三維編織復合材料編織工藝過程仿真研究*
2014-01-24 06:55:32肖來元寇曉菲左惟偉
計算機工程與科學 2014年4期
關鍵詞:編織
肖來元,寇曉菲,左惟偉
(華中科技大學軟件學院,湖北 武漢 430074)
三維編織復合材料編織工藝過程仿真研究*
肖來元,寇曉菲,左惟偉
(華中科技大學軟件學院,湖北 武漢 430074)
總結了四步編織工藝的運動規律。對紗線的空間坐標進行三次B樣條曲線擬合得到擬合坐標;設計實現了紗線實體的靜態模型算法,根據擬合坐標得到紗線空間網格坐標并建立了紗線實體的靜態模型;實現了紗線軌跡的動態展示以及實體生成過程的動態展示;構建了GUI界面并編譯成了可脫離Matlab環境的獨立運行程序。
三維編織;靜態模型;動態仿真;圖形用戶接口
1 引言
三維編織復合材料是一種新型的復合材料,雖然其出現較晚,發展時間不長,但是已經在國民經濟各個領域,特別是在航天航空領域占據重要地位。傳統的二維材料受力之后易分層,嚴重影響其力學性能,而三維編織復合材料一次成型不分層,因此具有高的比模量和比強度、抗沖擊、耐腐蝕、良好的疲勞抗性等。目前最常用的三維編織方法是四步法和二步法,且四步法是研究最多的編織方法[1,2]。
本文將三維編織工藝和計算機仿真技術相結合,以方形截面和圓形截面的四步法三維編織復合材料為例,研究其運動規律,建立靜態網格模型和靜態實體模型,同時進行運動仿真。
2 三維編織復合材料四步編織運動
四步編織運動是最常用且被研究得最多的編織工藝,下面分別以方形截面和圓形截面為例,對四步編織運動進行簡要說明。
2.1 方形截面四步編織運動
方形截面四步編織運動每四步為一個機器循環,具體的編織過程如圖1所示。由圖1可知,方形截面的四步編織運動第一步和第三步沿水平方向運動一個位置,且一、三步的運動方向相反;第二步和第四步沿豎直方向運動一個位置,且二、四步的運動方向相反。為了區分每個攜紗器,方便觀察特定攜紗器的運動規律,給每個攜紗器都按照所在的行列編號,且由圖1我們可以得到以下結論:
(1)如果某個攜紗器當前的位置已經確定,則可以根據這個攜紗器是處于內部、表面、次表面還是邊界來確定此攜紗器上一個機器循環之前的位置和下一個機器循環之后的位置。
