不同種類計程儀在高速船上運用效果分析
2014-01-04 02:31:28張寧
船舶 2014年6期
張 寧
(海軍駐上海地區(qū)艦艇設計研究軍事代表室 上海200011)
引 言
本文以出口國外的13米級高速艇為研究對象進行分析(以下簡稱M13高速艇)。此高速艇艇長13 m,理論最高航速可達80 kn,航行時的特點是航速高、吃水淺。M13高速艇在高速行駛時,其艇底板的流場特性與低速行駛時有很大不同,這些不同點會直接影響接觸式計程儀(壓差計程儀、電磁計程儀、聲多普勒計程儀)的測速精度。在海況較高的情況下,由于風浪和潮涌的影響,艇體會受到波浪較大的沖擊力,這也會嚴重影響接觸式計程儀的測速精度。
無線電多普勒計程儀利用無線電測速原理,從安裝在甲板上的天線向水面發(fā)射無線電波進行測速,這種無接觸式測量技術可以從根本上解決高速艇高航速時帶來的種種問題,同時也可解決高海況時波浪沖擊力問題。
本文從原理和數(shù)值仿真兩個層面對高速艇安裝接觸式計程儀進行分析,對會引起測速誤差的各種因素進行總結(jié),從而得出高速艇的測速應使用無線電多普勒計程儀的結(jié)論。由于測深儀的工作原理與聲多普勒計程儀類似,本文的分析結(jié)果也同樣適用。
1 四種計程儀原理概述
1.1 壓差計程儀測速原理
壓差計程儀是利用皮托管原理[1],通過水壓信息接收系統(tǒng)采集運動著的艦船產(chǎn)生的動壓與靜壓之差,并經(jīng)計算機運算轉(zhuǎn)換成艦船的航速并輸出。
壓差計程儀的測速原理是基于伯努力方程,其方程表示如下:

式中:Pd為流體的動壓,也就是壓力差;K為流體動力系數(shù),它與船體外形、安裝方式、動壓引入以及安裝位置有關,通過它來修訂速度;Rg為流體的比重;V為船的運動速度;G為重力加速度。
由式(1)可得速度 :

假設K=1時,Rg、G為常數(shù),船速由Pd唯一確定,所以測得Pd,就可測得V[2]。
1.2 電磁計程儀測速原理
電磁計程儀的測速原理是基于法拉第電磁感應定律,當導體回路所包圍面積的磁通量發(fā)生變化時,回路中就會產(chǎn)生感應電動勢和感應電流。感應電動勢的大小與回路相交磁通隨時間的變化率成正比,其方向由楞次定律決定。回路中感應電動勢的大小和方向可表示為:

