智能一體化電站變流裝置逆變控制策略
2014-01-25 03:22:24解大賈玉健顧羽潔艾芊金之儉顧潔
電機與控制學報 2014年11期
關鍵詞:系統
解大, 賈玉健, 顧羽潔, 艾芊, 金之儉, 顧潔
(上海交通大學電子信息與電氣工程學院,上海200240)
0 引言
電動汽車以其污染小、噪聲低、能源效率高和能源來源多元化等優點備受青睞,成為現代汽車工業發展的方向之一[1-4]。目前,電動汽車在許多重要技術領域已經取得了突破性的進展,接近實用化階段。然而其大規模商業化推廣仍面臨技術、經濟等方面的諸多瓶頸。
電源(儲能)技術是長期以來制約電動汽車發展的關鍵因素[5]。現有電池的能量密度仍然較低、電池組成本高昂,以鋰離子電池為例,2009年美國的電池成本為每千瓦時1000美元[6],2010年國內電池成本約為每千瓦時6000人民幣[7]。業內普遍樂觀認為鋰離子電池成本在5年內有望降低50%,但是對于用戶而言購置和維護電池組的成本仍然難以接受。
興建和升級配套的能源供給設施是制約電動汽車推廣的另外一個關鍵因素。現有科技條件下,同等效能的充電站占用的面積相當于加油站面積的5倍,數量眾多的充電站還不可避免地涉及電網峰谷差、諧波治理等問題[3,8],所以電動汽車一旦得到大規模推廣應用,必將對電力系統提出更高的要求,尤其是僅針對工業和民用用途的現有城市配電網絡需要進行新一輪大規模改造。
文獻[9]探討了電動汽車的充電方式和運營模式,文獻[10]介紹了國內外充電設施的發展現狀。目前國內外已經建成的電動汽車充電設施主要為充電樁、充電站或更換站,而建設單一的充電站、更換站受到土地資源稀缺、電池成本高、基礎設施建設重復、電網運行要求高等因素的制約,應用推廣面臨較多困難。
“智能充放儲一體化”電站將電動汽車充放電、更換站與電池儲能電站功能融合進行設計和研究,是一種良好的電動汽車能源供給設施解決方案。本文簡述一體化站的結構、功能,就其關鍵的多用途變流裝置展開深入研究,對變流裝置放電控制策略進行詳細的介紹,并在PSCAD中對拓撲結構和控制算法進行仿真。
1 電動汽車智能充放儲一體化站的設計方案
充放儲一體化站能夠分別實現充電站、更換站、儲能站的功能,滿足電動汽車能源供給,提高電池利用效率,并且能夠對儲能電池以及功率、能量進行優化控制,與電網負荷進行協調與互動,為電網提供增值服務,從而實現多方共贏。
充放儲一體化站結構如圖1所示。充放儲一體化站主要由4部分構成,分別是調度中心、多用途變流裝置、電池充換系統、梯次電池利用系統。一體化站分別與電動汽車和電網進行能量與信息的交換,實現其功能。
1)調度中心
調度中心是充放儲一體化電站的信息處理、監視和控制的中心機構。它根據和預計的變化進行判斷、決策和指揮。調度中心與汽車、電站、電網并無能量上的流動,而只有信息交換。它需要采集當前車輛運行信息,電網調度信息和一體化站運行狀況等當前信息和預計變化,做出決策后對一體化站進行控制。
2)多用途變流裝置
多用途變流裝置是連接電網和一體化站的能量通道,它通過數組整流/逆變電路與直流變換電路實現電網交流電與站內直流電之間的相互轉換。
3)電池充換系統
電池更換系統是一體化站對電動汽車用戶的服務窗口。它可以實現對電動汽車的常規充電、快速充電、更換電池組充電等多種能量供給方式。
4)梯次電池利用系統
梯次電池利用系統是退役電池的再利用場所。它可以開發電池的剩余使用價值,為一體化站和電網提供負荷調整、備用、無功支持等輔助服務。

