風機超速問題應對策略研究
2014-02-08 05:26:17曹碧生邵勤豐孟新光劉小艷劉顯波王東升
東方汽輪機 2014年3期
曹碧生,邵勤豐,孟新光,劉小艷,劉顯波,王東升
(東方電氣自動控制工程有限公司,四川德陽,618000)
風機超速問題應對策略研究
曹碧生,邵勤豐,孟新光,劉小艷,劉顯波,王東升
(東方電氣自動控制工程有限公司,四川德陽,618000)
文章針對大風大湍流下風機容易發生超速的問題,深入研究風機控制算法,提出了優化變槳PI和加入轉差加速度系數的策略。Bladed仿真表明,加入超速應對策略后風機轉速平穩,變槳響應較快,功率相對平穩且未發生停機,完全可以經受大風大湍流帶來的沖擊。實際應用該策略的FD77B和FD82B型風機運行情況良好,風機超速停機故障大幅下降。理論仿真和實際應用表明,該策略科學、合理、實用,且具有一定的推廣價值。
風機超速,參數整定,算法優化
1 前言
風力發電是目前可再生能源發展的重點,也是可再生能源利用的主要方式。近年來,風力發電發展迅速,風力發電機技術有了很大的發展。風機主控系統是風機控制系統的主體,可實現自動啟動、自動調向、自動調速、自動并網、自動解列、故障自動停機、自動電纜解繞及自動記錄與監控等重要控制、保護功能。風機的控制是風力發電系統運行中的核心內容之一,即通過控制風機來實現風能的捕獲并將其轉換為電能,控制的目標是在高風速條件下,將風機的功率和速度限制在某一設定值,以免風機進入不安全運行狀態,而在低風速條件下實現風機所能捕獲的最大風能。風機的控制系統對風力發電系統的運行影響很大。因此,采用科學的控制策略至關重要。國內控制器在國產化、智能化、安全性和穩定性方面取得了很大成就。國內企業通過這幾年的努力,已經在控制系統主要部件的開發上取得了積極進展,已基本形成了自主的技術開發能力。
盡管如此,國產主控器遇到了新的挑戰和問題。眾所周知,風力發電機在遇到大風大湍流時,應限制風力發電機的風輪轉速,否則會引起風機超速。為了風機安全運行,風力發電機設置兩重保護值。當風力發電機轉速超過第一重保護值后,風機利用變槳系統快速收槳來制動風機。當風力發電機轉速超過第二重保護值后,風機利用剎車系統制動和變槳系統收槳制動共同作用讓風機停下來[1]。風機超速停機時,不僅會影響風機發電量、故障統計量、可利用率等,而且會對風機產生大的損傷。此外,在大風大湍流下,如果發生風機葉輪飛車,會造成風機葉片損毀、發電機燒毀、倒機等一系列嚴重事故。因此,為避免或者減少風機在大風大湍流下發生超速故障,展開對風機控制策略研究十分必要。
2 GH控制策略簡介
變速變槳發電機組的整個運行控制階段可以按發電機轉速劃分成4個階段,圖1為發電機轉速與扭矩關系圖[2]。在穩定狀態下,發電機轉速范圍是從S1到S2。在低風速情況下,循著一條定常葉尖速比的載荷曲線使風能捕獲量達到最大,該載荷曲線對應著以最大功率系數運行的狀態,這條載荷線是一條扭矩-轉速平面內的二次曲線,如圖1中所示的線段B-C。
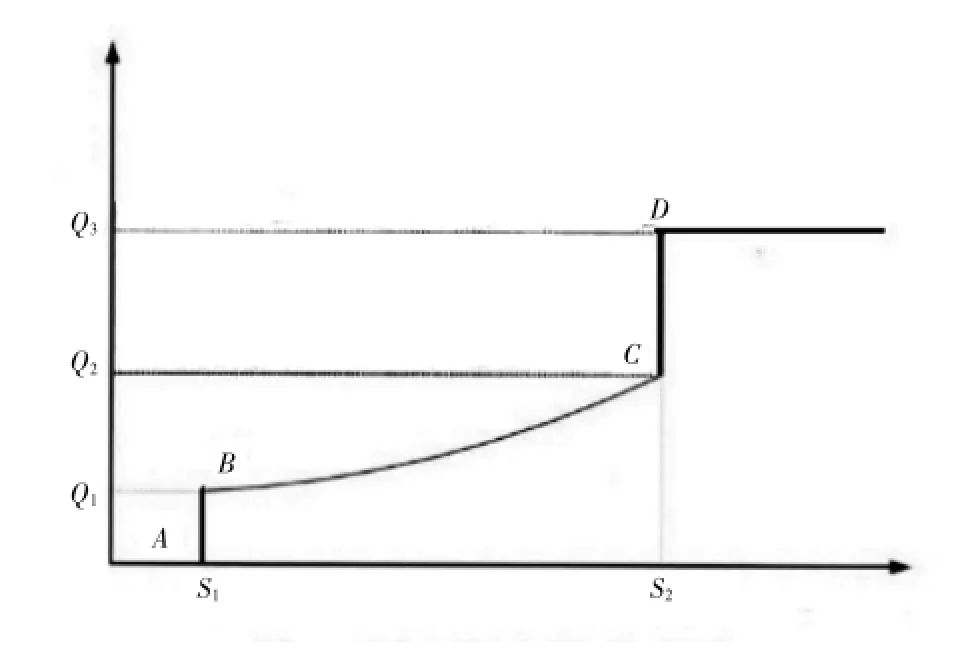
圖1 風機發電機轉速與扭矩對應曲線
