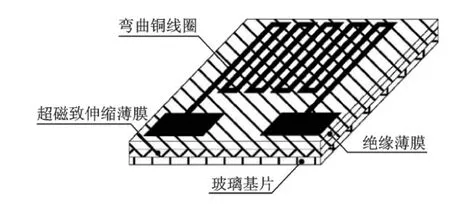
圖11 超磁致伸縮薄膜微型力傳感器
河北工業大學閆榮格等以GMM棒作為敏感元件,采用永磁鐵作為預磁化場,設計了測量靜態力的磁致伸縮力傳感器,如圖12所示。通過高斯計直接檢測空氣隙中磁通密度變化情況,實現力測量,省略了電磁信號的放大環節,簡化了裝置結構,同時避免了直流電源引起的發熱問題。
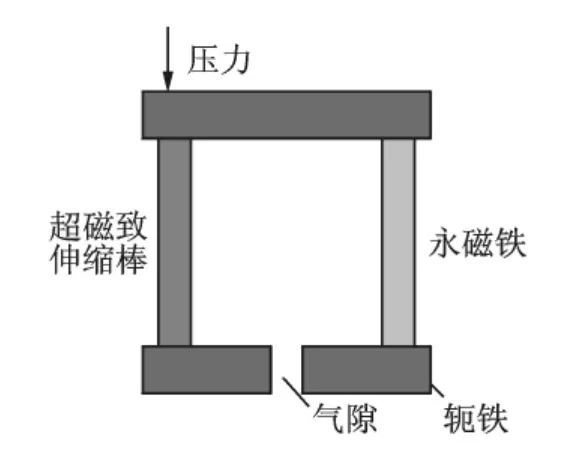
圖12 永磁式磁致伸縮力傳感器原理圖
大連理工大學的賈振元等利用軟磁坡莫合金作為磁彈性材料,研制了壓磁式力傳感器并設計了相關的測試系統。
2.1.3 位置測量
應用GMM棒和聲學波導可研制出磁致伸縮波導位置傳感器[15],結構如圖13所示。其工作原理是利用永磁鐵和GMM波導的相互作用使材料特性發生改變,利用這一特性即可實現位置的檢測。2001年,大連理工大學賈振元等利用GMM研制了磁場與位移自感知型超磁致伸縮微位移器件及控制系統,如圖14所示。
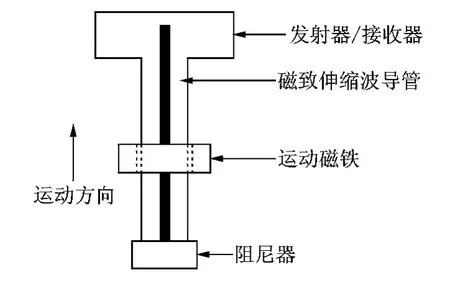
圖13 磁致伸縮波導位置傳感器
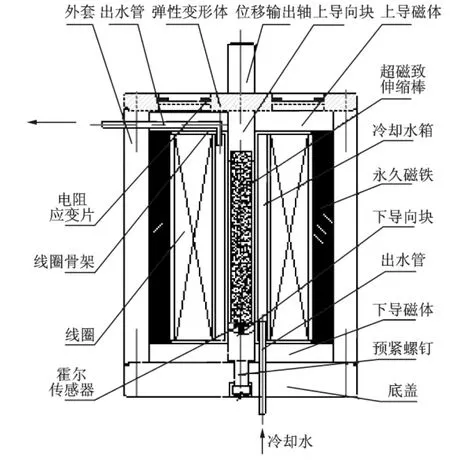
圖14 位移感知型超磁致伸縮微位移執行器結構原理圖
2.1.4 電能收集裝置
Davino等[16]研究了磁致伸縮能量收集裝置,實驗裝置如圖15所示。通過時域測量,分析了影響總收集能量的偏置磁場、外界負載等參數對機械阻尼的影響,研究結果為實現從小機械振動中收集更多的能量提供了很好的指導性。

圖15 磁致伸縮電能收集器原理及樣機
2.2 執行器的研究與應用
利用GMM磁致伸縮正效應可以研制各種執行器件,具有溫度范圍寬、低壓可操作性、無纜驅動、輸出力大、頻響相對平滑、響應速度快、響應頻率和控制精度高等特點。根據執行器的輸出形式可分為微位移執行器和力執行器。Etrema公司針對不同需求設計了多種執行器,例如,一種GMA輸出位移和力可達250μm和2.2kN,工作頻率可達2.5 kHz,工作溫度范圍[17]為-20~100℃。
2007年,韓國機械與材料研究所Moon等[18]研制了一種線性磁致伸縮執行器及具有線性二次反饋控制器的實時數字控制系統,線性位移范圍可達到27μm,如圖16所示。