(2)任何一個攜紗器經過有限個機器循環S后都會回到初始的位置,S僅和m 和n有關[3]:S=4*(m*n+m+n)/g,g為m 和n的最大公約數,其中m為主體攜紗器陣列中攜紗器的行數,n為主體攜紗器陣列中攜紗器的列數。
(3)任何一個攜紗器在第一次回到初始位置的運動過程中,每個機器循環所經過的位置都不會重復。
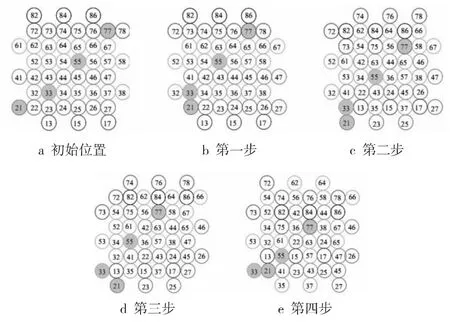
Figure 1 Four-step braiding motion of square section圖1 方形截面四步編織運動
2.2 圓形截面四步編織運動
圓形截面的四步編織運動不同于方形截面。圓形截面的編織運動:第一步和第三步所有的攜紗器沿徑向運動一個位置,且一、三步的運動方向相反;第二步和第四步基本陣列中的攜紗器沿周向運動一個位置,且二、四步的運動方向相反。由編織規律可知,排列在圓環最內側和最外側的攜紗器只參與一、三步的徑向運動,并不參與二、四步的周向運動。
圓形截面算法設計的中心環節便是坐標變換。圖2給出了方形截面和圓形截面四步編織運動之間的關系。由圖2可知,如果把圓形截面展開,把圓環內徑拉伸到與外徑相同的長度,就能把圓形截面變換成方形截面。同時,圓形截面原本的周向運動在變換成方形截面之后變為了平行于X軸的水平運動;而圓形截面中的徑向運動在變換成方形截面之后變成了平行于Y軸的豎直運動。由此可知,只需將方形截面三維編織復合結構的靜態網格坐標進行一定的坐標變換,便可以得到圓形截面三維編織復合結構的靜態網格坐標。
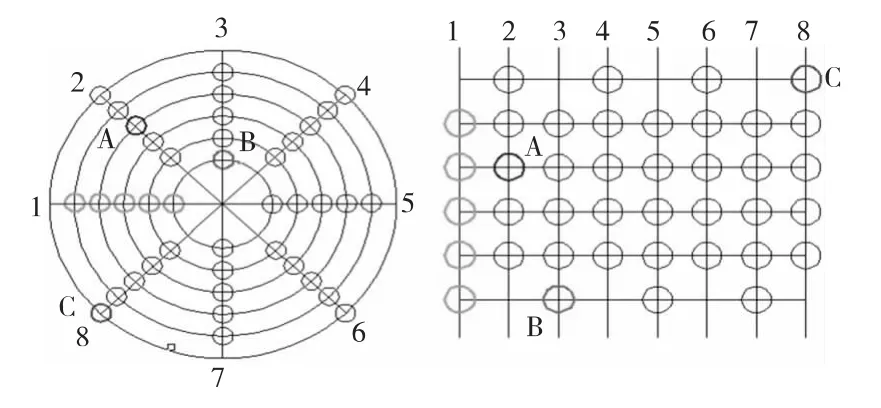
Figure 2 Four-step braiding motion of circular section and square section圖2 圓形截面和方形截面四步編織運動
2.3 三維編織復合結構的靜態網格坐標
由四步編織運動的編織規律,結合網格坐標法的思想[4],便可以模擬四步編織運動,分別得到方形截面和圓形截面三維編織復合結構的靜態網格坐標,為建立三維編織復合材料靜態實體模型奠定基礎。