楞次定律告訴我們,當導體在磁場中切割磁力線時,導體兩端會產(chǎn)生感應電動勢。海水(或淡水)本身是一種連續(xù)導電介質(zhì),電磁計程儀就是利用水切割磁力線產(chǎn)生感應電動勢來實現(xiàn)測速的一種方式。式(3)可變?yōu)椋?/p>

式(4)說明,電磁計程儀在測速時由于磁感應強度B不變,傳感器兩電極點間的距離D固定,所以當船運動時,水切割磁力線,兩電極點間產(chǎn)生的感應電勢只與 有關,所以,只要測得導體兩端的感應電動勢E,便可獲得航速。[2]
1.3 聲多普勒計程儀測速原理
圖1描述的是最簡單的多普勒計程儀——單向單波束。如圖1所示,在船底安裝了計程儀發(fā)射換能器和接收換能器。發(fā)射換能器向海底發(fā)射頻率為f0超聲波束,波束發(fā)射角為α。 船速沿水平方向,記為vx,則根據(jù)多普勒效應原理,在P點處接收到的頻率為而在o′點接收到的頻率為
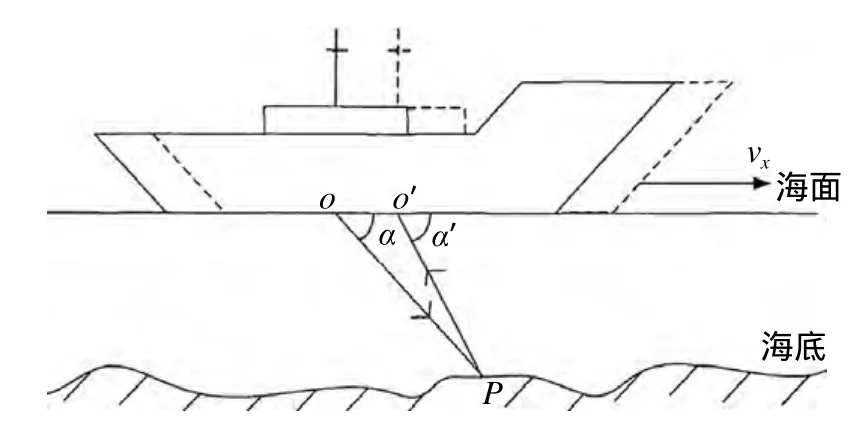
圖1 單向單波速計程儀原理
由于水中聲速c遠大于船速Vx,可以近似為入射角α≈α′,則化簡得

將式(5)式按泰勒級數(shù)展開,并舍去高次項,可得
可以看出,f0、c與α均為已知數(shù),只需測量得到fd,即可得到船速vx[2]。
1.4 無線電多普勒計程儀測速原理
無線電多普勒計程儀的測速原理同樣是基于多普勒效應。當電磁波束發(fā)射點與回波接收點存在相對位移時,測量收到的回波信號頻率相對發(fā)射頻率會發(fā)生變化,該頻率的變化稱為多普勒頻移,它取決于電磁波發(fā)射點與回波接收點相對位移的速度。原理公式可見式(5),只需將聲速c改為光速。
2 艏部流場對計程儀安裝的影響
2.1 艇艏流場的理論分析
壓差式、電磁式和聲多普勒計程儀同屬于接觸式計程儀。其工作時,傳感頭必須與水接觸,所以傳感頭的安裝位置必須位于高速艇的底部。接觸式計程儀的安裝位置為了減小艇底邊界層的影響,一般位于距船艏1/3艇長處,因為越遠離艇艏邊界層的厚度會越大[3]。下面針對M13高速艇,就艇艏位置分析接觸式計程儀的測速效果。