圖16 線性磁致伸縮執行器
2008年,日本Toshiyuki等[19]利用Galfenol針作為驅動單元制成微型磁致伸縮振動器,如圖17所示。在高于30kHz的帶寬下,位移可達1.2μm,此振動器可作為揚聲器。
國內,2001年,大連理工大學賈振元等采用GMM研制的磁場與位移自感知型超磁致伸縮微位移執行器,執行器的響應頻率可達1kHz,輸出精度可達0.3μm。
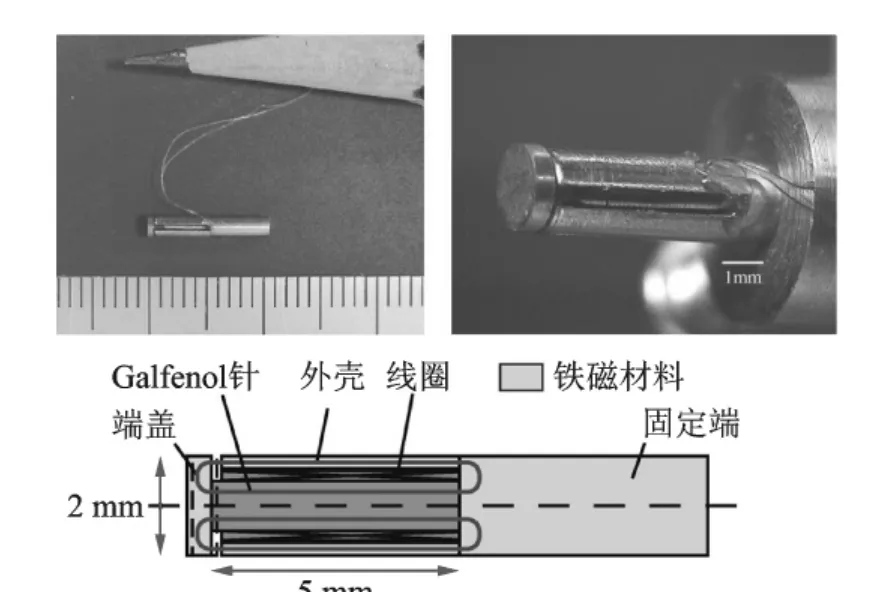
圖17 利用Galfenol制成的微執行器
浙江大學和河北工業大學也開發了超磁致伸縮微位移執行器,并使用DSP研制了控制器。2009年,中國計量學院周浩淼等建立了一種適用于超磁致伸縮棒材和薄膜的通用型磁致伸縮本構模型,該模型可描述不同預緊力作用下材料產生的最大磁致伸縮應變及飽和磁致伸縮應變。
2.3 傳感功能與執行功能一體的器件
利用GMM的磁致伸縮正效應、逆效應以及正逆耦合效應,可實現執行功能、力測量的傳感功能、輸出力感知以及輸出力可控等功能。
Pratt等[20]提出了磁致伸縮自感知執行器的概念,并嘗試用于主動隔振。Fenn等[21]將磁致伸縮執行器用于振動被動控制和速度感知。國內,大連理工大學和浙江大學也在進行基于GMM的自感知執行器研究。
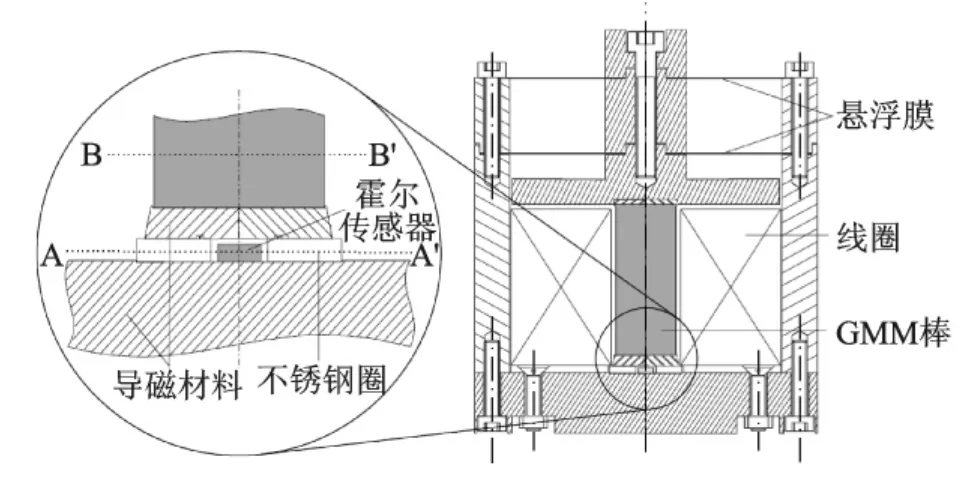
圖18 帶霍爾傳感器的磁致伸縮執行器結構示意圖
2007年,德國薩爾大學的Kuhnen等[22]研制了集執行和傳感一體的GMM自感知驅動器,并研究了其積分控制算法,如圖18所示。此研究的核心是基于算子信號處理思想與積分反饋控制器相結合,這便產生了所謂的積分反饋控制的自感知磁致伸縮執行器。這種控制方法不需要外部的位移或力傳感器,也能很好地補償由于執行器剛度有限而引起的滯后效應。
大連理工大學賈振元等以GMM棒為驅動元件[23-26],研究了一種具有驅動、力測量、輸出力感知和輸出力可控等多種功能于一體的磁致伸縮器件。通過研究超磁致伸縮材料工作過程中磁致伸縮正逆耦合作用機理,從超磁致伸縮材料內部能量角度出發,建立了正逆耦合作用下,輸出位移與力和磁化強度的關系,如式(1)所示,為實現輸出力感知、輸出力可控過程中對控制電流的求解提供了理論依據。
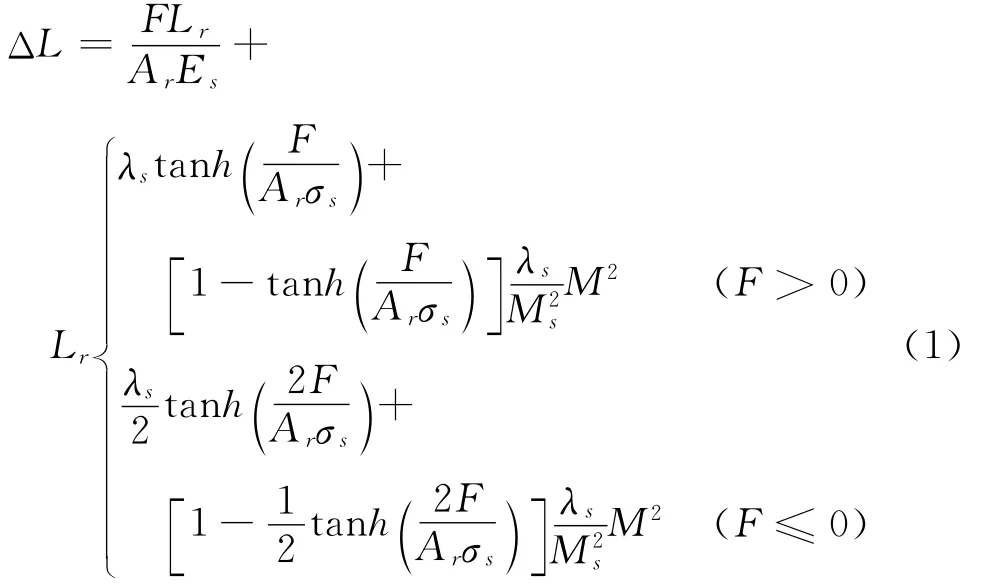