3 三維編織復合材料靜態實體模型
靜態實體模型能直觀地展示紗線實體空間的繞行情況,由于Matlab并不提供繪制紗線實體模型的函數,所以我們需要自己編寫函數來繪制紗線實體。為了實現三維編織結構構件的靜態實體模型,我們必須首先做如下假設:
(1)紗線的橫截面為理想狀況的圓形,并沿紗線軸向方向是均勻的。
(2)所有紗線都具有相同的直徑。
(3)紗線處于理想狀況,即紗線在相互交織、相互擠壓受力時,紗線的形狀不發生改變。
在滿足如上的假設前提下,結合上一節求出的三維編織復合材料四步編織運動后的靜態網格坐標,并對此坐標進行三次B樣條曲線擬合得到擬合坐標,最后由此坐標作為紗線軸線坐標繪制出靜態實體模型。
3.1 三次B樣條曲線擬合
B樣條有許多定義方式,但在應用上較為簡便且常用的是de Boor-Cox公式。由de Boor-Cox公式推導出三次B樣條曲線為[5]:
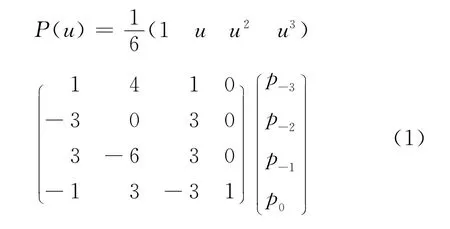
上式是在u∈[0,1]的范圍內求得的,規定每段曲線用100個節點來擬合曲線段,由上式運用Matlab設計算法便可得到三次B樣條曲線的擬合坐標。
3.2 坐標變換
坐標變換的實質:空間擬合坐標做差分,令差分為紗線實體橫截面圓面的法向量,由法向量、空間擬合坐標和紗線橫截圓面的半徑可以求得紗線實體的空間網格坐標。求解的方法是令法向量平移到坐標原點進行平移變換;規定一基準點并求出基準點的空間坐標;使得基準點繞法向量旋轉求出旋轉軌跡坐標矩陣,則此坐標矩陣即為紗線實體的空間網格坐標集合。
(1)平移變換。
假設空間一點的坐標為 (x′,y′,z′),平移后的坐標為 (x,y,z),則平移方程為:
(2)圓上基準點坐標。

由圖3可知,點F為圓上的一個特殊點,其空間坐標很容易求得,但圓上其它點的空間坐標比較難求。我們可以把點F看作是基準點,圓上其它的點都是該基準點繞著圓的法向量OB旋轉而形成的,這樣就可以把圓上其它點坐標的問題轉化為點繞已知向量旋轉的問題,這在一定程度上簡化了運算。
(3)點繞任意向量旋轉。