M13高速艇在高速滑行狀態(tài)時,其艇重主要依靠艇底水動力產(chǎn)生的升力來支持,這時高速艇吃水與浸濕長度都顯著減小。且浸濕面積的減小與速度的平方成反比[4]。
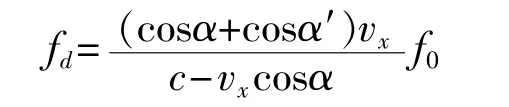
由于艇體吃水減少和縱傾角的存在(大約為5°),高速航行時,艇艏會有部分位于水面以上。觀察流經(jīng)艇艏部的水流可以發(fā)現(xiàn):水流在靠近艇艏的地方分為兩股,主要部分向尾部下折,其余部分向上折轉(zhuǎn),形成薄層水流噴射出來。
圖2 艇首流場的速度壓力分布
圖2顯示的是艇艏縱向水流速度和壓力分布情況,其中o點為水流駐點,這一點的流體壓力最大,即Po=Pmax,流速為最小幾乎為0。水流在o點分為兩股,主要部分向尾部下折,其余部分向上折轉(zhuǎn),形成薄層水流噴射出來。這種現(xiàn)象產(chǎn)生的原因是由于o點的壓力最大,水流從壓力較大處流向壓力較低處。薄層噴射區(qū)的水流,緊靠船體表面的壓力隨著流體運動而不斷減小,最終會低于標準大氣壓,在薄層離開船體表面處,壓力又會等于標準大氣壓,所以會出現(xiàn)BC段的凹陷情況。根據(jù)定常不可壓縮流動的伯努利方程[1]可知,在流體的勢能沒有發(fā)生變化時,流速和壓力滿足式(6)。

由式(6)可知,隨著流體壓力的降低,流速會隨之增大。從圖2可以看出,壓力的變化具有非線性的特點,所以,速度的變化也同樣具有非線性特點。隨著航速的變化,艇艏某固定點的速度壓力變化也會非線性的變化,這對接觸式計程儀的測速精度會有很大影響,因為從其原理可知,接觸式計程儀只能對線性偏差進行修正,而對非線性偏差則無法修正。
2.2 艇艏流場的Fluent仿真及分析
為了更準確的對上述現(xiàn)象進行分析,使用Fluent軟件對M13高速艇進行建模、仿真,并對仿真結(jié)果進行分析,從而獲得M13高速艇艏部安裝接觸式計程儀會引起的誤差量[5]。
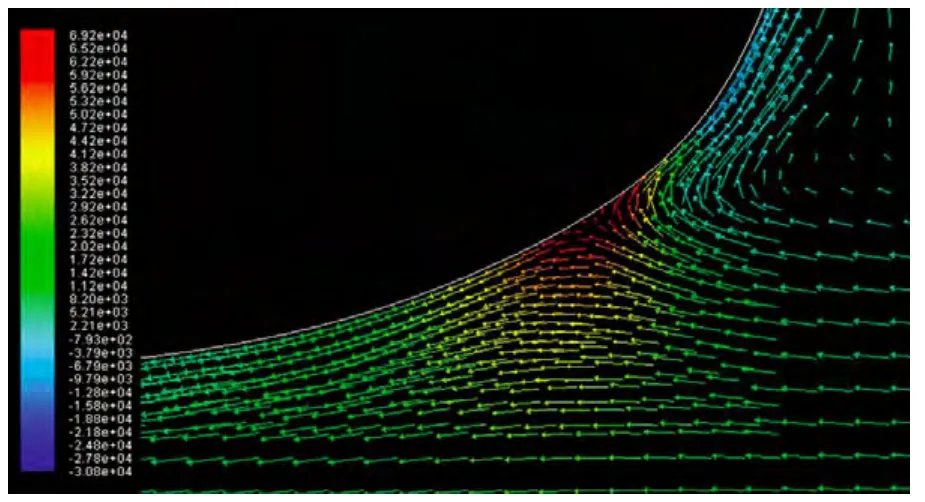
圖3 液相速度矢量圖
