衛星導航系統監測站銣原子鐘頻率校準方法分析
2014-01-16 02:01:50李保東陶春燕張向征
導航定位學報 2014年1期
孔 維,李保東,陶春燕,張向征
(北京衛星導航中心,北京 100094)
1 引言
原子鐘作為精確時間基準,在科學、技術、軍事和商業中具有重要地位,早已應用到測控、導航、通信、監視、能源利用、電網調節、海上勘探等各個方面,尤其在衛星導航定位系統中,其性能直接影響用戶的導航定位精度。銣原子鐘(以下簡稱銣鐘)相對銫鐘和氫鐘,具有體積小、功耗低、便于制作等優勢,被廣泛應用于衛星導航定位系統地面監測站,為接收機數據采集與信號處理提供高精度時間基準和頻率基準,其工作性能對接收機的工作狀態以及定位性能有著重要影響。
按頻率準確度等級,銣鐘屬于需要定期校準的二級標準頻率源,其頻漂的固有特性隨時間變化會導致接收機時鐘頻率發生漂移,因此需要定期校準,以保障監測站提供的原始觀測偽距和載波相位數據的穩定性和準確性。目前應用于工程實踐的銣鐘頻率校準方法主要有傳統實驗室校準、小型校準測試儀校準和遠程在線校準三種形式,隨著測量技術和網絡通信技術的發展以及計量校準服務高精度、低成本的需求,校準技術會朝著更加合理、高效、自動化的趨勢發展。
2 銣鐘時頻特性分析
2.1 基本概念
衡量原子鐘時頻特性的主要指標包括:頻率準確度、頻率穩定度、頻率偏差和頻率漂移率等。頻率準確度是用來描述頻標的實際輸出頻率相對于其標稱頻率的偏差,頻率穩定度是用來描述原子頻標輸出頻率受噪聲影響而產生的隨機起伏情況,頻率偏差是指兩臺頻標輸出頻率的相對偏差,頻率漂移率是指頻標隨運行時間單調變化的速率。頻漂是原子頻標的固有特性,是無法改變的,即原子頻標頻率隨著時間推移變得越來越不準,最終導致監測站接收機的鐘差越來越大,因此必須定期校準原子頻標的輸出頻率值。
頻率準確度可定義為
(1)
式中,A為頻率準確度,f為被測頻標的實際頻率,f0為標稱頻率。
實際應用中以參考頻標的實際頻率作為標準來測量被測頻標的實際頻率,要求參考頻標的準確度比被測頻標的準確度至少高一個數量級以上。
2.2 頻率準確度對數據的影響
一個性能好的頻標,其輸出頻率應該又準又穩,輸出信號可以表示為
V(t)=[V0+ε(t)]sin[2πf0t+φ(t)]
(2)
式中,V0為標稱振幅,ε(t)為振幅的起伏,f0為標稱頻率或長期平均頻率,φ(t)為相位偏差。
信號的瞬時相位為
(3)
而瞬時角頻率是相位的時間導數,即
(4)
則瞬時頻率為
(5)
瞬時相對頻率偏差為
(6)
定義瞬時相對相位偏差為
(7)
將式(7)代入式(6),可得
(8)
由式(8)可知,瞬時相對相位偏差x(t)在物理上表現為時間偏差,也稱為相位時間,在監測站數據處理上體現為接收機鐘差,而瞬時相對頻率偏差y(t)也可以理解為時間偏差的變化率,即接收機鐘速。
根據實際觀測數據統計結果,93%的銣鐘在使用1 a以上,頻率準確度漂移至1×10-10量級以上,7%的銣鐘頻率準確度漂移至1×10-9量級以上,由此引發的系統影響是接收機鐘差越來越大,觀測數據質量不斷下降。依據接收機綜合觀測數據統計出銣鐘性能偏離指標最嚴重的監測站,可以及時進行銣鐘校準。
3 校準方法
3.1 傳統實驗室校準