如圖4所示,已知一過原點的向量u,要求繞向量u逆時針旋轉θ角在笛卡爾坐標系中的標準自然基下的齊次變換矩陣。既然在標準自然基下,坐標軸上的旋轉變換矩陣很容易求得,那么我們在做旋轉變換的時候一定要選好基。然而結果是要求在標準自然基下的,直接求解比較麻煩,我們通過構造一個適當的正交基來求解問題,然后根據過度矩陣與坐標的關系,轉換到標準自然基下,具體的求解過程如下所示:
Figure 3 Reference point F圖3 基準點F
Figure 4 Structural map of orthonormal basis圖4 標準正交基構造圖
(1)為了簡化計算,我們不妨設向量w為單位向量。
(2)構造我們的標準正交基。如圖4所示,我們首先在空間中取不在向量w上的任意一點P,則向量u與向量OP可以確定一個平面。在平面u-OP中,將OP投影到u上,得到向量OM 和向量ON,則:將向量ON單位化并取反向(跟右手坐標系一致),得到單位向量v,最后:


那么,u、v、w組成了新的標準正交基,如圖4所示。
(3)進行旋轉變換。可以看出,集合 {x|x=ku,k為實數}與集合{z=x+y|x=mv,y=nw;m、n為實數}都是旋轉變換的不變子空間,其中前者還是旋轉軸。那么,我們很容易得出這個旋轉變換在基{u,v,w}下的變換矩陣是:
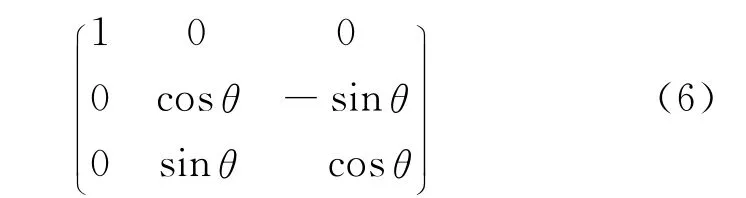
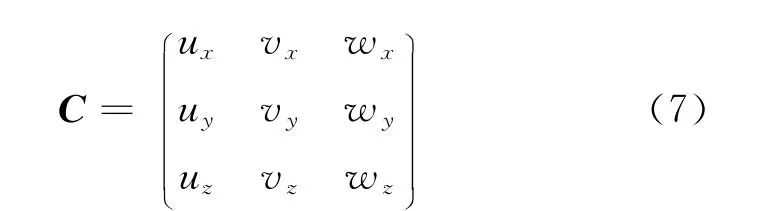
又可以求出由標準自然基到基{u,v,w}的過
度矩陣C為:
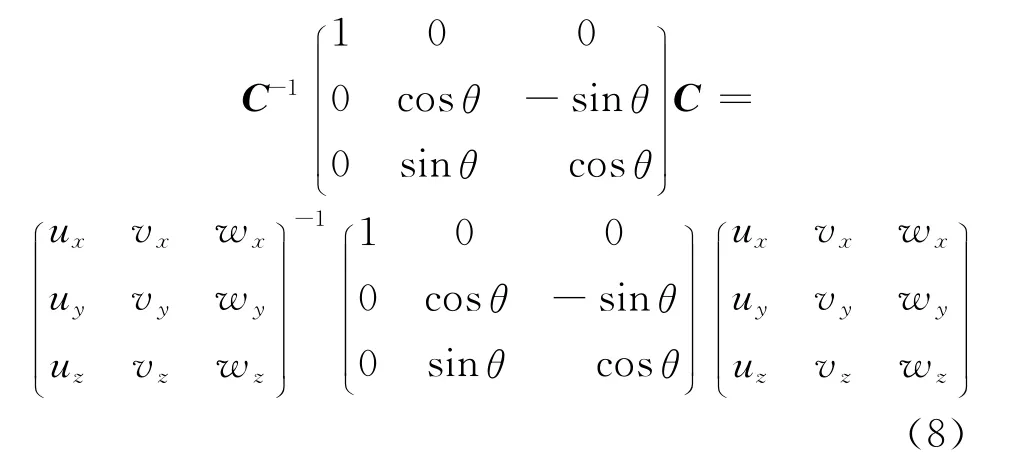
那么可以求得在自然基下這個旋轉變換的矩陣是:
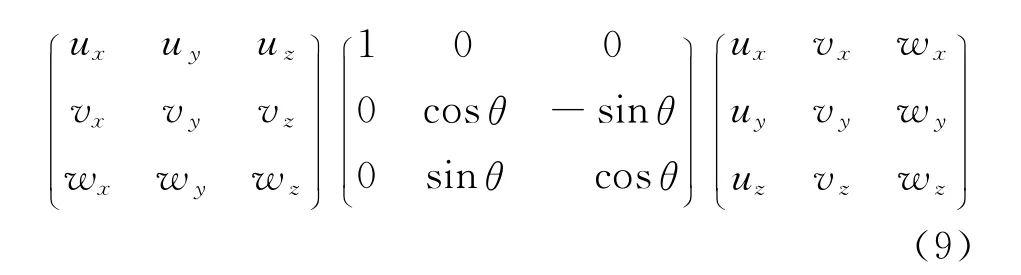
又{u,v,w}也是標準正交基,因此過度矩陣C也是正交矩陣,正交矩陣的逆矩陣等于自己的轉置。最后,在自然基下的矩陣為:
(4)求出齊次變換矩陣,并代入變化量為已知值,最后化成四階的齊次矩陣。
由以上公式,運用Matlab設計算法可以求得紗線實體的空間網格坐標。
3.3 靜態實體模型
