無線局域網絡定位研究進展
2014-01-10 01:47:30田世偉李廣俠
導航定位學報 2014年3期
杜 鋒,田世偉,李廣俠
(解放軍理工大學 通信工程學院,南京 210007)
1 引言
隨著無線網絡技術和普適計算的快速發展,基于位置識別的服務(location based services,LBS)正越來越多的受到工業界和學術界的關注。其中,定位技術是實現LBS的關鍵,它被運用于旅游導航、目標識別和個性化信息傳遞等許多方面[1-2]。
全球定位系統(global positioning system,GPS)是當今最流行的定位技術,它通過GPS衛星信號接收機捕獲、測量來自至少4顆在軌衛星的廣播信號到達延遲時間來估算終端位置,可以提供覆蓋全球范圍以及高精度、全天候的連續定位能力。但是在室內和樓宇林立的復雜城市環境中,微弱的GPS無線電信號無法穿透建筑物,因此在這種環境下GPS定位效果并不理想[3-4]。而當今日益普及的無線網絡技術被認為是解決這一問題的關鍵[3]。
IEEE 802.11協議是無線局域網絡(wireless local area networks,WLAN)領域的國際通用協議。該協議于1997年被首次提出,兩年后提出的802.11b主要對原協議在物理層上進行改動,加入了高速數字傳輸的特性和連接的穩定性,后來又提出的802.11g是802.11b在同一頻段上的擴展,它們是當今使用最為廣泛的WLAN通信協議。802.11b協議[5]規定的工作頻段為2.4GHz,最高傳輸速率為11Mbit/s,支持的范圍是在室外為300m,在辦公環境中最長為100m。同時,在802.11b協議信號傳輸幀結構中,包含同步頭(synchronization header,SHR)、物 理 層 報 頭(physical layer header,PHR)和物理層服務數據單元(PHY service data unit,PSDU)。其中同步頭由兩部分組成——測距前導碼(synchronization,SYNC)和幀分隔符(synchronization frame delimiter,SFD)。SYNC借助擾碼可以判定接收信號是否為WLAN信號,SFD通過發送一長串同步碼來確定接受信息的起始時刻,在同步與測距中,借助于這兩點信息可以實現定位[6]。
室內定位技術的研究方法主要包括基于超聲波定位技術、基于紅外定位技術、基于超寬帶定位技術、射頻識別定位技術(WLAN、ZigBee)等[7]。
考慮將WLAN技術運用于定位主要有三個方面的原因[8]:首先,無需專門的硬件,因為當今幾乎所有的手機都能支持802.11b/g網絡協議架構;第二,由于WLAN覆蓋范圍不斷擴大,在大多數工作和生活環境下人們都能很方便地通過接入點(access point,AP)接入802.11b/g網絡;第三,在大多數情況下,WLAN都能為LBS提供較為準確的室內定位。
本文首先介紹了WLAN定位系統的結構。其次借助于測距原理對三種WLAN定位技術進行綜述。然后根據WLAN定位技術的難點,結合最新研究成果描述WLAN技術在定位方面的發展歷程和研究方向。最后對全文進行了歸納與總結。