根據(jù)理論分析,水流在駐點處分為兩股,其中一股回折向上流動并噴射出來,這種現(xiàn)象從圖3可以明顯看出。箭頭的長度代表水流速度的大小,箭頭的方向代表水流的方向。圖形的顏色表示流體的壓力值,壓力較大處,顏色偏紅,壓力較小處,顏色偏藍。從圖3可以看出駐點o處的壓力最大。
實際仿真計算得出的艇艏縱向壓力分布曲線和速度分布曲線基本與圖2類似。隨著水流速度的增加,水對M13艇產(chǎn)生的動升力和力矩也會增加,此時,M13艇的縱傾角會增大,駐點會相應的向后移動。因此,就M13艇上某一定點來說,其來流速度—定點壓力曲線,來流速度—定點速度曲線是呈非線性關系的。
從以上計算可以看出,M13高速艇在高速運動時,根據(jù)艏部的流場特性,接觸式計程儀傳感器若安裝在艇艏位置,會引起測速誤差的因素有:
(1)傳感器會處于駐點位置或水流回折區(qū)域
從圖3可以看出水流在駐點處發(fā)生回折流動現(xiàn)象。隨著M13艇速的增高,艇體吃水深度會隨之減少,導致駐點位置隨之向艇艉方向移動。若接觸式計程儀傳感器若安裝在艇艏位置,會處于駐點處或水流回折區(qū)域,導致無法測速。
(2)速度和壓力分布無法線性修正
即使接觸式計程儀傳感器安裝在M13艇最高航速相應的駐點之后,通過上述分析可以發(fā)現(xiàn),隨著航速的增加,其壓力、速度變化與航速之間呈非線性關系。從壓差式計程儀、電磁式計程儀的測速原理中可見,其修正系數(shù)K僅能對線性偏差進行修正,從而導致在某一航速下調(diào)試好的K值,在另一航速下會產(chǎn)生較大的測速誤差。
3 空化對計程儀安裝的影響
M13高速艇的行駛速度很高,理論最高航速達80 kn,在如此高航速下,流體流經(jīng)艇底板時會產(chǎn)生一些新的問題。在高速流體中,艇底板任何不平整的地方都有可能產(chǎn)生空化現(xiàn)象,這是研究高速流體必須面對的問題,下文將就空化現(xiàn)象對接觸式計程儀的測速影響進行詳細分析。
3.1 斷階產(chǎn)生空化的理論分析
M13高速艇為了提高滑行效率,沿艇底的縱向有斷階。由于斷階的存在,水流流至斷階處,由于船底板的突然階梯彎折而使邊界層分離,當艇速較高時會在斷階處形成漩渦。如圖4所示。