在發電機轉速小于S1前,此時發電機無功率輸出,當風速大于切入轉速時發電機并網,由于發電機有最小允許運行速度S1,那么在低風速的情況下,就不可能循著B-C段曲線運行,而風機只能沿著圖中所示的線段A-B以恒定的速度運行。類似地,在高風速時,一旦達到最大運行速度S2,必然再一次脫離最佳載荷曲線而沿著線段C-D以恒定的速度運行。D點以后是功率恒定區,隨著風速增大,為了保護機組不受損壞,控制槳葉角度來保持恒定功率輸出。
3 風機超速解決策略設計
經過對風機控制策略研究,提出優化變槳PI和引入轉差加速度PI系數2種方式來解決風機超速問題。
3.1 變槳PI優化策略
通過加快變槳響應和減小超調量的方式來優化變槳PI。因此,需要對變槳PI重新整定。
變槳參數整定風速為12~25 m/s。下面為風速13 m/s時的變槳PI優化方法。
未重新整定前,13 m/s時變槳PI為:Kp= 0.009732,Ti=5.0053。圖2是風速為13 m/s時參數整定w域根軌跡圖,通過調節補償器的零極點來加快變槳響應和減小超調量。從圖3可以明顯看出,整個風機系統穩定,幅值裕度為9.21 dB,相角裕度為35.7。。參數整定后,可得出風速為13 m/s時變槳PI為:Kp=0.010568,Ti=4.9867。

圖2 13m/s時的w域根軌跡圖

圖3 13m/s時的穩定裕度圖
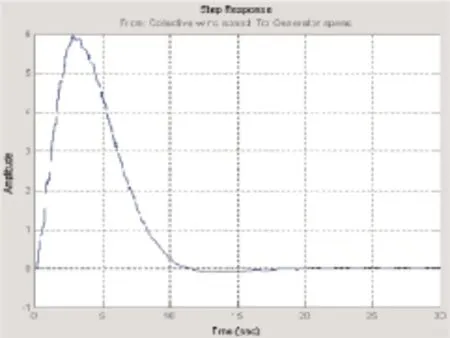
圖4 13 m/s時的風速對轉速階躍響應曲線
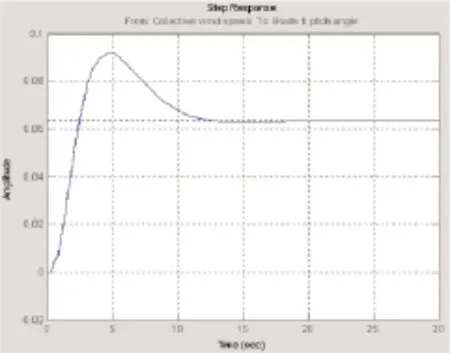
圖5 13m/s時的風速對槳葉角度階躍響應曲線
整定后的效果如圖4、圖5所示。從圖4可以看出,風速對轉速階躍響應在12 s時基本趨于穩定,較平常轉速響應穩定時間15 s明顯加快。在圖5中,風速對槳葉角度階躍響應在12 s時完全穩定,比平常轉速穩定時間快3 s。
類似地,對其它風速下的變槳PI進行整定,然后對各種風速下的結果進行線性化最終得到變槳PI線性化列表。
3.2 轉差加速度系數策略
當風機運行轉速差加速度大于某一值時,風機變槳系統在原PI的基礎上乘以相應轉差對應的系數值。其原理如下程序所示:
float genaccel[3]={N1,N2,N3};//轉差加速度值,以3個點為例
float kperr[3]={kperr1,kperr2,kperr3};//轉差系數值,以3個點為例
if(Genaccel<genaccel[1])//Genaccel為當前轉差加速度值
kp=pitchKP;//pitchKP為原始變槳PI值
else if(Genaccel>genaccel[1]&&Genaccel>genaccel[2])
kp=pitchKP*(kperr[1]+(kperr[2]-kperr[1])/(genaccel[2]-genaccel[1])*(Genaccl-genaccel [1]));
else if(Genaccel>genaccel[2]&&Genaccel>genaccel[3])