2 WLAN定位技術
2.1 WLAN定位技術的原理
WLAN定位系統主要分為三個模塊,如圖1所示。數據采集模塊是指用戶終端網卡主動掃描或被動監聽其接收范圍內各WLAN信道上的AP信號,根據不同定位算法使用度量指標不同,可以提取AP信號的傳輸時間、到達角度和信號強度等信息。這些信息傳遞給定位模塊,根據不同算法選用不同信息進行定位計算。最后,顯示模塊將計算結果顯示出來,表達方式分為位置坐標和符號表達。
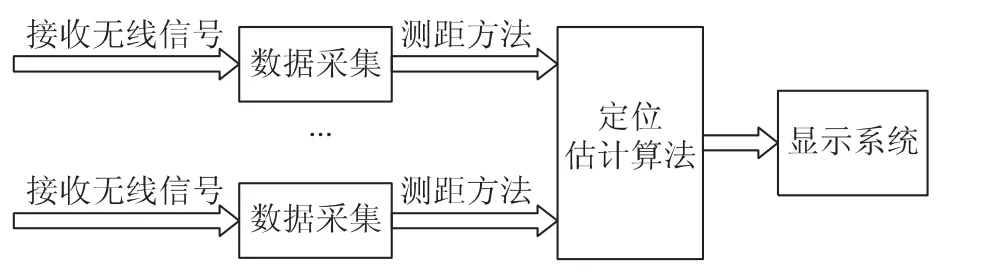
圖1 基于無線局域網絡定位系統的功能模塊
2.2 定位方法
近似感知、幾何測量和場景分析是求解位置的三種基本方法。在WLAN中,近似感知方法為最強基站法,幾何測量方法包括到達時間(time of arrival,TOA)、到達時間差(time difference of arrival,TDOA)和到達角(arrival of angle,AOA),場景分析方法包括指紋識別法和信號傳播模型方法。
2.2.1 近似感知
最強基站法是將無線設備接入點AP的位置近似為用戶所在位置,這是一種最簡單的定位方法。該方法受限于AP的覆蓋范圍,難以實現精確定位[1]。
2.2.2 幾何測量
在二維平面上,TOA方法通過選取三個參考點分別與待測目標的連線作為半徑,各自畫出一個圓,三圓的公共區域即為待測目標的可能位置(如圖2所示),在三維空間中則需要4個參考點作球面相交來定位。
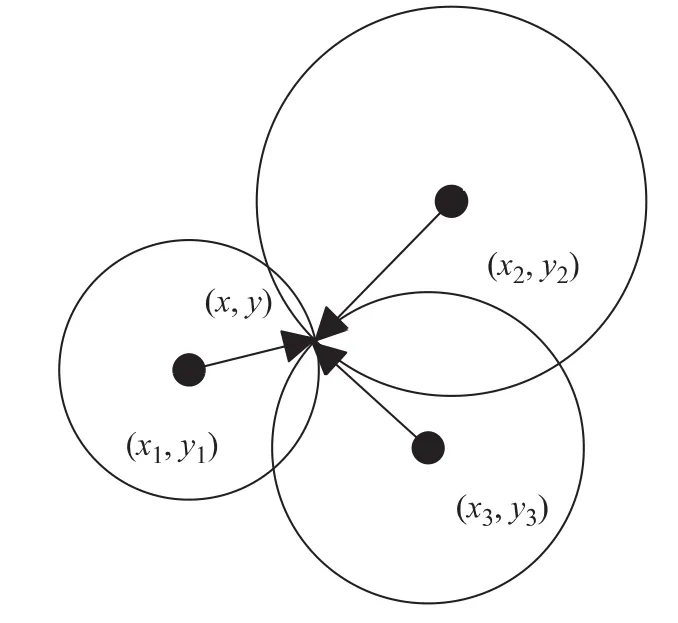
圖2 TOA的測距定位模型
WLAN通過TOA,即測量無線信號到達用戶終端的時間來測量距離。該方法能實現精準定位,但由于無線信號在空氣中以光速傳播,1μs的時間誤差將導致300m的誤差,因此要求收發雙方有非常精準的時鐘同步,硬件要求高,所以目前在WLAN定位中運用不多。
TDOA是對TOA的一種改進方法。它通過測量信號到達兩個參考點的時間差,而不是絕對時間來估計待測點的位置,降低了時間同步要求。但由于需要配置測量時間的硬件,這種方法主要應用在蜂窩網定位,在WLAN定位中應用不多[4]。
AOA在二維平面中是通過已知的兩個參考點位置分別到達待測目標的角度進行位置估計(如圖3),角度的測量主要借助于陣列天線實現。在室內環境下由于墻壁、桌子等遮擋,測量角度會存在誤差[4]。
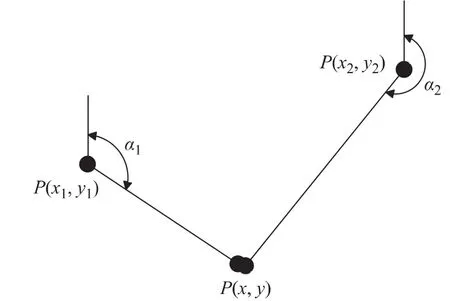
圖3 AOA的測距定位模型
2.2.3 場景分析
場景分析是利用在某一有利地點觀察到場景中的特征來推斷待測目標的位置,它分為靜態場景分析和差動場景分析兩種。在靜態場景分析中,待觀測的特征用來在一個數據庫中查詢,并將其映射為場景中的位置。相對的,差動場景分析通過追蹤連續的場景間的差異來估計位置[4]。
場景分析方法包括指紋識別法和信號傳播模型方法。指紋識別法由于算法靈活、定位相對準確,因而成為研究的熱門方向[9-10],這部分內容將在下一小節詳細介紹。
傳播模型方法是對無線信號在室內傳播衰減模型進行的研究,該方法可以減輕實際采樣的工作量。考慮墻壁影響的無線信號模型可以表示為