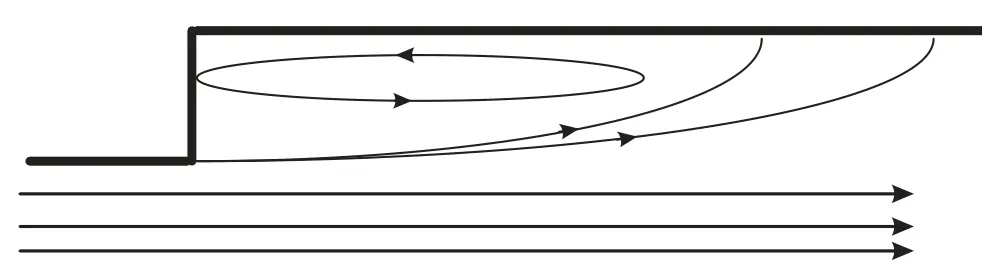
圖4 M13高速艇斷階示意圖
漩渦中心的壓力非常低,并且隨著航速的增加,漩渦中心的壓力會隨之降低,當壓力降低至水的汽化壓力時,水中的空氣微核便開始迅速膨脹,形成氣泡,便產(chǎn)生了空化現(xiàn)象。空泡在低壓區(qū)形成,隨水流進入高壓區(qū)以后,在高壓區(qū)潰滅。空泡在艇底高壓區(qū)潰滅時會產(chǎn)生高速微射流射向艇底板,對艇底板及接觸式計程儀的傳感頭影響很大。
3.2 斷階空化的Fluent仿真及分析
為了更準確地分析M13高速艇在高速行駛時,其斷階處產(chǎn)生的空泡對接觸式計程儀的影響程度,現(xiàn)用Fluent軟件對M13高速艇底板斷階處的流場進行建模并仿真,對仿真得到的數(shù)據(jù)進行處理后便得到所需的圖形和曲線[5]。
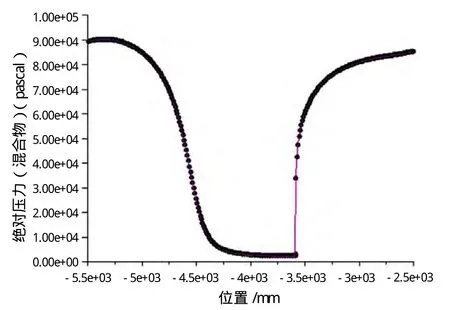
圖5 斷階處流場的壓力曲線圖
圖5為斷階處流場的壓力曲線圖,從中可看出流場壓力在斷階處最低,并且沿著流體流動方向逐漸升高。低壓區(qū)的形成是由于艇底斷階的存在,使艇底板出現(xiàn)外突的棱角,流動空間在棱角后突然擴大,導致邊界層分離,從而產(chǎn)生漩渦和低壓區(qū)。當?shù)蛪簠^(qū)的壓力小于水的汽化壓力時,空泡便會產(chǎn)生。
表1為不同溫度對應于不同的汽化壓力。表2為M13高速艇的航速為20 m/s時,斷階前后的壓力分布表。斷階處的位置為0 mm,沿流體流動方向為正方向。表2中最低壓力點為2 320.9 Pa,低于仿真中設置的水的汽化壓力2 367.8 Pa,所以會產(chǎn)生空化現(xiàn)象。從表1可知:M13高速艇所處水域溫度越高,水的汽化壓力會越大,斷階處便更容易發(fā)生空化現(xiàn)象。

表1 水的汽化壓力表
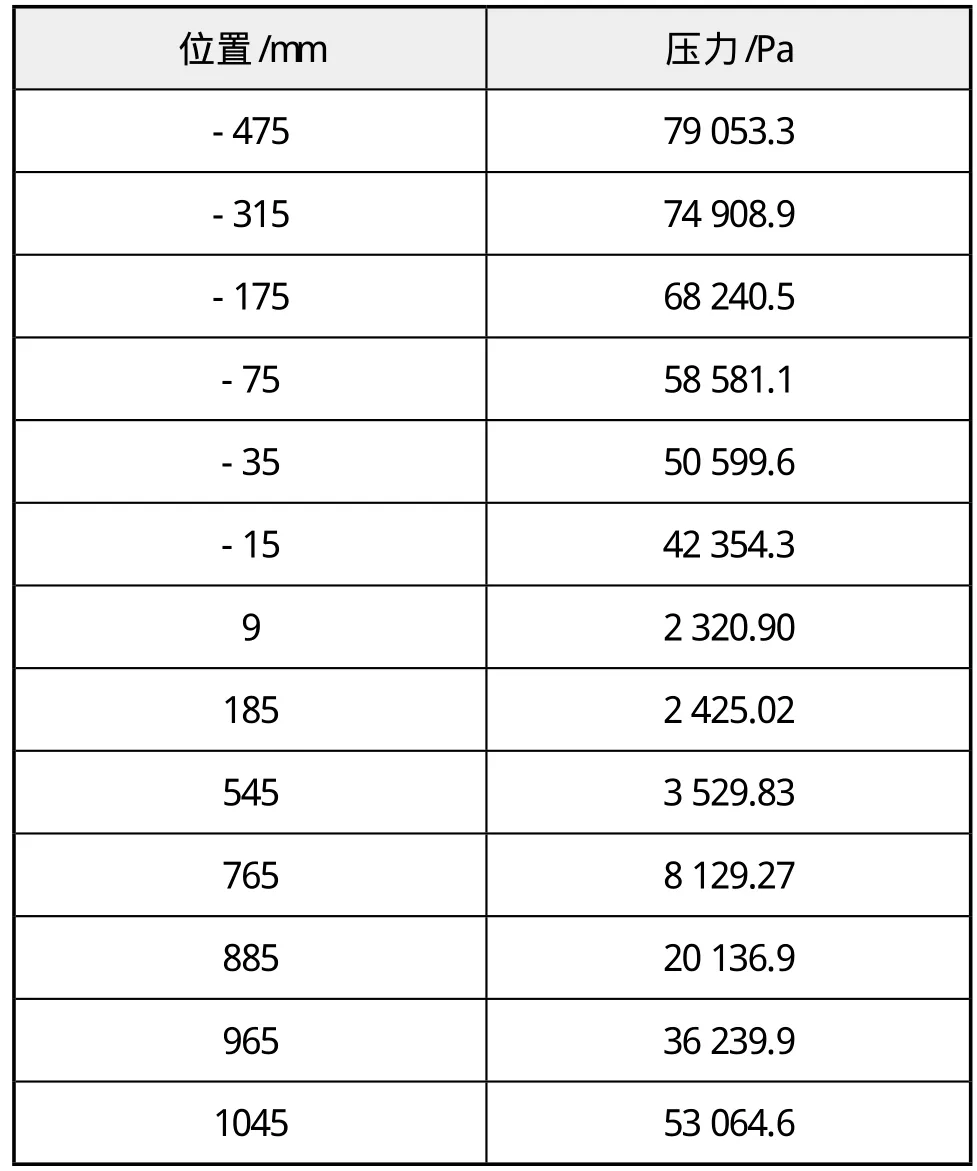
表2 斷階前后的的壓力分布表