由3.1節和3.2節可求得紗線實體的空間網格數據,利用Matlab自身所具有的surf和patch函數,可以得到靜態實體模型。圖5a為方形截面四步法6*6三維編織靜態實體模型,圖5b為圓形截面四步法4*8三維編織靜態實體模型。
4 三維編織過程紗線軌跡動態展示和實體動態生成
4.1 三維編織過程紗線軌跡動態展示
用Matlab進行動畫制作主要有三種方式:電影動畫、擦除動畫和質點動畫。根據各種動畫制作的特性,我們選擇擦除動畫作為三維編織過程紗線軌跡的動態展示。
繪制攜紗器的運動過程,我們希望能夠達到攜紗器運動但是其運動所經過的軌跡并不保留的效果;而對于紗線的空間運動,我們希望保留其運動軌跡。根據擦除動畫制作的描述,我們可以把攜紗器對象的擦除屬性“EraseMode”設置成Xor,這樣就可以滿足攜紗器的動畫制作要求;同時,紗線的空間運動希望保留其運動軌跡,我們通過plot3函數就能夠滿足其要求。程序設計總的思想是:每一個運動步驟畫出所有的攜紗器及紗線對象;然后刷新屏幕,下一個運動步驟再畫出所有的攜紗器及紗線,循環往復直到所有的運動步驟都完成為止。
我們以第3節求出的三次B樣條曲線的擬合坐標作為紗線運動的空間坐標來設計算法,繪制出四步法方形截面紗線的動態軌跡圖。
圖6為方形截面四步法4*4三維編織紗線軌跡動態展示圖截圖。
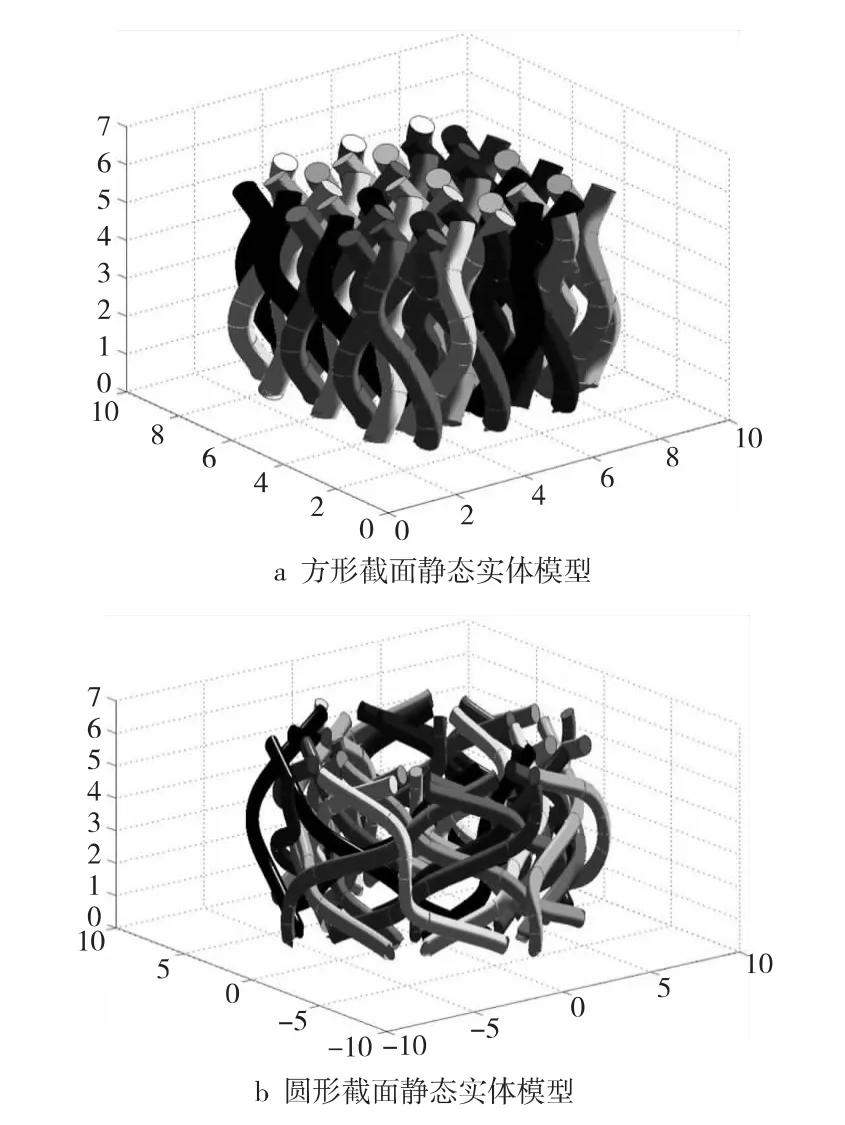
Figure 5 Static entity model圖5 靜態實體模型
4.2 三維編織過程紗線實體動態生成

Figure 6 Dynamic display figure of the yarn trajectory圖6 紗線軌跡動態展示圖

Figure 7 Dynamic display of the yarn entity generation process圖7 紗線實體生成過程動態展示
5 三維編織成型工藝仿真GUI
GUI是圖形用戶界面,像許多高級編程語言一樣,Matlab也有用戶界面開發環境。在Matlab環境下設計GUI,可以設計出簡潔的界面,通過點擊GUI界面上的按鈕調用某些函數來實現預定的功能。
本文主要設計實現三維編織成型工藝GUI,整個GUI可實現編織工藝參數的輸入、根據參數完成方形截面和圓形截面四步編織法的靜態網格模型和靜態實體模型的繪制、紗線軌跡生成的動態展示、紗線實體動態生成過程的展示等功能。