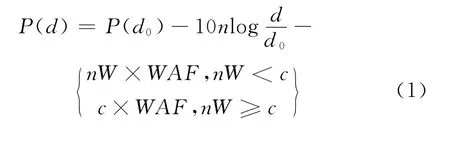
式(1 中,Pd0表示在參考距離d0處的信號強度,n表示信號強度隨距離增加的衰減速度,d表示信號發送方和接收方之間的距離,nW表示信號發送方和接收方之間的墻壁數,c表示衰減因子能夠分辨出的最大墻壁數,WAF指信號經過墻壁的衰減因子。
但是,發射機和接收機之間的障礙對信號傳輸的影響事先很難確定,文獻 [8]給出了一個經驗值OAF取代障礙影響的經驗模型,使得上面的模型可以簡化為

式(2)中,OAF取為15dBm。雖然這個模型不是很精確,但能滿足實際應用。
2.3 WLAN定位技術的難點
利用RSS的進行場景分析的重要前提是接收信號強度隨著AP與待測目標距離的增大而減小,由于室內環境復雜,會對RSS產生干擾,主要表現在以下三個方面:
(1)室內環境復雜。信號在傳播過程中會受到墻壁、天花板等的干擾,使得信號發生發射、折射、衍射等現象,使信號傳播產生多徑效應。
(2)IEEE 802.11b/g工作在2.4GHz條件下,信號傳播過程中容易受到其他使用相近頻段電器的干擾,比如微波爐。
(3)室內環境的復雜還表現在人和物的移動使得室內定位系統必須適應環境變換,不斷修正參數,保證定位的準確性。
2.4 基于指紋識別的WLAN定位技術
2.4.1 基本原理
指紋識別算法是一種基于聯合AP集的定位技術,觀測者通過在場景一些點測得來自各AP信號的強度。指紋識別分為兩個部分:離線勘測階段和在線定位階段。離線勘測階段主要是記錄場景選取的特定點的指紋信息,并建立RSS與場景中位置的對應關系數據庫;接下來,基于無線設備的待測目標在場景中通過AP接收到的信號強度,借助特定算法進行處理,然后在數據庫中尋找與計算結果最相近點對應的位置坐標,就可估計為該點位置坐標,從而完成在線定位。
2.4.2 離線勘測階段
離線勘測的目的是建立一個特定場景特征信息與移動設備之間的對應關系的數據庫。在場景中,任一點所測得AP信號的個數和強度都是唯一的,因此可以通過在場景中設定特定采樣點的方法測量RSS。在這個階段,需要完成的工作是手持移動設備在目標場景中進行逐個采樣點信息測量,測量點一般以網格形式進行分布,并且要求盡可能多的覆蓋整個場景。
在采集AP信號方面,并不是所有信號都對定位產生積極影響。根據不同的定位方法,提取合適的AP點信號值進行計算,可以提高定位的準確度,并減小計算冗余[2,11]。
由于存在信號衰落和其他干擾,被觀測點接收到的信號強度會隨時間而變化,因此必須對每個測量點進行多次采樣。而文獻 [1]將相鄰AP之間的距離縮小,即采用更小的單元網格同樣獲取更好的適應了環境的變換。此外,由于環境變換也會影響RSS的值,所以每次環境變換后都需要重新測量,使得該階段計算成本高,并且會產生定位時延[11],基于此,文獻 [12]提出了將RSS轉化為首要原件(principal components,PCs)并進行分析,增強了對RSS信號變化的穩定性。
2.4.3 在線定位階段
借助于離線勘測階段建立的數據庫,在線定位技術是通過特定算法對當前位置觀測到的RSS進行計算得出待測目標的估計位置。