圖1 充放儲一體化站總體結構Fig.1 General layout of integrative station
2 多用途變流裝置結構與工況
多用途變流裝置是連接電網和一體化站的能量通道,也是一體化站內子系統間配合連接的橋梁。充放儲一體化站的多用途變流裝置不僅要分別實現電網到充換系統和梯次系統的相互獨立的能量流動,還要實現梯次系統與充換系統的能量的單向流動。經過反復的仿真和論證,采用圖2所示的多用途變流裝置設計方案。
本方案采用兩組多套并聯的PWM變換器作為DC/AC變流器,之后經過一系列串聯的 Buck-Boost產生合適的充電電壓接入電池更換系統和梯次利用系統。電池更換系統中的充電電壓要低于梯次電池利用系統中的充電電壓,使得梯次電池利用系統在必要的時候能量向電池更換系統單向傳輸,而不會反向流動,兩者之間通過Boost電路相連。

圖2 多用途變流裝置設計方案Fig.2 Design proposal for muliti-purpose converter system
根據電網、車輛調度需要,一體化站要考慮車輛、電網、電池、充放電效率等多個目標之間的相互協調。多目標之間有層次之分,如正常情況以保證車輛運行為主,儲能調節為輔,而在電網緊急情況下則以支撐電網為主,只保留最小的供車輛用的電池配置。其不同情況下的運行狀態有4種:
1)充電狀態
在這種狀態下,兩組PWM變換器均工作在整流狀態,Boost電路斷開。能量從交流電網經PWM1和PWM2分別流入電池更換系統和梯次電池利用系統,站內的標準電池和梯次電池獲得合適的充電電壓和電流,得以高效充電。
2)換電狀態
此時,PWM1、2均不工作,Boost電路工作。能量從梯次電池利用系統流向電池更換系統。電池更換系統中的能量除留有小部分備用外,其余全部用來滿足車輛換取需求
3)半放電狀態
PWM1不工作,PWM2工作在逆變狀態,Boost電路斷開。電池更換系統中的能量除留有小部分備用外,其余全部用來滿足車輛換取需求。而梯次電池利用系統則工作在放電狀態,能量通過PWM2流入電網支持電網負荷高峰。
4)放電狀態
當電網發生緊急情況時,一體化站的首要目標應是支撐電網盡快恢復運行。為此,除電池更換系統中保留極少數能量供短期換電需求外,站內所有電池進行大電流放電向電網提供功率。此時,PWM1、2均工作在逆變狀態,Boost電路斷開,Vch和Vtc為適合各自電池組高效放電的電壓。另外,當站內儲能富余,而電網負荷緊張時,一體化站也可在高峰時放電運行,發揮削峰作用。
當充放儲一體化電站日常運行時,它根據電網調度和車輛調度的信息,不斷調整自己的運行狀態,通過不同的組合,使電池更換系統和梯次電池利用系統相互配合、支持,充分發揮儲能電池的使用價值,實現經濟利益和輔助服務效益。
3 放電工況的控制策略
變流裝置處于放電工況時,多臺三相變流器工作逆變并聯狀態。總體來講,逆變器并聯系統必須具備如下特征[11]:各模塊輸出電壓的幅值、頻率和相位分別對應相同;模塊之間的負載電流均分;可靈活地增減并聯模塊的數目;各模塊的熱插拔。充放儲一體化站無論是充電站還是儲能站都是由多個變流器并聯運行,可以擴充系統容量或提高系統冗余度。具體到本模型中,討論兩臺變流器并聯的控制方法。
3.1 并聯系統的工作原理及環流特性
逆變交流系統的并聯要比直流的并聯運行復雜得多,要求各個逆變電源模塊輸出電壓的幅值、頻率和相位一致,達到并聯系統最理想狀態。但是,在系統中,由于硬件的差異和負載的變化等原因,各逆變器輸出電壓的瞬時值往往不能完全相等。這樣,就會存在一定的電壓差異,從而引起逆變器之間電流不能均分,產生環流。環流對于各逆變器的功率器件和輸出濾波器都有破壞作用。因而,在逆變器并聯運行系統中,必須對逆變器的輸出電壓進行控制,以消除逆變器之間的環流,實現均流。
下面就兩個逆變器并聯運行進行分析,其并聯模型如圖3所示。IH表示電流環流。圖3中,U1=U1∠φ1,U2=U2∠φ2,U=U∠0°,X1、X2為線路阻抗,在一般的并聯控制方法中,都近似認為逆變系統各組成部分參數相差不大,所以取:X1=X2=X。