當GMM棒內磁化強度已知時,根據GMM棒的輸出力,利用式(1)可以確定GMM棒產生的位移。當GMM棒內磁化強度已知時,根據GMM棒的位移,利用式(1)可以確定GMM棒的輸出力。
為了方便描述磁致伸縮正逆效應耦合作用,對耦合過程進行了簡化,即在研究過程中忽略比較微弱的磁致伸縮正逆效應的第2次、3次、……耦合作用,只考慮磁致伸縮正效應和逆效應之間發生的第1次耦合作用。此時GMM棒內的總磁化強度M由只與工作磁場有關的磁化強度部分MH和只與應力有關的磁化強度部分Mσ構成。根據磁化強度與磁場強度之間的關系、磁化強度與應力之間的關系,經過推導最終得到了GMM在磁場和力共同作用下,磁致伸縮正效應與逆效應耦合后其內部總磁化強度與磁場和應力的關聯關系
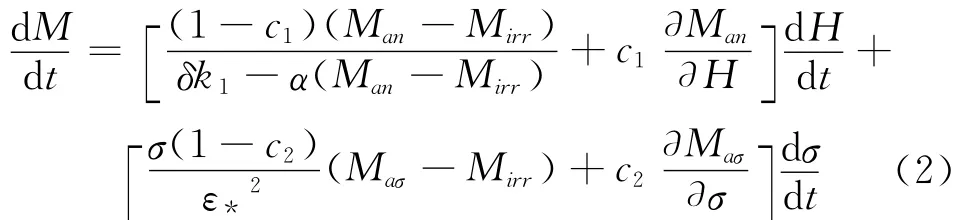
磁場強度以及應力隨著時間的變化可分別依據工作磁場和作用在GMM上的力來確定。
在此基礎上,結合霍爾效應和法拉第電磁感應原理,建立力測量過程中霍爾電壓與力的關系(式(3))、感應電壓與力的關系(式(4)),實現了力測量的功能。
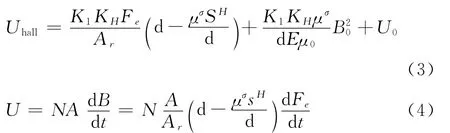
其中:感應電壓與GMM棒的橫截面積成反比,與感應線圈線圈匝數、橫截面積及外力變化率成正比;對于固定的GMM棒和感應線圈,N,A,Ar保持不變,因此感應線圈中的感應電壓只與外力Fe有關。
力測量原理是當GMM棒單獨作為力傳感器中的敏感元件進行力測量時,其內部磁化狀態由外力決定;因此,通過檢測磁通密度獲得磁化強度可實現力測量功能,如圖19所示。
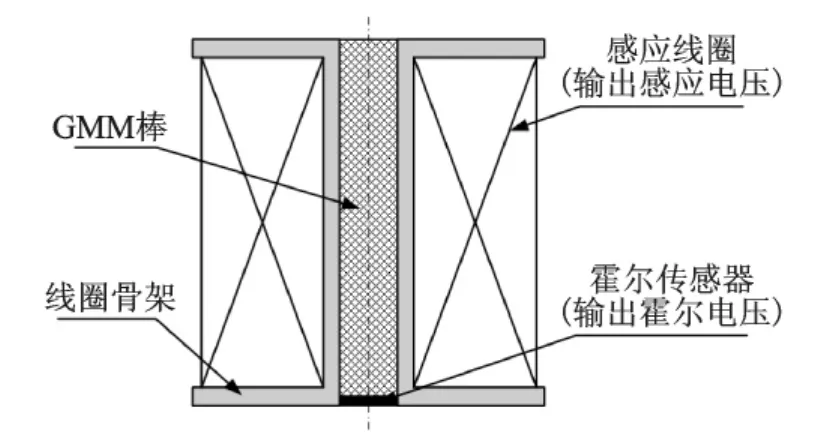
圖19 力測量的實現原理圖
為實現力感知,就要對正逆耦合關系解耦,以建立的輸出位移與力和磁化強度的關系(式1)、內部磁化強度的量化方程(式2)為基礎,提出了兩種硬軟件相結合的進行解耦獲得輸出力的方法。即通過霍爾傳感器或感應線圈測得磁通密度,經計算獲得磁化強度,并通過解耦計算實現輸出力的感知,實現原理如圖20所示。
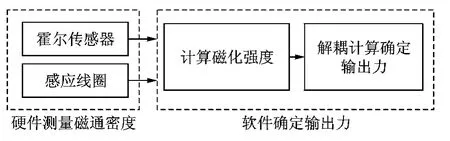
圖20 輸出力感知的實現原理圖