實驗室校準是將計量設備定期送到具有資質的計量機構進行檢定,檢驗人員依據國家計量檢定系統和計量檢定規程進行計量器具檢定,銣鐘的檢定周期一般為1 a。按照檢定規程對銣鐘進行檢定,若各項檢定項目全部達到技術要求者,出具檢定證書;若檢定不合格,出具檢定結果通知書,并注明不合格的項目。
3.1.1 檢定條件
實驗室校準必須具備以下條件:
(1)環境條件
溫度在(15~18)℃范圍內、濕度小于80%、電壓為220(1±5%)V,50(1±5%)Hz,負載應固定不變;
(2)標準頻率
頻率漂移率和頻率準確度指標應優于被檢銣頻標的漂移率和頻率準確度一個數量級;頻率穩定度指標應優于被檢銣頻標的頻率穩定度的3倍,一般采用氫鐘或銫鐘作為可靠的標準頻率參考源。
(3)測量設備
頻率準確度測量誤差至少應比被檢銣頻標相應指標小一個數量;頻率穩定度測量誤差至少應小于被檢銣頻標頻率穩定度的三分之一;相位噪聲應比被檢銣頻標的相應指標至少低10 dB。
3.1.2 檢定內容
實驗室校準測量主要采用通用計數器、比相器、頻差倍增器、頻率合成器、倍頻器、鑒相器、頻譜儀等高精度儀器,利用頻差倍增、混頻等技術檢驗如下項目:
(1)開機特性:5×10-10~5×10-11;
(2)諧波及非諧波
諧波:≤-40 dBc;
非諧波:≤-80 dBc;
(3)頻率穩定度:
(5×10-11~5×10-12)/1 s;
(2×10-11~8×10-13)/10 s;
(5×10-12~2×10-13)/100 s;
(2×10-12~8×10-14)/1 000 s;
(2×10-12~2×10-14)/100 s;
(5×10-12~2×10-14)/1 d;
(4)相位噪聲:
(-70~-110)dBc/Hz(1 Hz);
(-90~-140)dBc/Hz(10 Hz);
(-110~-150)dBc/Hz(100 Hz);
(-125~-160)dBc/Hz(1 kHz);
(5)日頻率漂移率:1×10-11~1×10-13;
(6)頻率復現性:5×10-11~2×10-12;
(7)頻率準確度:
2×10-10~5×10-11≤1×10-12τ=1 d
(8)頻率調整范圍:±2×10-9
3.2 小型校準測試儀
小型校準測試儀能夠在不依賴實驗室條件、不攜帶大量檢測設備的情況下,對石英晶體、電子儀器內石英晶體振蕩器、銣原子頻率標準,或者其它頻率源、時間源進行檢測,與傳統的實驗室校準相比,具有操作簡單、觀察方便、儀器小型化的特點,同時縮短了頻率測量周期,降低了測量成本。
3.2.1 工作原理
小型校準測試儀內部一般采用帶有自適應能力的銣鐘自動馴服系統,可用全球定位系統(global positioning system,GPS)或其它導航信號馴服內部銣原子頻標的輸出精度,得到精確的頻率準確度和相位同步精度。一般馴服10 h后,頻率準確度可達到3×10-12范圍,此時校準測試儀已經具有較好的參考頻率源,可以采用自動和手動兩種方式來校準被測銣鐘,工作模式如圖1所示。
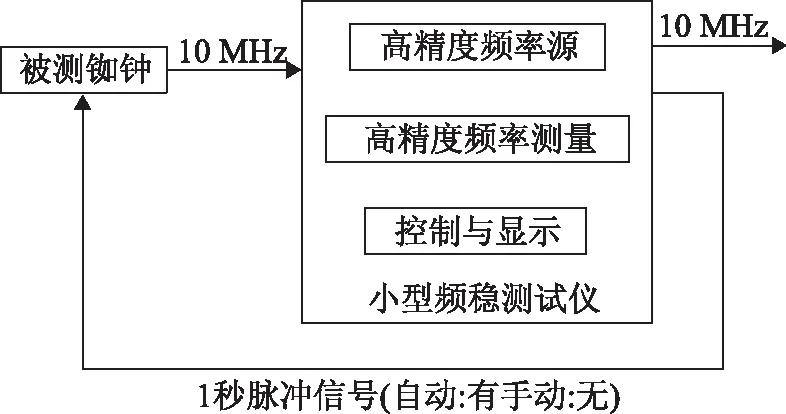
圖1 小型校準測試儀校準銣鐘工作模式