圖3 并聯系統逆變等效模型圖Fig.3 Equivalent model for inverter parallel system
逆變器1的輸出電流為

逆變器2的輸出電流為

環流為

將I0=I1+I2代入式(1)和式(2)得
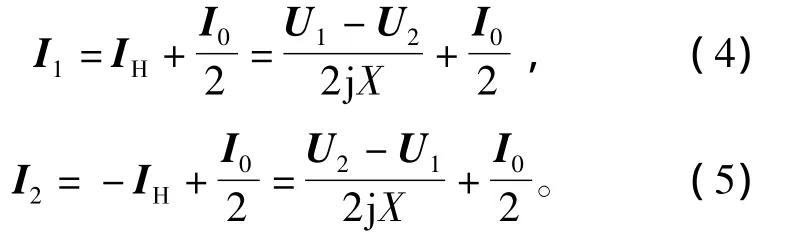
由式(4)和式(5)可以得到輸出電流包含負載電流分量和環流分量。負載電流分量總是均分的,但環流分量的存在是兩個逆變電源輸出的電流不同,因而可知環流可以用來表征逆變系統的電流均分度。由式(3)可知,當U1和U2相位相同而幅值不相等時,輸出電壓高的逆變模塊其環流分量是感性的,輸出電壓低的模塊其環流分量是容性的;當U1和U2幅值相等而相位不同時,相位超前的逆變模塊其環流分量為正的有功分量,相位滯后的環流分量為負的有功分量;當U1和U2相位、幅值都不相同時,環流分量中既有有功分量,又有無功分量。環流的相位及幅值由ΔU和逆變器等效輸出阻抗決定,與公共負載大小無關。環流的大小和相位形成了各逆變模塊之間的功率差異,承擔較大輸出功率的逆變器有可能因輸出功率超過額定功率而燒毀,或加速老化,從而縮短整個并聯系統的使用壽命,這樣就起不到并聯冗余、提高可靠性的功能了。因而,必須對環流加以控制。
3.2 逆變并聯系統的功率特性分析
由上文可知,有功功率和無功功率的分配不均是由環流引起的。所以實現有功功率和無功功率的自動均分,就是抑制環流。因而必須采取并聯控制技術實現有功功率和無功功率的自動均分,使輸出電壓的相位和幅值保持一致,從而確保逆變并聯系統穩定運行。
為了研究功率均分的三相逆變器并聯控制方法,我們首先需要分析逆變并聯系統的功率特性。分析基于圖3并聯系統逆變等效模型圖。
逆變器1的復功率為

