混凝土泵車(chē)臂架位姿方程建立及相關(guān)參數(shù)分析
2014-01-28 07:56:56高鳳陽(yáng)
關(guān)鍵詞:系統(tǒng)
高鳳陽(yáng),王 珊,張 亞
(沈陽(yáng)建筑大學(xué) 交通與機(jī)械工程學(xué)院,遼寧 沈陽(yáng) 110168)
0 引言
機(jī)電一體化與機(jī)器人技術(shù)已成為高性能工程機(jī)械的發(fā)展方向,混凝土泵車(chē)作為現(xiàn)代建筑業(yè)有效的工具,其施工操作自動(dòng)化已逐漸受到人們的重視。為實(shí)現(xiàn)混凝土泵車(chē)操作自動(dòng)化,我們需解決:當(dāng)混凝土泵車(chē)臂架系統(tǒng)的關(guān)節(jié)角給定時(shí),確定澆筑點(diǎn)的位置;當(dāng)澆筑點(diǎn)的位置給定后,經(jīng)逆運(yùn)算反求出臂架系統(tǒng)的各個(gè)關(guān)節(jié)角的相應(yīng)值。前者稱(chēng)為混凝土泵車(chē)臂架系統(tǒng)關(guān)節(jié)角與末端位置的正解,后者稱(chēng)為反解。另外,混凝土泵車(chē)臂架系統(tǒng)是一具有冗余自由度的空間機(jī)構(gòu),因此其反解不是唯一確定的解,需要采用某些方法使多節(jié)臂的臂架系統(tǒng)達(dá)到最優(yōu)控制,且其解是唯一反解。這一理論分析為進(jìn)一步實(shí)現(xiàn)混凝土泵車(chē)臂架系統(tǒng)的自動(dòng)化和機(jī)器人化奠定了基礎(chǔ),具有實(shí)際應(yīng)用意義和理論研究?jī)r(jià)值。
1 混凝土泵車(chē)臂架系統(tǒng)位姿方程建立
混凝土泵車(chē)臂架系統(tǒng)基本是由底座、回轉(zhuǎn)機(jī)構(gòu)、大臂、中臂(以2 個(gè)為例)、小臂和軟管等部分組成的串聯(lián)開(kāi)鏈機(jī)構(gòu)。利用D-H 法建立混凝土泵車(chē)臂架系統(tǒng)的機(jī)器人化簡(jiǎn)圖如圖1 所示, 其中Zi軸與關(guān)節(jié)軸重合,Xi軸為沿著臂架的方向,Yi軸根據(jù)右手定則確定;角度θi為繞Zi軸,Xi軸到Xi-1軸轉(zhuǎn)過(guò)的角度,規(guī)定順時(shí)針為正,逆時(shí)針為負(fù)。

圖1 混凝土泵車(chē)臂架系統(tǒng)的機(jī)器人化簡(jiǎn)圖Fig.1 A simplified robot graphic of concrete pump truck boom syste

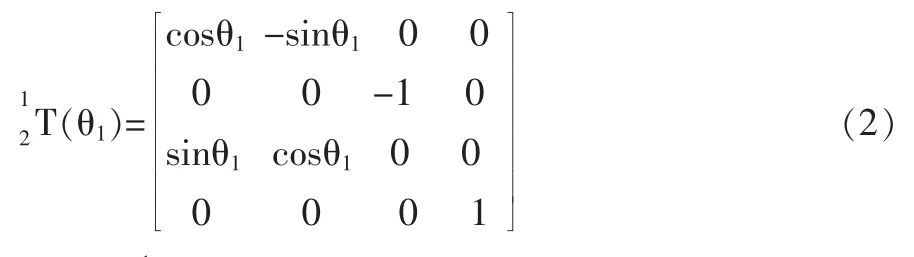


根據(jù)所建的數(shù)學(xué)模型,可以得到混凝土泵車(chē)臂架系統(tǒng)末端的坐標(biāo)系相對(duì)于基坐標(biāo)系的位姿矩陣:

式中:s0=sinθ0;c0=cosθ0;s1234=sin(θ1+θ2+θ3+θ4);
c1234=cos (θ1+θ2+θ3+θ4);px=c0[c1234l4+c123l3+c12l2+l1c1];
py=s0[c1234l4+c123l3+c12l2+l1c1];pz=s1234l4+s123l3+s12l2+l1s1。
上述式(5)的位姿矩陣為混凝土泵車(chē)臂架系統(tǒng)運(yùn)動(dòng)學(xué)正解。
2 混凝土泵車(chē)臂架系統(tǒng)的運(yùn)動(dòng)學(xué)反解
假設(shè)混凝土泵車(chē)在工作時(shí)沒(méi)有障礙物,其臂架系統(tǒng)運(yùn)動(dòng)學(xué)反解是已知澆筑點(diǎn)位置,采用合理的解法,求解出臂架系統(tǒng)的各個(gè)關(guān)節(jié)角的相應(yīng)值,并且保證解是唯一確定的,從而為混凝土泵車(chē)臂架系統(tǒng)的自動(dòng)化奠定基礎(chǔ)。
根據(jù)混凝土泵車(chē)的實(shí)際工作特點(diǎn)和要求,本文提出兩種約束解決方案:其一、混凝土泵車(chē)在工作時(shí),使四節(jié)臂的臂架整體近似呈弧形,這樣使得泵送混凝土過(guò)程中,混凝土流動(dòng)基本連續(xù),遇到的阻力最小,從而使得混凝土泵車(chē)有較小的能耗和較高的工作效率。其二、混凝土泵車(chē)在工作時(shí),在臂架整體近似呈弧形的同時(shí),使后兩節(jié)臂中的任意一節(jié)臂保持水平位置,這樣可以減弱泵管內(nèi)混凝土自由落體造成的臂架振動(dòng),避免臂架過(guò)早疲勞斷裂。兩種方案在某一時(shí)刻不同的臂架狀態(tài)如圖2、圖3 所示。
對(duì)于兩種約束方案而 言,關(guān) 節(jié) 角θ0的 大小是唯一確定的,根據(jù)式 (5),顯然,可先求得θ0的唯一解:
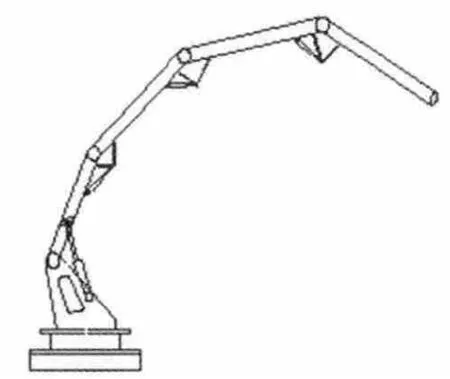
圖2 臂架整體近似呈弧形Fig.2 All the booms are similar arc
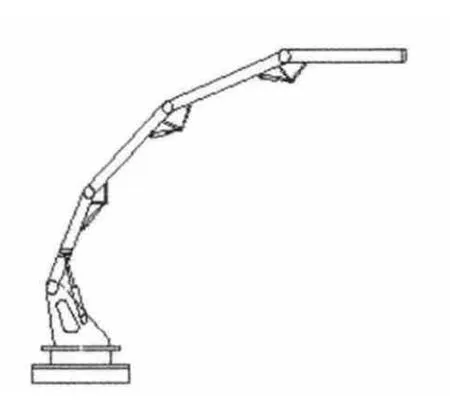
圖3 前三節(jié)臂近似呈弧形,第四節(jié)臂水平Fig.3 The Former three booms are similar arc,the fourth one is level

約束方案一:確定唯一反解的策略為首先假設(shè)臂架轉(zhuǎn)動(dòng)的最小分辨角度為2°,規(guī)定關(guān)節(jié)角之間的關(guān)系為90°-θ1=-θ2=-θ3=-θ4=θ,此為臂架整體近似呈弧形可能的條件,θ 的大小可由下面的公式求得:

這樣,先得到一組關(guān)節(jié)角的相應(yīng)值θ1、θ2、θ3、θ4,為保證泵送過(guò)程中泵送順利,防止臂架振動(dòng),初步令θ1=70°,Δθ=(70°-θ)∕3,重新取θ20=θ30=θ40=-θ-Δθ,代入式(7),求得θ10的相應(yīng)值。觀察上述求出的θ10的相應(yīng)值是否滿(mǎn)足θ10∈[0,90°],并且最接近70°,第一節(jié)臂架關(guān)節(jié)角θ1大一些,有利于操作。
其次,如果θ 無(wú)解,則說(shuō)明此澆筑點(diǎn)無(wú)法到達(dá);如果得出的θ10?[0,90°],則令θ2n=θ3n=θ4n=θ2±2n°(n=0,1…),代入式(7),求解θ1的值,直到求得偏離70°最小的n值,如果出現(xiàn)θ10∈[0,90°],偏離70°超過(guò)2°,則可根據(jù)θ2n=θ3n=θ4n=θ20±2n° (n=0,1…),代入式 (7),再次求解新的θ1n,直到求得偏離70°最近的n 值,即可得到相應(yīng)的θ2n、θ3n、θ4n的值。在上述的約束條件下,根據(jù)所列出的方程,可得出:

根據(jù)這樣的算法,θ0、θ1、θ2、θ3、θ4已完全解出,混凝土泵車(chē)臂架系統(tǒng)的運(yùn)動(dòng)學(xué)反解結(jié)束。
約束方案二:由于θ0唯一確定,可不考慮底座θ0的旋轉(zhuǎn),混凝土泵車(chē)的四節(jié)臂在同一平面內(nèi)的運(yùn)動(dòng)方程:

由式(10)和(11)可知,px1、pz1為已知值,θ1、θ2、θ3、θ4為未知數(shù),即兩個(gè)方程,四個(gè)未知數(shù),所以機(jī)器人冗余自由度為2,因此關(guān)節(jié)角沒(méi)有唯一確定的解。
約束條件一:從大量事實(shí)來(lái)看,臂架的斷裂和應(yīng)力裂縫一般都出現(xiàn)在第四節(jié)臂上,因?yàn)樵谑┕r(shí)這節(jié)臂是受振幅最大、受力變化最頻繁和擺動(dòng)最大的位置。因此假設(shè)混凝土泵車(chē)的最后一節(jié)臂水平。
此時(shí),臂架末端的坐標(biāo)系相對(duì)于機(jī)座處的基坐標(biāo)系繞X 軸轉(zhuǎn)了90°,所以式(10)中有s1234=0,c1234=1,即

約束條件二:根據(jù)約束方案一,使混凝土泵車(chē)除了第四節(jié)臂以外的前三節(jié)臂仍近似呈弧形,規(guī)定:

則有:

關(guān)節(jié)角θ1、θ2、θ3的具體解法與約束方案一中的求解過(guò)程類(lèi)似,這里不再贅述,而θ4根據(jù)式(12)得到。直到求得θ1偏離70°最近的值,即可得到相應(yīng)的θ2、θ3、θ4的值。至此,θ0、θ1、θ2、θ3、θ4完全解出。混凝土泵車(chē)臂架系統(tǒng)的運(yùn)動(dòng)學(xué)反解結(jié)束。
3 混凝土泵車(chē)臂架系統(tǒng)的運(yùn)動(dòng)學(xué)反解算例
已知混凝土泵車(chē)臂架系統(tǒng)末端的位置:px=18.2m,py=10.5m,pz=16.6m,各個(gè)臂架的長(zhǎng)度:l1=9.1m,l2=7.889m,l3=7.680m,l4=7.934m,求解各個(gè)關(guān)節(jié)角的相應(yīng)值。兩種約束方案解答過(guò)程中的θ0、θ1、θ2、θ3、θ4如表1和表2 所示。根據(jù)式(6)可得:θ0=arctan(py,px)=30°。

表1約束方案一的反解過(guò)程Tab.1Thenegativesolutionsprocessofconstraintsplanone
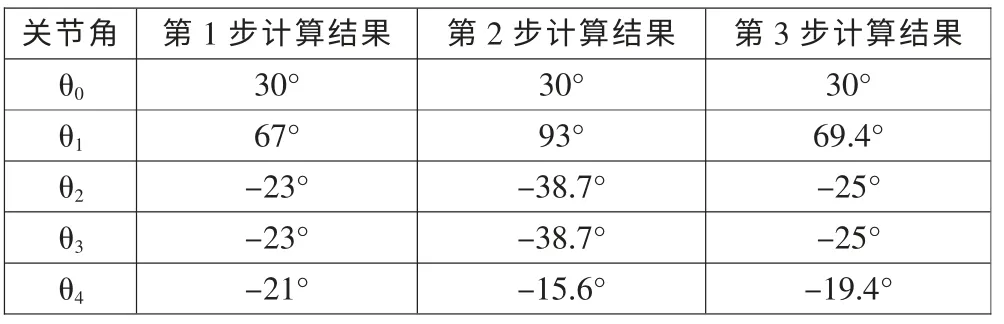
表2約束方案二的反解過(guò)程Tab.2Thenegativesolutionsprocessofconstraintsplantwo
約束方案一和約束方案二的反解均符合混凝土泵車(chē)的工作特點(diǎn)和要求,也滿(mǎn)足反解的唯一確定性要求。
4 結(jié)束語(yǔ)
本文研究結(jié)果表明:根據(jù)D-H 法可以求解出滿(mǎn)足要求的混凝土泵車(chē)的正解和反解,并且兩種反解約束方案的算法均滿(mǎn)足混凝土泵車(chē)實(shí)際工作特點(diǎn)和要求以及反解的唯一性要求,容易在控制軟件中實(shí)現(xiàn),提高了反解的運(yùn)算速度,可以作為混凝土泵車(chē)臂架的智能化控制的理論基礎(chǔ)。
[1] 梁聰慧,黃浩軒,陶澤安,胡敏,曾楊.冗余自由度機(jī)械臂的逆運(yùn)動(dòng)控制、建模與仿真[J].建設(shè)機(jī)械技術(shù)與管理,2012,9.
[2] 凌志勇,付鵬飛,劉洪慶,李廣鑫.五臂混凝土泵車(chē)臂架變幅機(jī)構(gòu)的仿真研究[J].機(jī)械設(shè)計(jì)與制造,2011,5.
[3] 郭立新,張郭忠,郭詠梅.泵車(chē)布料機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析及軌跡規(guī)劃控制建模與仿真[J].機(jī)械,2001,1.
[4] 萬(wàn)佳先.混凝土泵車(chē)臂架D-H 矩陣分析和仿真[J].科技創(chuàng)新導(dǎo)報(bào),2011,17.
[5] 謝志江,李誠(chéng),劉楠,倪衛(wèi).6 自由度裝校機(jī)器人逆解的確定[D].吉林大學(xué)學(xué)報(bào),2012,6.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