自動校準模式需要將校準測試儀輸出的1 s脈沖(pulse per second,PPS)信號作為參考標準去同步銣鐘,將銣鐘的10 MHz信號輸出作為被測信號接入小型校準測試儀實時讀取頻率值。采用頻率控制相位原理馴服銣鐘,即射頻和秒信號的相位相參。通過高精度的秒信號時差測量獲得銣鐘輸出頻率準確度的相位偏移量,用超精細的頻率微調(1×10-12單步)控制相位同步精度。
手動校準模式基于銣鐘內部有一個高穩晶振的窄帶鎖相環,銣鐘將準確度傳遞給晶振,晶振的輸出與壓控電壓相關,因此通過壓控電壓即可改變晶振信號的輸出。將銣鐘的10 MHz信號輸出作為被測信號接入小型校準測試儀實時讀取頻率值,通過調節銣鐘前面板旋鈕改變晶振壓控電壓,從而改變輸出10 MHz信號的頻率準確度。
3.2.2 技術特點
一臺高效實用的小型校準測試儀應具有集成度高、操作簡單、攜帶方便,將多種測試項目集于一體的特點,提供低相噪、高穩定度的10 MHz和1 PPS秒信號輸出,能夠在非實驗室條件下對10 MHz頻點的各項指標進行精密測量,可擴展多種同步信號,如GPS、格洛納斯衛星導航系統、伽利略衛星導航系統、北斗衛星導航系統,其主要技術特點體現在以下4個方面。
(1)高精度、高穩定度參考源
衛星導航信號接收機的定時脈沖具有很高的長期穩定性,利用精確1 PPS信號對銣原子頻率標準進行馴服,可以獲得頻率準確度<3×10-12的頻率精度;但是導航接收機輸出的定時信號存在秒抖動,短期穩定度較差,可采用多次平均、標準偏差概率估算以及數字濾波等方式來平滑隨機抖動。利用高穩石英晶體振蕩器獲得<1×10-12/s的短期穩定度,從而保證校準測試儀的短期和長期高精度、高穩定度。
(2)高精度頻率測量
高精度頻率測量是將外部輸入的被測頻率信號與參考頻率源產生的標準頻率信號進行比較測量,采用雙時差測量技術和內插脈沖測量技術,解決信號抖動的確定度以及時延對測量絕對精度影響等問題;采用頻率倍頻技術和混頻技術使被測信號的頻率誤差倍增,提高測量精度。
(3)高集成度
小型校準測試儀用衛星導航定時信號來馴服銣原子頻標、將其與高穩石英晶體振蕩器、頻率測量模塊和測試軟件集成在機箱內,大量使用大規模集成電路和分層結構設計,組成一種方便、實用、便攜式的頻率綜合測量系統。
(4)快速通信顯示
數據通信完成外部數據交換,頻率測量結果通過數據通信模塊輸入到數據處理模塊進行數據處理,得到對被測頻率信號的計算數據,計算數據應包括被測頻率的開機特性、短期穩定度、老化率(漂移率)、準確度、復現性等指標,然后將計算數據進行顯示。
3.3 遠程在線校準
遠程在線校準就是主控站對監測站銣鐘實施遠距離校準,被檢銣鐘無需送到計量技術機構去校準,盡量減少工作人員的上站操作,利用測定的被測銣鐘與測量標準的差值通過指令形式控制銣鐘校準的過程。對于自然環境復雜的偏遠監測站,工作人員難以定期上站進行設備校準的情況,遠程在線校準方式就顯示出極大地優勢。
3.3.1 工作原理
遠程在線校準系統充分利用了地面網絡傳輸數據與遠程控制的功能,在各監測站配置定時接收機和高精度時差測量設備,實時完成定時接收機輸出的標準1 PPS秒信號與被測銣鐘1 PPS秒信號的時差測量,利用時差在時間間隔內的變化量擬合出被測銣鐘的頻率準確度,全部數據處理均由監測站完成。主控站人員可以遠程控制監測站是否運行數據處理軟件,如果計算數值超出指標范圍,再控制是否調整被測銣鐘。為了提高計算精度,采集到的測量數據應進行粗差剔除后再參與計算;所有計算結果和指令執行信息均存儲在本地專用數據庫中,便于事后查詢分析。遠程在線校準系統校準銣鐘工作模式見圖2。