根據離線勘測階段對獲取到的RSS的不同處理算法,定位方法可以分為確定性方法和概率性方法。
確定性方法是一種比較簡單的位置指紋定位技術。位置指紋數據庫針對每個采樣點保存相應位置處各可見AP的信號強度平均值。通過采用歐氏幾何距離或其他類型距離(如Manhattan距離)度量測量值與位置指紋之間的差異,并取差異值最小的指紋位置作為估計位置。可以描述成為

式(3)中,RSSi和FPi為實測數據或位置數據庫中第i個AP的信號強度。
由于確定性方法只計算了信號的均值,而忽視了方差、條件分布等內容,因此該方法未能充分利用RSS信號的信息。概率性方法是在實測信號強度的基礎上,借助于概率與統計的知識,計算得出待測目標在各點處的條件概率和后驗概率,最終得出條件概率最大的一個對應位置處后驗概率估計值XMAP。設采樣位置和實測AP信號強度對應符號分別表示為x,y,則概率性方法可用公式表示為

為計算py|x(y|x),現有兩種方法:核方法、直方圖方法[12]。
另外還有其他基于概率性方法的指紋識別定位技術為:貝葉斯算法、粒子濾波器法和馬爾可夫方法。文獻 [13]引入一種改進的貝葉斯回歸算法,能動態地估算和校準數據庫,從而省去了離線勘測階段;文獻 [10]將粒子濾波器與似然函數相結合組建適應性似然函數粒子濾波器(adaptive likelihood particle filter,ALPA)運用于惡劣環境,解決了隨時間推移傳播信號產生的非線性問題,并且達到了比傳統方法更好的準確度;文獻 [9]提出了一種基于馬爾可夫—蒙特卡洛方法實現可放在口袋里的智能手機定位方法,該方法的平均誤差在4m左右。
2.5 最新定位技術介紹
以上所介紹的是基于測距原理分類的定位方法,但隨著越來越多的學者在這一領域的不斷探索,基于其他方法和系統的定位研究不斷涌現。
2.5.1 定位算法
在定位算法方面,可以分為兩類,第一類是運用多種定位算法結合進行定位,這種方法將至少兩種算法進行結合,提高定位精度。第二類是創新定位算法,這類方法具有指導意義,是提出的新算法。
在多種定位算法結合方面,文獻 [2]將不同網絡定位信息智能地融合在一起,提出了分兩步實現定位的多無線電信號直接融合(direct multiradio fusion,DMRF)和本征無線電信號協同定位(cooperative eigen-radio positioning,CERP)算法[14],首先DMRP對多種無線網絡信息進行空間相關性分析,并去除冗余信息,然后借助于CERP對各信號特性進行有效組合以實現高精度定位,在現實環境下與單一的全球移動通信系統(global system for mobile communications,GSM)、數字視頻廣播(digital video broadcasting,DVB)、頻率調制(frequency modulation,FM)和 WLAN相比,定位誤差減小了44.19%~48.88%。文獻 [15]將室內定位和壓縮感知相結合,提高了定位精度,RSS信號借助于壓縮感知理論進行重構,通過粗定位和精定位兩個階段,實驗結果表明此定位方法比傳統指紋識別方法提高了定位精度,并降低了計算復雜度。文獻 [16]根據RSS模型設計出的定位算法無需離線勘測即可實現定位,這種算法無需知道包括AP布局在內的室內環境,移動設備記錄其接受范圍內AP接收信號強度,并發給定位服務器,所有報告的測量值受到無線傳播物理現象的約束,借助于EZ定位算法對這種約束進行模擬,并采用遺傳算法進行計算,實驗結果表明定位效果良好,并且誤差可控[16]。