kp=pitchKP*(kperr[2]+(kperr[3]-kperr [2])/(genaccel[3]-genaccel[2])*(Genacclgenaccel[2]);
else if(Genaccel>genaccel[3])
kp=pitchKP*kperr3;
4 風機超速問題解決策略仿真測試及結果
為了驗證風機超速問題解決策略在實際風場工況下的可行性,在25 m/s大風大湍流 (如圖6所示)情況下利用Bladed軟件進行仿真,具體結果如圖7~圖9所示。
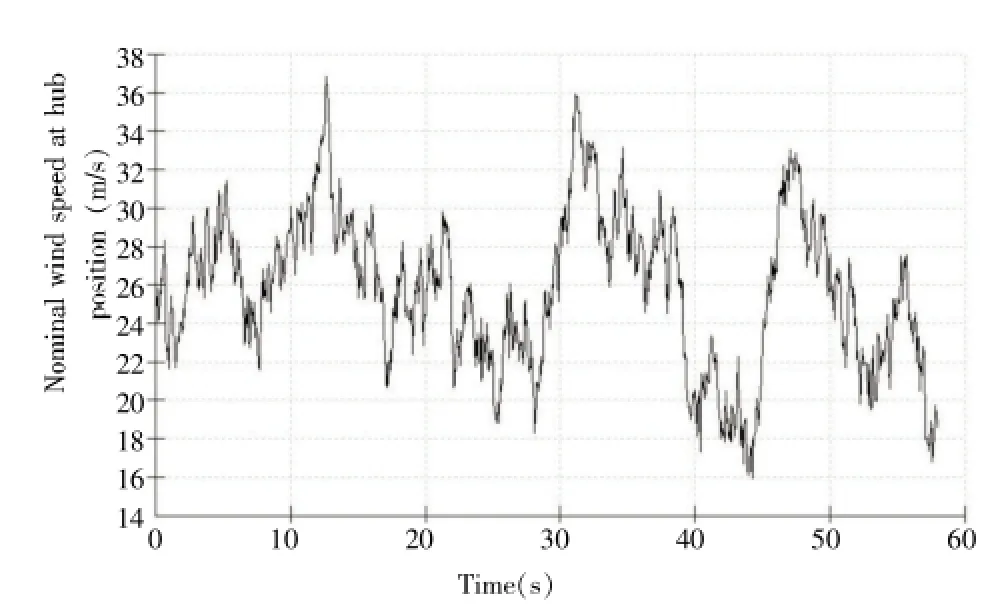
圖6 風速為25m/s 3D湍流風
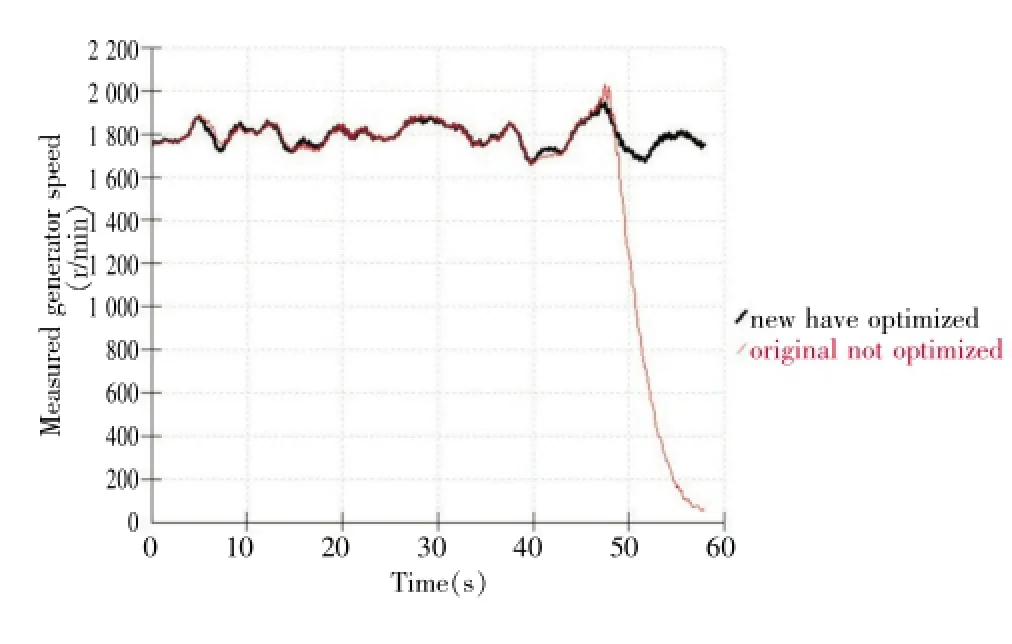
圖7 25m/s的3D湍流風下轉速對比曲線
從圖7可以看出,在25 m/s大風大湍流下,沒有加入超速應對策略的風機轉速波動偏大且在48 s左右發生停機,而加入超速應對策略的風機轉速平穩且未停機。
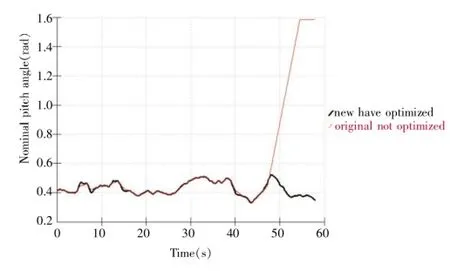
圖8 25m/s的3D湍流風下槳葉角度對比曲線
從圖8可以看出,在25 m/s大風大湍流下,沒有加入超速應對策略的風機變槳偏慢且在48 s左右發生停機,而加入超速應對策略的風機變槳響應明顯加快且未停機。
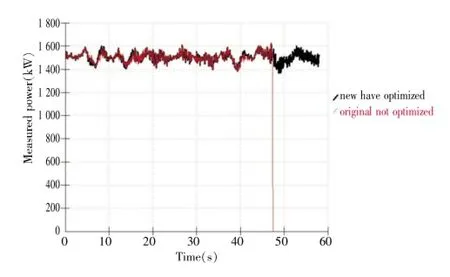
圖9 25m/s的3D湍流風下功率對比曲線
從圖9可以看出,在25 m/s大風大湍流下,沒有加入超速應對策略的風機功率波動偏大且在48 s左右發生停機,而加入超速應對策略的風機功率輸出相對平穩且未停機。
綜合圖7~圖9可知,在風速為25m/s大風大湍流下,沒有加入超速應對策略的風機轉速波動偏大,變槳響應偏慢,功率波動偏大發生停機,而加入超速應對策略的風機運行平穩且未停機。
5 結論
針對大風大湍流下風機容易發生超速問題,深入研究風機控制算法,提出了優化變槳PI和加入轉差加速度系數策略。經Bladed仿真發現,加入超速應對策略的風機轉速平穩,變槳響應較快,功率相對平穩且未發生停機,完全可以經受大風大湍流帶來的沖擊。現已實際應用該策略的FD77B和FD82B型風機運行情況良好,風機超速停機故障大幅下降。總之,不論在理論還是實際應用中,該策略科學、合理、實用,具有一定推廣價值。
[1]姚興佳,王士榮,董麗萍.風力發電技術的發展與現狀[J].可再生能源,2006,1(125):86-88
[2]Garrad Hassan&Partners Ltd.Garrad Products[EB/OL],2007: 201-205
[3]謝峰,沈維蕾,周必成.風力發電機機艙的靜、動態特性有限元分析[J].制造業自動化,2003,25(9):4-6
[4]鄧興勇,凌志光,周炳海,等.風力機設計軟件WTD 1.0氣動設計性能分析[J].上海工程技術大學學刊,2000,14(3): 167-172
[5]Simulation Tools[EB/OL].2007:201-210
[6]姚興佳,王士榮,董麗萍.風力機的工作原理[J].可再生能源,2006,2(126):87-89