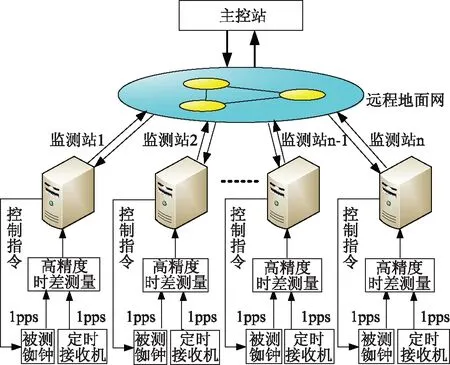
圖2 遠程在線校準系統工作模式
3.3.2 技術特點
針對衛星導航系統監測站銣鐘校準工作開發遠
程在線校準系統,需具備以下技術特點:
(1)主控站與監測站之間能夠保持良好的網絡通信能力,便于遠程操控監測站數據處理機。
(2)監測站上必須配置高精度定時接收機提供參考標準秒信號,配置時間間隔測量設備實現被測信號與參考信號的時差測量。
(3)監測站上需要研制數據采集與處理軟件,完成測量數據的粗差剔除、擬合等處理,并將測量結果存儲在本地數據庫。
(4)監測站銣鐘需具備接收控制指令自動調整頻率的能力。
4 優缺點比較
實驗室頻率校準存在成本高、測試周期長、依賴于實驗室、需要整站停機等缺點;小型測試校準儀較好的解決了監測站整站停機后影響系統連續入站的問題,具備集成度高、易于攜帶,測試周期短、測試校準精度高、可靠性好等特點;通過地面網遠程校準銣鐘的方法,能夠實現在主控站對監測站銣鐘進行校準,可節省人力資源、提高自動化程度。三種方法涉及的各項因素比較見表1。
5 結束語
監測站銣鐘的頻率準確度對觀測數據質量有直接影響,校準銣鐘時應盡量不采用中斷監測站運行的銣鐘送檢方式;由于監測站處于無人值守工作狀態,利用小型校準測試儀進行年度巡檢維護工作,可以作為一種可靠、準確的校準方法;遠程在線校準方法效率最高,尤其是對偏遠地區的監測站銣鐘校準具有明顯優勢,但其推廣應用受限于頻率參考源、測量儀器與監測站設備之間的一體化設計,校準操作依托于地面網絡也需要進一步進行工程實踐。
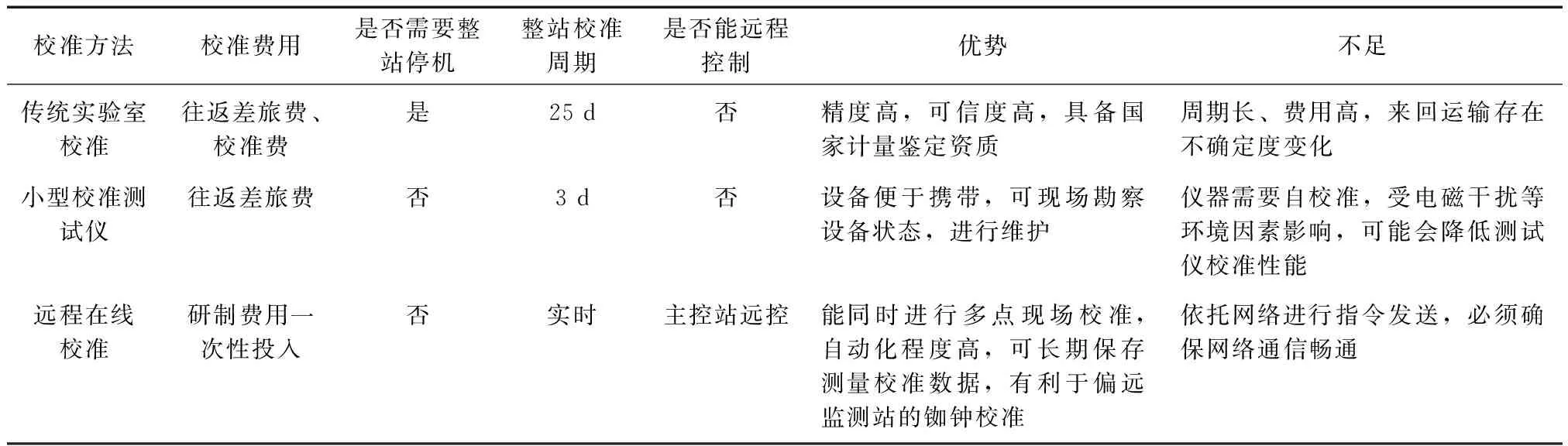
表1 三種方法涉及的各項因素比較
[1] 郭海榮,楊升,何海波.導航衛星原子鐘頻率漂移特性分析[J].全球定位系統,2007(6):5-10.
[2] JJG 292-2009, 銣原子頻率標準檢定規程[S].
[3] GJB/J 3073-97, 全球定位系統(GPS)時間頻率接收機檢定規程[S].
[4] 張瑩,周渭,梁志榮.基于GPS鎖定高溫晶體振蕩器技術的研究[J].宇航計測技術,2005,(25)1:54-58.
[5] 王玉珍,才瀅,付永杰.高精度無間隙視頻測量技術的研究[J].電子測量與儀器學報,2009,23(1):70-74.
[6] 崔保珍,王玉珍.GPS馴服銣鐘頻標數據處理方法研究[J].電子測量與儀器學報,2010,24(9):808-813.
[7] 瞿穩科,鄒本杰,陳天立.基于數據融合的增強系統參考站外頻標的設計[J].全球定位系統,2011(3):18-20.
[8] 馬煦,孔維,孫海燕.基于GPS馴服銣鐘的頻率校準系統設計[J].電訊技術,2011,51(10):109-112.
[9] 杜燕,劉陽琦,潘紅芳,等.銣原子頻標遠程在線校頻方案設計[J].電訊技術,2012,52(6):1051-1053.
[10] 倪媛媛,胡永輝,何在民.北斗衛星校準銣鐘單元的設計與實現[J].數字通信世界,2012(12):60-63.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00