在創新定位算法方面,文獻 [17]采用聲學背景光譜(acoustic background spectrum,ABS)指紋識別技術進行定位,這種方法的優點在于緊密、便于計算、對短暫聲音干擾具有很好的魯棒性,該方法同樣需要進行離線勘測,并與數據庫中的指紋進行匹配,從而尋找最相近的點進行定位,實驗中與只用WLAN進行定位結果相比,該方法定位精度更高。文獻 [18]指出室內定位過程中有很多干擾信號和誤差,提出基于遺傳(genetic algorithms,GA)的定位算法,該算法優勢在于無需太多節點信息。文獻 [2]采用基于判別適 應 性 神 經 網 絡(discriminant-adaptive neural network,DANN)不斷地將有效信息插入判別元件并遞歸更新網絡中數據權重的方法,準確地構建了RSS信號和位置之間的非線性關系。
可以看出,目前研究者的主要目標是改善復雜環境下的定位精度和誤差,如何能夠提高精度并且減少代價,兩者之間存在一個平衡問題。
2.5.2 定位系統
國外關于室內定位系統的研究比較成熟,其測量信號包括無線電信號、紅外信號、射頻信號和超寬帶信號等,根據不同的測距方法和指紋識別算法,研究者們制作出一些主要的定位系統如下:
Olivetti實驗室研發的Active Badage室內定位感知系統是最早的室內定位系統之一[19]。該系統采用紅外定位技術,對每個帶定位目標使用紅外發射機定期發送惟一識別碼。
麻省理工學院研制的Cricket室內超聲波無線射頻定位系統,是基于TOA測距的三邊定位系統[20]。Cricket系統通過無線射頻信號控制參考信號,計算聲波信號的傳播時間。由于射頻信號傳播速度遠大于聲波信號,因此該方法誤差較小。
微軟公司開發了RADAR室內跟蹤定位系統[21],它綜合經驗數據和衰減因子模型,采集大量數據進行指紋識別來確定目標位置,并提供定位服務和運用。這一系統后來由華盛頓大學陳俊華改進,他主要采用魯棒性的匹配模塊和向量模塊對使用者進行定位。
哈佛大學研制的MoteTrack是基于無線傳感器網絡的室內定位追蹤系統[22],系統僅僅通過使用無線電波就能夠確定一個移動點的位置,精度達到米級。這個系統是很多當前研究室內定位系統的原型。
2.6 不同定位算法優缺點比較
本文主要討論了不同定位算法和系統的研究情況,表1對這些算法與系統從精度,造價和復雜度方面進行了比較,并列出各自優缺點表1所示:
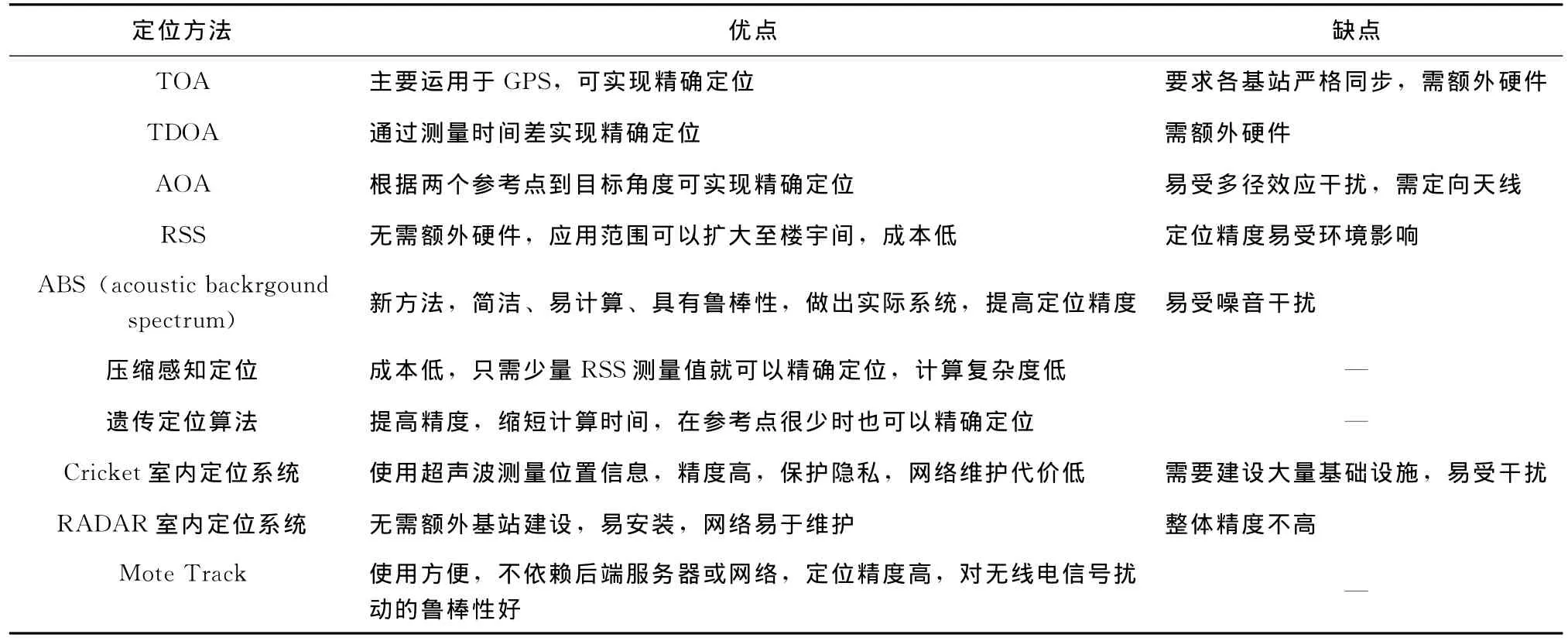
表1 不同定位算法優缺點比較
從以上對比可以看出,各定位算法和系統都有優缺點,雖然有些沒有給出缺點,但并不代表沒有缺點。在定位精度比較高的情況下,造價和計算復雜度也比較高,而在定位精度低的系統中,其造價和復雜度也比較低。因此,在定位系統研制過程中,需考慮精度、造價和復雜度之間的平衡。