從以上仿真分析中可以看出,M13高速艇以20 m/s航行時,斷階處會因為流速較高而產(chǎn)生低壓空穴,空穴是比較嚴重的一種空化現(xiàn)象。空化所產(chǎn)生的空泡隨水流流向下游的高壓區(qū)并開始潰滅,潰滅時會產(chǎn)生高速微射流和沖擊波,使周圍流場壓力高達數(shù)百大氣壓。這對接觸式計程儀傳感頭會造成很大的破壞。
電磁式計程儀需要水流切割磁力線產(chǎn)生感應電流。由于空泡中的空氣無法切割磁力線,從而影響電磁式計程儀的正常使用,同時,空泡潰滅所產(chǎn)生的高速微射流和高壓沖擊波,使傳感器周圍的流常異常紊亂,致使電磁式傳感器無法正常使用。
壓差式計程儀要求動壓采集端口伸出船底一定距離,開口朝向艇艏,靜壓采集端口與艇底板齊平。艇在高速行駛時,動壓采集端口伸出艇底一定距離會增大艇的航行阻力,同時靜壓采集端口由于與艇底板齊平,受高壓沖擊波產(chǎn)生的數(shù)百大氣壓的影響,致使壓差式計程儀無法正常使用。
聲多普勒計程儀所發(fā)射的超聲波的傳播介質(zhì)為水,當傳感器安裝位置處有大量氣泡存在時,會導致傳感器接收不到回波信號,使計程儀無法正常工作,并且高速微射流和高壓沖擊波對傳感頭也會造成很大破壞。
4 波浪砰擊對計程儀安裝的影響
M13高速艇在高速滑行時,艇底原來就承受著相當大的水動壓力,再以高速沖向波浪必然會引起更大的沖擊。大型船舶的砰擊現(xiàn)象一般僅限于船艏,而高速快艇中部也成了問題,尤其是艇體較小會跳出波面,連船艉也可能受到很大的沖擊。
高速快艇底部所受到的沖擊力,與波高和艇速有關。圖6表示某高速艇在30 kn航速、迎浪情況下,船底所受沖擊水壓力隨波高變化的曲線。圖7表示某高速艇艇底沖擊水壓力隨航速的變化曲線。
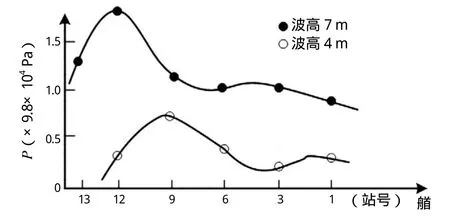
圖6 船底沖擊力沿船長的分布(波高的影響)
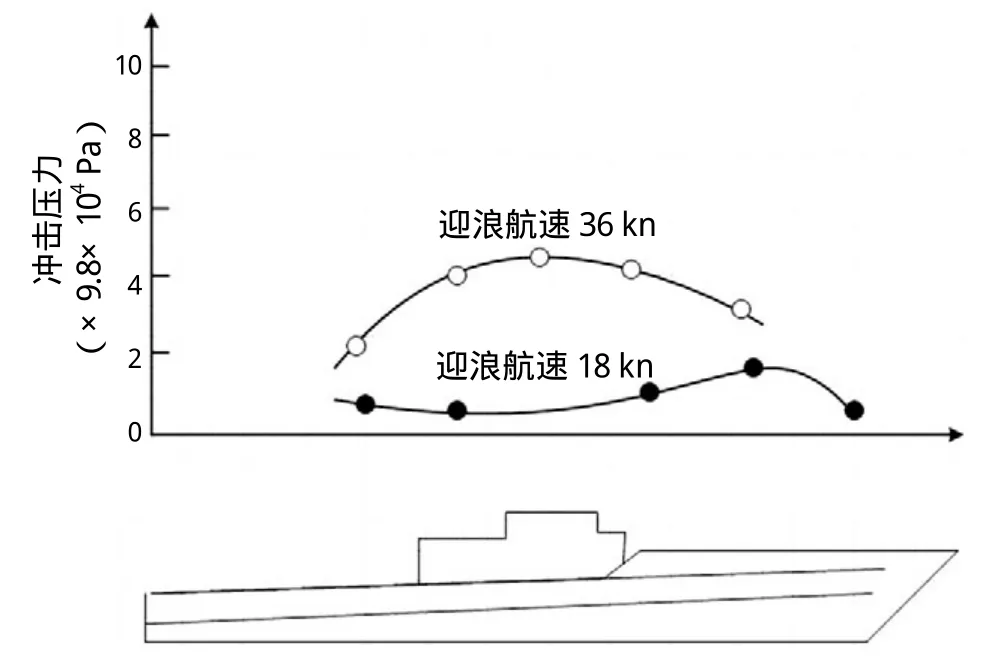
圖7 船底沖擊力沿船長的分布(船速的影響)
從圖6和圖7可以看出,艇速不變、在不同海況時,艇底壓力分布不同且變化規(guī)律為非線性時,變化幅值較大;海況不變、在不同艇速時,艇底壓力分布也不同且變化規(guī)律為非線性,變化幅值較大。壓差式計程儀即使在測速場將速度調(diào)試好后,行駛在不同海況不同航速時,也會有很大的測速偏差。如圖6所示,艇速為30 kn、波高4 m時,12站號的壓力為0.04 MPa,而波高7m時,12站號的壓力為0.2 MPa,整整相差5倍。