GUI設計界面如圖8所示,對于方形截面來說,圖中所需輸入的編織參數m和n分別為主攜紗器陣列的行數和列數;對于圓形截面來說,m和n分別為主攜紗器陣列徑向攜紗器數和周向攜紗器數,Rin和Rout為圓形截面編織物的內徑和外徑。
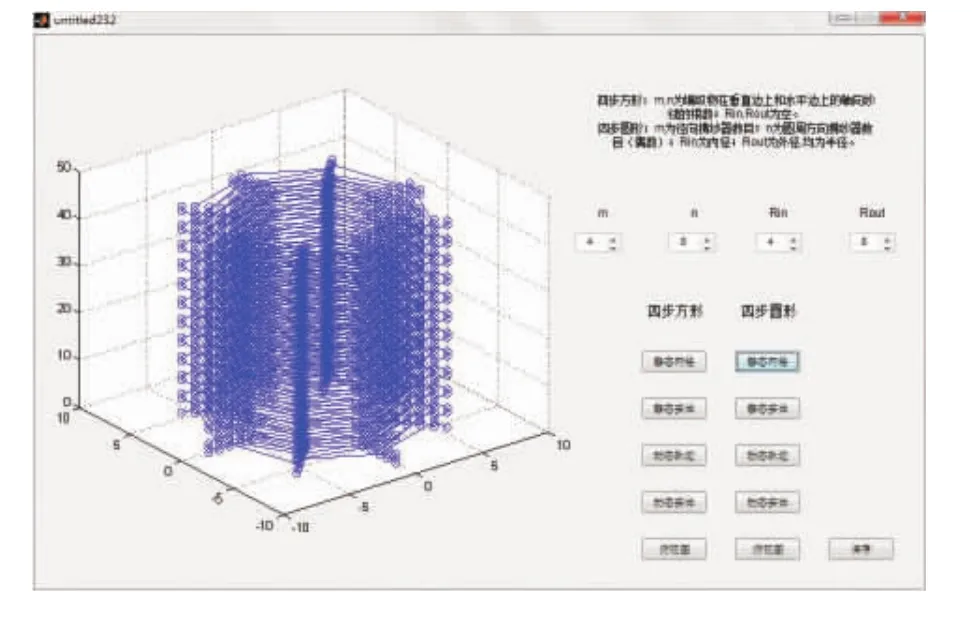
Figure 8 GUI of 3-D braiding process圖8 三維編織工藝GUI
6 結束語
本文以四步編織法為基礎,建立了方形截面和圓形截面三維編織復合結構的靜態實體模型,實現了紗線軌跡運動的動態展示和紗線實體的動態生成展示,并設計實現了三維編織成型工藝仿真GUI。
本文構建的三維編織成型工藝GUI,使用戶的操作更加方便,不需要了解函數的功能和調用方式便可以方便地實現所需的功能,并可以根據不同的編織參數建立不同的模型,僅需輸入編織參數,點擊所需功能的按鈕便可以完成功能需求。用戶可以通過本設計,在產品生產之前就直觀地了解各種編織參數下產品的形狀以及紗線的運動軌跡和紗線實體的生成過程。這在很大程度上縮短了產品的設計、生產和交付周期,降低了生產成本,提高了生產效率。
本文建立的均為數學模型,并沒有考慮紗線之間相互力的作用,也沒有考慮紗線的大小和編織過程中編織速度的影響。
紗線的大小和編織過程中編織速度的不同均可能影響最終編織物的幾何形狀,這均為今后進一步研究的重點之一。
[1] Dong Fu-yun,Wang Chun-min,Dong Juan.Development and application of 3Dtextile composites[J].Fiber Composites,2001,37(3):37-40.(in Chinese)
[2] Sun Xue-kun,Sun Chang-jie.Mechanical properties of threedimensional braided composites[J].Composite Structures,2004,65(3-4):485-492.