3 總結與展望
本文介紹了基于WLAN的多種定位方法,由于近似感知方法定位準確度不高、基于幾何測量方法需增加額外硬件并且在室內環境下測量受阻,而基于指紋識別的場景分析方法無需額外硬件、定位算法靈活、準確度高,因此越來越受到研究者的青睞,其中基于概率性方法能充分利用RSS信號的信息,比確定性方法具有更好的定位效果。
在定位技術不斷改進的同時,未來的研究方向將會是朝著增強定位系統易用性、對環境變換的適應性方向發展,主要包括以下四個方面:首先,影響RSS的因素中各部分所占比例、接入點安放位置對定位的影響等問題還未進行深入的研究。第二,室內是一個人群密集的環境,如利用其他人的信息實現精準定位也是一個有趣的研究方向。第三,基于不同網絡信號特點,如何整合異構網絡,為用戶提供更加方便的服務也是一個值得思考的問題。第四,隨著云計算技術的發展,本文提出的方案是可以考慮將一些安裝固定AP的大型公共場所的離線勘測數據庫存儲在云端進行處理,從而減小計算成本和系統時延。
[1] CHENG Yu-chung,CHAWATHE Y,LAMARCA A,et al.Accuracy Characterization for Metropolitan-scale Wi-Fi Localization[EB/OL].[2014-02-18].http://research.microsoft.com/en-us/um/people/jckrumm/publications%202005/irs-tr-05-003.pdf.
[2] FANG Shi-hau,LIN Tsung-nan.Indoor Location System Based on Discriminant-adaptive Neural Network in IEEE 802.11 Environments[J].IEEE Transactions on Neural Networks,2008,19(11):1973-1978.
[3] LIU Ren-ping,HEDLEY M,YANG Xun.WLAN Location Service with TXOP[J].IEEE Transactions on Computers,2011,62(3):589-598.
[4] 張明華.基于 WLAN的室內定位技術研究[D].上海:上海交通大學,2009.
[5] IEEE Std 802.11b-1999,Wireless LANs[S].
[6] KING T,HAENSELMANN T,EFFELSBERG W:Deployment,Calibration,and Measurement Factors for Position Errors in 802.11-Based Indoor Positioning Systems[EB/OL].[2014-02-18].http://link.springer.com/chapter/10.1007%2F978-3-540-75160-1_2#page-1.