針對輸出力可控功能,提出一種利用磁致伸縮正逆耦合效應映射關系求解控制電流與PID結合的控制方法,開發了輸出力控制系統。以超磁致伸縮力傳感執行器對其自身的輸出力大小進行實時感知為基礎,根據輸出力目標,通過調整工作電流,可實現執行器輸出力的可控。控制原理如圖21所示,執行器輸出力的控制過程主要包括3部分。第1部分為輸出力的感知:通過霍爾傳感器輸出的霍爾電壓Uhall或電橋電路分離出的線圈中的感應電壓信號Um,得到GMM棒內部實際磁通密度的測量值,經計算獲得GMM棒內部的磁化強度,結合反復迭代的方法感知GMM棒的輸出力。第2部分為計算控制電流:根據輸出力的目標值,結合輸出力的感知結果,通過基于GMM棒輸出位移與力和磁化強度的關系、GMM棒內磁化強度的量化方程的控制電流求解方法,計算輸出力達到目標值所需要的工作電流。第3部分為控制工作電流輸出:根據計算得到的工作電流,通過計算機系統向可編程電源發送指令,控制電源為執行器的線圈供給此電流。
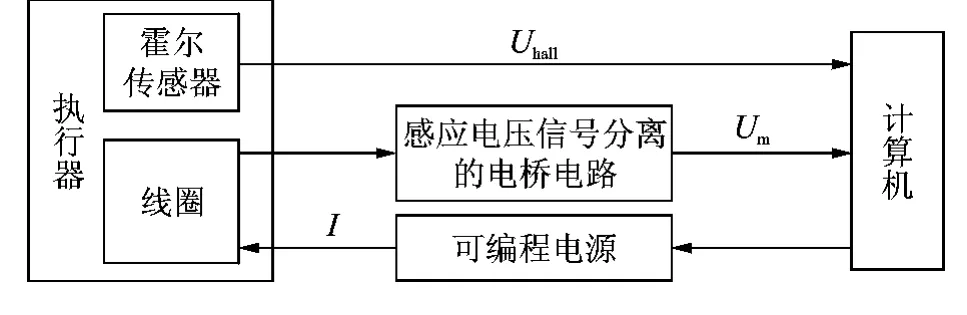
圖21 超磁致伸縮力傳感執行器輸出力可控的控制原理
結合力測量、輸出力感知、輸出力可控的實現方法,賈振元教授開發出了集微位移輸出、力測量、輸出力自感知和輸出力可控等多功能于一體的超磁致伸縮力傳感執行器,結構如圖22所示,實物如圖23所示。

圖22 超磁致伸縮力傳感執行器三維結構圖

圖23 超磁致伸縮力傳感執行器實物
帶有力傳感器功能、執行傳感功能及輸出力可控功能的超磁致伸縮力傳感執行器的研制,為磁致伸縮正逆效應的復合應用及加快新型多功能磁致伸縮器件的發展提供了重要的理論支持和一種新的應用途徑。
3 結束語
隨著控制和驅動向精密化的發展,傳感器、執行器也隨之向微型化、智能化、多功能化和高精度等方向發展。集傳感和執行功能于一體的器件則是控制驅動領域發展的趨勢。利用GMM優異特性可以開發各種傳感器、執行器,也可以開發集傳感、執行、力感知、輸出力可控等功能于一體的器件,最終形成多功能、高度集成的完備一體化自動控制驅動設備,這也是超磁致伸縮材料未來應用的發展趨勢。
[1] Miesner J E,Teter J P.Piezoelectric/magnetostrictive resonant inchworm motor[C]∥Proceedings of SPIE Smart Materials.Orlando,FL:[s.n.],1994,2190:520-527.
[2] Venkataraman R,Dayawansa W P,Krishnaprasad P S.The hybrid motor prototype:design details and demonstration results[R].Maryland:University of Maryland,1998.
[3] Clephas B,Janocha H.New linear motor with hybrid actuator[C]∥Proceedings of SPIE Smart Structures and Materials.San Diego,CA:[s.n.],1997,3041:316-325.
[4] Clephas B,Janocha H.Extended perfomance of hybrid actuators[J].Applied Mechanics and Engineering,2000,5(1):157-168.
[5] Uneo T,Keat C S,Higuchi T.Linear step motor based on magnetic force control using composite of magnetostrictive and piezoelectric materials[J].IEEE Transactions on Magnetic,2007,43(1):11-14.
[6] Duan Y F,Or S W.Self-sensing tunable vibration absorber incorporating piezoelectric ceramic-magnetostrictive composite sensoriactuator[J].Smart Materials and Structures,2011,20(085007):1-8.
[7] Besbes M,Ren Z,Razek A.Finite element analysis of magneto-mechanical coupled phenomena in magnetostrictive materials[J].IEEE Transactions on Magnetics,1996,32(3):1058-1061.