[7]朱躍華.高山風電場運行的特點分析及對策[J].能源工程, 2003,26(3):25-27
[8]葉杭冶.風力發電機組的控制技術[M].北京:機械工業出版社,2002:18-20
Study on Coping Strategies forW ind Turbine Overspeed
Cao Bisheng,Shao Qinfeng,Meng Xinguang,Liu Xiaoyan,Liu Xianbo,Wang Dongsheng
(Dongfang Electric Auto Control Engineering Co.,Ltd.,Deyang Sichuan,618000)
Forwind turbine overspeed problem in gale and grand turbulence,this paper studies deeply the wind turbine control algorithm,and proposes a strategy of optimizing the pitch PI and adding the speed difference acceleration coefficient.The Bladed simulating result shows that the wind turbine added coping strategies for wind turbine overspeed problem acts smoothly,rapid in pitch response,stable in power output and without shutdown,and can withstand the impact of gale and grand turbulence.The wind turbine adopted such strategy in FD77B and FD82B runswell,and the wind turbine overspeed fault is dropped significantly.Theoretical simulation and practical application results show that the strategy is scientific,reasonable,practical,and has some promotional value.
wind turbine overspeed,parameter tuning,algorithm optimization
TP13
:A
:1674-9987(2014)03-0062-04
曹碧生(1986-),男,助理工程師,碩士,2012年畢業于昆明理工大學控制理論與控制工程專業,主要從事風機程序設計及控制算法研究工作。
猜你喜歡
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31
時代英語·高三(2014年5期)2014-08-26 02:49:51