[7] ATHALYE A,SAVIC V,BOLIC M,et al.A Radio Frequency Identification System for Accurate Indoor Localization[EB/OL].[2014-02-18].http://www.diva-portal.org/smash/get/diva2:552325/FULLTEXT01.pdf.
[8] CHEN Yi-bo,LUO Rong.Design and Implementation of a WiFi-based Local Locating System[C]//Proceedings of 2007 IEEE International Conference on Portable Information Devices(PORTABLE07).Orlando,FL:IEEE,2007:1-5.
[9] LIU Yan,WANG Qiang,LIU Jun-bin,et al.MCMC-based Indoor Localization with a Smart Phone and Sparse WiFi Access Points[C]//Proceedings of 2012IEEE International Conference on Pervasive Computing and Communications Workshops(PERCOM Workshops).Lugano,Switzerland:IEEE,2012:247-252.
[10] PRIETO J,MAZUELAS S,BAHILLO A,et al.Adaptive Data Fusion for Wireless Localization in Harsh Environments[J].IEEE Transactions on Signal Processing,2012,60(4):1585-1596.
[11] BOONSRIWAI S,APAVATJRUT A.Indoor WiFi Localization on Mobile Devices[C]//Proceedings of 2013 10th International Conference on Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology(ECTI-CON).Krabi,Thailand:IEEE,2013:1-5.
[12] FANG Shi-hau,LIN Tsung-nan.Principal Component Localization in Indoor WLAN Environments[J].IEEE Transactions on Mobile Computing,2012,11(1):100-110.
[13] ABDELLATIF M,MTIBAA A,HARRAS K A.et al.An Energy Efficient Architecture for WiFi-based Indoor Localization on Mobile Phones[C]//Proceedings of 2013IEEE International Conference on Communications(ICC).Budapest:IEEE,2013:4425-4430.
[14] FANG Shi-hau,LIN Tsung-nan.Cooperative Multi-radio Localization in Heterogeneous Wireless Networks[J].IEEE Transactions on Wireless Communications,2010,9(5):1547-1551.
[15] FENG C,AU W S A,VALAEE S,et al.Compressive Sensing Based Positioning Using RSS of WLAN Access Points[C]//Proceedings of IEEE INFOCOM 2010.San Diego,CA:IEEE,2010:1-9.
[16] CHINTALAPUDI K,PADMANABHA I A,PADMANABHAN V N.Indoor Localization without the Pain[C]//Proceedings of the 16th Annual International Conference on Mobile Computing And Networking.New York:ACM,2010:173-184.
[17] TARZIA S P,DINDA P A,DICK R P,et al.Indoor Localization without Infrastructure Using the Acoustic Background Spectrum[EB/OL].[2014-02-18].http://stevetarzia.com/papers/ABS_mobisys.pdf.
[18] WU Tin-yu,LIAO I-ju,LEE Wei-tsong,et al.Enhancing Indoor Localization Accuracy of Sensor-based by Advance Genetic Algorithms[C]//Proceedings of the 6th International Wireless Communications and Mobile Computing Conference.New York:ACM,2010:1218-1222.
[19] WANT R,HOPPER A,FALCAO V,et al.The Active Badge Location System[J].ACM Transactions on Information Systems(TOIS),1992,10(1):91-102.
[20] PRIYANTHA N B,CHAKRABORTY A,BALAKRISHNAN H.The Cricket Location-support System[C]//Proceedings of the 6th Annual International Conference on Mobile Computing and Networking.New York:ACM,2000:32-43.
[21] BAHL P,PADMANABHAN V N.RADAR:An In-building RF-based User Location and Tracking System[EB/OL].[2014-02-18].http://www.tik.ee.ethz.ch/~beutel/projects/picopositioning/radar_microsoft_positioning.pdf.
[22] LORINCZ K,WELSH M.A Robust,Decentralized Approach to RF-based Location Tracking[EB/OL].[2014-02-18].http://www.eecs.harvard.edu/~konrad/projects/motetrack/moteTrack.pdf.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