輸出電流為

將式(6)帶入式(7),可得到

由此可得到逆變器1輸出有功功率和無功功率為

逆變器的輸出電壓U1與電壓U0之間相位差很小,所以 sinφ1=φ1,cosφ1=1。令 U1=k1U0,則有功功率和無功功率為


由式(10)和式(11)可知,逆變模塊輸出的有功功率主要取決于功率角,而輸出的無功功率主要取決于輸出電壓幅值U1和U2,因此,可以用改變逆變器輸出電壓幅值來控制無功功率,改變相位差來控制有功功率。環流中的有功環流和無功環流都將得到抑制和消除。
3.3 基于功率均分的三相變流器的逆變運行控制
通過前文對逆變并聯系統功率特性的分析,本文將采用基于有功和無功功率均分的方法來實現三相逆變系統的并聯運行。
逆變模塊并聯控制系統工作時,先對該模塊的電壓、電流有效值、有功功率和無功功率進行瞬時采樣,然后計算出所有并聯逆變模塊的有功功率均值和無功功率均值。同時各逆變模塊各自發出一個50 Hz的工頻頻率信號,發送到同步母線上進行綜合,綜合后的信號即位同步基準頻率信號fr。各并聯模塊的有功功率和并聯模塊的有功功率均值的誤差信號經過PI控制,PI調節器的輸出值與同步基準頻率fr相加,用以調整本模塊的頻率,也調整了本模塊電壓的相位。這樣就可以實現所有并聯逆變模塊輸出的有功功率相等。
同樣的,本模塊的無功功率與所有并聯模塊的無功功率均值的誤差信號,也經過PI環節,并與基準電壓Ur相加,確定本模塊的電壓幅值,從而實現所有并聯逆變模塊輸出的無功功率相等。當兩個PI控制器輸出為0時,則完全由基準頻率fr和基準電壓Ur確定本模塊的輸出頻率和電壓幅值。系統并聯控制框圖如圖4所示。圖4中,P1、PN、Q1、QN為其他模塊的有功功率和無功功率,Pk、Qk為第K個模塊的有功功率和無功功率。

圖4 基于功率均分的三相變流器的逆變并聯運行控制框圖Fig.4 Operation control block diagram of converter in parallel based on power sharing
通過并聯控制可得到參考頻率fref和電壓幅值Uref,由此可以得到變流器并網參考電壓uref,與并網電壓反饋值uf相比較,獲得電壓誤差信號,經過處理后得到電流的參考電流iref,然后與反饋電流if相比較,獲得電流誤差信號,把電流誤差信號處理之后可得到調制波信號,與三角波相比,獲得功率器件的驅動信號SPWM波。控制框圖如圖5所示。

圖5 變流器并聯系統控制框圖Fig.5 Control block diagram of converter in parallel
4 仿真結果
運用PSCAD對兩臺變流器組成的并聯系統進行仿真。直流側電壓為600 V,交流側輸出線電壓為380 V,頻率為50 Hz。采用上述控制策略,圖6是并聯后兩臺逆變器輸出電壓波形和環流波形。從圖中可以看出,環流基本為0,采用功率均分并聯控制方案可以很好地消除兩臺逆變器之間的環流,不影響逆變系統的并聯運行。

圖6 并聯后兩臺逆變器輸出電壓波形和環流波形Fig.6 Output voltage and circular current of two inverters in parallel
圖7是兩臺逆變器的輸出電流波形圖。從圖7中可以看出兩臺逆變器輸出的電流幅值、相位基本相同,基本達到均分負載的目的。需要說明的是,由于仿真時逆變器網側沒有經過RLC濾波器,而是直接與電網相連,采用電流滯環控制策略,電流波形會有一定含量的諧波成分,可通過添加濾波器環節予以消除。

圖7 兩臺逆變器的輸出電流波形圖Fig.7 Output current of two inverters in parallel
圖8和圖9是t=0.2 s時,第二臺變流器加入并聯系統,兩臺變流器各自注入電網的有功功率和無功功率圖和總的注入電流的波形變化圖。

圖8 第二臺加入并聯系統中兩臺變流器輸出的有功功率和無功功率圖Fig.8 The output of active power and reactive power with the second converter added in the parallel system