[3] Han Qi-rui.Pattern of the bobbin movement in 3-D braid process for composite[J].Journal of Tianjin Institute of Textile Science and Technology,1994,13(2):1-5.(in Chinese)
[4] Wang Bo-feng.Study on the geometric molding simulation and algorithm of 3Dbraided composites[D].Wuhan:Huazhong University of Science and Technology,2006.(in Chinese)
[5] Wang Ren-hong,Li Chong-jun,Zhu Chun-gang.Computer geometry tutorial[M].Beijing:Science Press,2008.(in Chinese)
附中文參考文獻
[1] 董孚允,王春敏,董娟.三維紡織復合材料的發展和應用[J].纖維復合材料,2001,37(3):37-40.
[3] 韓奇睿.復合材料三維編織工藝底盤運動規律[J].天津工業大學學報,1994,13(2):1-5.
[4] 汪博峰.三維編織復合材料幾何成型仿真及算法研究[D].武漢:華中科技大學,2006.
[5] 王仁宏,李崇軍,朱春鋼.計算機幾何教程[M].北京:科學出版社,2008.
Study on the simulation of 3-D braided composites braiding process
XIAO Lai-yuan,KOU Xiao-fei,ZUO Wei-wei
(School of Software,Huazhong University of Science and Technology,Wuhan 430074,China)
The motion law of four-step braiding technique is summarized.Through cubic B-spline curve fitting,the fitting coordinates can be got from the spatial coordinates.The algorithm that can achieve the static model of yarn entity is designed.Based on the fitting coordinates,the yarn space grid coordinates and the static model of the yarn entity are obtained.The dynamic display of the yarn trajectory and the yarn entity generation process is achieved.The GUI interface is designed and the program that can be independent from the Matlab environment is compiled.
3-D braiding;static model;dynamic simulation;graphical user interface(GUI)
TP391.9
A
10.3969/j.issn.1007-130X.2014.04.025
2012-07-30;
2013-01-28
國家自然科學基金資助項目(51145010)
通訊地址:430074湖北省武漢市華中科技大學軟件學院
Address:School of Software,Huazhong University of Science and Technology,Wuhan 430074,Hubei,P.R.China
1007-130X(2014)04-0719-06
book=0,ebook=341
肖來元(1957-),男,湖北松滋人,博士,教授,研究方向為軟件工程。E-mail:Xiao.l.y@263.net
XIAO Lai-yuan,born in 1957,PhD,professor,his research interest includes software engineering.
寇曉菲(1987-),男,河南平頂山人,碩士生,研 究 方 向 為 軟 件 工 程。E-mail:Kxfei1987@163.com
KOU Xiao-fei,born in 1987,MS candidate,his research interest includes software engineering.
左惟煒(1973-),男,湖北漢川人,博士,講師,研究方向為機械學、機械動力學和復合材料力學。E-mail:zuo_william@yahoo.com.cn
ZUO Wei-wei,born in 1973,PhD,lecturer,his research interests include mechanism,mechanical kinetics,and mechanics of composite materials.
猜你喜歡
作文周刊·小學一年級版(2025年8期)2025-04-08 00:00:00
環球時報(2022-11-03)2022-11-03 05:18:49
少兒科學周刊·兒童版(2022年10期)2022-06-27 16:36:06
保健與生活(2022年7期)2022-04-08 21:33:36
現代裝飾(2020年11期)2020-11-27 01:47:36
少兒美術(快樂歷史地理)(2019年6期)2019-10-12 08:21:30
啟蒙(3-7歲)(2019年5期)2019-06-27 07:24:54
家庭影院技術(2018年4期)2018-05-09 07:07:54
Coco薇(2017年7期)2017-07-21 07:16:04
創新作文(小學版)(2017年33期)2017-04-04 02:02:20