5 無線電多普勒計程儀適裝性分析
通過以上分析可知,M13高速艇在高速行駛時,其艇底板的流場特性與低速行駛時有很大差別,主要表現(xiàn)在吃水淺、有艉傾和空化等現(xiàn)象,從而導致艇艏的流速和壓力變化與艇速成非線性關系。接觸式計程儀理論上僅能對線性偏差進行修正,所以接觸式計程儀無法在艇艏安裝使用,若水流駐點(見圖2)移動至接觸式計程儀安裝點甚至之后,則會直接導致計程儀無法測速。M13高速艇高速行駛時,艇底斷階處會產(chǎn)生空化現(xiàn)象,空泡隨水向下流,這對M13艇減小行駛阻力是有利的,但這導致安裝在艇底中部或尾部的接觸式計程儀測速偏差過大。安裝于艇底的接觸式計程儀,其傳感器安裝處會有凸凹處,這些凸凹處在M13艇高速行駛時也會產(chǎn)生空化現(xiàn)象,且隨著艇速增高,空化現(xiàn)象會不斷加劇,當發(fā)展至全空泡階段時,會導致接觸式計程儀無法測速。
無線電多普勒計程儀為非接觸式計程儀,其傳感頭安裝在艇甲板上,這從根本上解決了接觸式計程儀所遭遇的問題。隨著技術的發(fā)展,高速艇的艇速會不斷提高,艇底的空化現(xiàn)象會更為嚴重。現(xiàn)在有些研究機構為了減小高速艇行駛時的阻力,正在研究微氣泡減阻技術,即向艇底板通入大量的氣泡以減小阻力,若此項技術日后應用于高速艇,也會直接影響接觸式計程儀的使用。
[1] 夏國澤.船舶流體力學[M].武漢:華中科技大學出版社,2003:45-50.
[2] 陳吉安.電航儀器[M].大連:大連海事大學出版社,1997:245-260.
[3] 中國船舶工業(yè)總公司.船舶設計實用手冊:電氣分冊[M].北京:國防工業(yè)出版社,1997:597-602.
[4] 董祖舜.快艇動力學[M].武漢:華中理工大學出版社,1991:43-45.
[5] 常欣.Fluent船舶流體力學仿真計算工程應用基礎[M].哈爾濱工程大學出版社,2011:14-75.