[8] Gros L,Reyne G,Body C,et al.Strong coupling magneto mechanical applied to model heavy magnetos-trictive actuator[J].IEEE Transactions on Magnetics,1998,34(5):3150-3153.
[9] Ikeda M,Uemura K,Sasaki I,et al.Factors affecting the ouput voltage of a magnetostrictive torque sensor constructed from Ni-Fe sputtered films and a Ti-Alloy shaft[J].Journal Magnetics Society of Japan,1998,22(6):1074-1079.
[10]Garshelis I J.A torque transducer utilizing a circularly polarized ring[J].IEEE Transactions on Magnetics,1992,28(5):2202-2204.
[11]Kleinke D K,Uras H M.A noncontacting magnetostrictive strain sensor[J].Review of Scientific Instruments,1993,64(8):2361-2367.
[12]Kleinke D K,Uras H M.A magnetostrictive force sensor[J].Review of Scientific Instruments,1994,65(5):1699-1710.
[13]Baudendistel T A,Turner M L.A novel inverse-magnetostrictive force sensor[J].IEEE Sensors Journal,2007,7(2):245-250.
[14]Toriia Y,Wakiwakaa H,Kiyomiyab T,et al.Tb-Fe-Co giant magnetostrictive thin film and its application to force sensor[J].Journal of Magnetism and Magnetic Materials,2005,290-291(2):861-864.
[15]江田弘,佐佐木康彥,濱田隆治.超磁わい超精密位置決め裝置とそれを搭載した超精密工作機械の開発[C]∥日本機械學會論文集:C編.日本:一般社団法人日本機械學會,1994,60(572):1446-1452.Eda H,Sasaki Y,Hamada R.Development of a giant magnetostriction-type ultraprecision positioning device and ultraprecision machine tool equipped with it[C]∥Transactions of the Japan Society of Mechanical Engineers C.Japan:The Japan Society of Mechanical Engineers,1994,60(572):1446-1452.(in Japanese)
[16]Davino D,Giustiniani A,Visone C,et al.Experimental analysis of vibrations damping due to magnetostrictive based energy harvesting[J].Journal of Applied Physics,2011,109(7):509.
[17]Olabi A G,Grunwald A.Design and application of magnetostrictive materials[J].Materials & Design,2008,29(2):469-483.
[18]Moon S J,Lim C W,Kim B H,et al.Structural vibration control using linear magnetostrictive actuators[J].Journal of Sound and Vibration,2007,22(4-5):875-891.
[19]Toshiyuki U,Eric S,Marilyn W F,et al.Micro-magnetostrictive vibrator using iron-gallium alloy[J].Sensors and Actuators A:Physical,2008,148:280-284.
[20]Pratt J R,Flatau A B.Development and analysis of self-sensing magnetostrictive actuator design[C]∥Preceedings of the 1993SPIE Smart Materials and Structures Conference.Bellingham:SPIE-INT SOC Optical Engineering,1993:952-961.
[21]Fenn R C,Gerver M J.Passive damping and velocity sensing using magnetostrictive transduction[C]∥Proceedings of the SPIE Smart Materials and Structures Conference.Bellingham:SPIE-INT SOC Optical Engineering,1994:216-227.
[22]Kuhnen K,Schommer M,Janocha H.Integral feedback control of a self-sensing magnetostrictive actuator[J].Smart Materials and Structures,2007,16:1098-1108.
[23]Jia Zhenyuan,Liu Huifang,Wang Fuji,et al.Research on a novel force sensor based on giant magnetostrictive material and its model[J].Journal of Alloys and Compounds,2011,509(5):1760-1767.
[24]Jia Zhenyuan,Liu Huifang,Wang Fuji.Researches on the computer digital control system of giant magnetostrictive actuator[J].Mechatronics,2009,19(7):1191-1196.
[25]Jia Zhenyuan,Liu Huifang,Wang Fuji,et al.A novel magnetostrictive static force sensor based on the giant magnetostrictive material[J].Measurement,2011,44(1):88-95.
[26]Jia Zhenyuan,Liu Huifang,Wang Fuji,et al.Output characteristics of giant magnetostrictive force sensor under the effect of various factors[J].International Journal of Mechatronics and Automation,2011,1(4):161-171.
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學物理·高中(2016年12期)2017-04-22 11:53:03
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30