圖9 第二臺變流器加入后并聯系統注入電網的電流波形圖Fig.9 The output current curve of the system with the second converter added in
由圖9可知,t=0.2 s時,加入第二臺變流器,系統能夠很快地調整使兩臺變流器輸出相同的有功和無功功率,避免因為輸出功率不均引起環流。同時電網側電流幅值比原先迅速增長一倍,相位和頻率不變。由此可知,變流器2并入系統后,輸出的電流的幅值、相位和頻率與變流器1的基本一致,這從側面證明了變流器之間的環流非常小,基本不影響并聯系統的正常工作。仿真結果充分顯示了功率均分并聯控制方案在動態和穩態情況下具有比較高的可靠性,能夠較好地抑制環流,從而證明了此方案的可行性。
5 結論
本文圍繞電動汽車能量供給設施設計與建設,著重就其關鍵的變流裝置展開了研究,取得了以下成果:
1)根據已有的電動汽車智能充放儲一體化站的設計理念,設計了符合能量流動與控制要求的多用途變流裝置拓撲結構;
2)針對變流裝置并聯逆變工作狀態,詳細推導與分析了并聯系統的環流特性和功率特性,提出了基于功率均分的并聯逆變器控制算法;
3)在PSCAD平臺中,建立了多用途變流裝置模型,實現了前述控制算法,大量仿真波形表明,本文提出的變流裝置設計方案及控制算法可行、有效,可進一步用于一體化站設計研究。
[1]CHAN C C.The state of the art of electric,hybrid,and fuel cell vehicles[J].Proceedings of the IEEE,2007,95(4):704-718.
[2]張文亮,武斌,李武峰,等.我國純電動汽車的發展方向及能源供給模式的探討[J].電網技術,2009,33(4):1-5.ZHANG Wenliang,WU Bin,LI Wufeng,et al.Discussion on development trend of battery electric vehicles in China and its energy supply mode[J].Power System Technology,2009,33(4):1-5.
[3]高賜威,張亮.電動汽車充電對電網影響的綜述[J].電網技術,2011,35(2):127-131.GAO Ciwei,ZHANG Liang.A survey of influence of electrics vehicle charging on power grid[J].Power System Technology,2011,35(2):127-131.
[4]李佩珩,易翔翔,侯福深.國外電動汽車發展現狀及對我國電動汽車發展的啟示[J].北京工業大學學報,2004,30(1):49-54.LI Peiheng,YI Xiangxiang,HOU Fushen.Current situation of foreign electrical automobile development and its enlightenment to China[J].Journal of Beijing Polytechnic University,2004,30(1):49-54.
[5]劉平,劉和平,郭強,等.電池組直接供電對電動汽車驅動性能的影響[J].電機與控制學報,2011,15(11):27-32.LIU P,LIU H,GUO Q,et al.Effects of battery direct power supply on driving performance of electric vehicles[J].Electric Machines and Control,2011,15(11):27-32.
[6]張小雷.奧巴馬:5年內電池成本下降70%[N].中國商報,2010-7-23(B03).
[7]宋永華,胡澤春,陽岳希.電動汽車電池的現狀及發展趨勢[J].電網技術,2011,35(4):1-7.SONG Yonghua,HU Zechun,YANG Yuexi.Present status and development trend of batteries for electric vehicles[J].Power System Technology,2011,35(4):1-7.
[8]RICHARDSON P,FLYNN D,KEANE A.Optimal charging of electric vehicles in low-voltage distribution systems[J].IEEE Transactions on Power Systems,2012,27(1):268-279.
[9]周逢權,連湛偉,王曉雷,等.電動汽車充電站運營模式探析[J].電力系統保護與控制,2010,38(21):63-71.ZHOU Fengquan,LIAN Zhanwei,WANG Xiaolei,et al.Discussion on operation mode to the electric vehicle charging station[J].Power System Protection and Control,2010,38(21):63-71.
[10]魯莽,周小兵,張維.國內外電動汽車充電設施發展狀況研究[J].華中電力,2010,23(5):16-30.LU M,ZHOU X,ZHANG W.Research on development of charging facilities for electric vehicles at home and abroad[J].Central China Electric Power,2010,23(5):16-30.
[11]BOTTERóN F,PINHEIRO H,GRUNDLING H A,et al.Digital voltage and current controllers for three-phase PWM inverter for UPS applications[C]//2001 IEEE Industry Applications Conference,Sept.30-Oct.4,2001,Chicago,USA.2001,4:2667-2674.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32