基于繼電反饋的PID參數(shù)自整定
2014-02-10 07:01:42韓震宇
機(jī)電工程技術(shù) 2014年7期
侯 洪,韓震宇
(四川大學(xué),四川成都 610065)
基于繼電反饋的PID參數(shù)自整定
侯 洪,韓震宇
(四川大學(xué),四川成都 610065)
針對(duì)PID參數(shù)難以整定的不足,提出一種基于繼電反饋的PID自整定方法。該方法利用繼電反饋原理對(duì)PID參數(shù)進(jìn)行自整定,從而提高了參數(shù)整定的靈活性。給出了基于任意相位裕度的PID參數(shù)自整定公式,并進(jìn)行了仿真實(shí)驗(yàn)驗(yàn)證。
繼電反饋;PID;參數(shù)整定;相位裕度
PID控制方法算法簡單,魯棒性好,而且不依賴于被控對(duì)象的精確模型,因而成為目前工業(yè)控制中運(yùn)用廣泛的控制方法[1-2]。但PID參數(shù)本身整定困難,而且所整定的某組參數(shù)一般只適用于一種工況。因此,實(shí)現(xiàn)PID控制器參數(shù)自整定具有重要意義。
Astrom與Hagglund共同提出了一種以繼電非線性環(huán)節(jié)為核心的PID控制器參數(shù)自整定方法[3]。該方法不需要過程的先驗(yàn)知識(shí),可以自動(dòng)地從被控對(duì)象的頻率響應(yīng)中抽取信息,進(jìn)而整定PID控制器的參數(shù)。行系統(tǒng)臨界信息獲取,通過繼電器發(fā)出繼電激勵(lì)信號(hào),從而由系統(tǒng)的響應(yīng)曲線來計(jì)算出該系統(tǒng)的振蕩頻率和振蕩幅值,然后由獲得的臨界信息并根據(jù)確定的整定公式整定PID參數(shù);控制狀態(tài)是采用整定的PID參數(shù)來控制系統(tǒng)。如果系統(tǒng)的測試條件發(fā)生變化,則需要重新回到測試狀態(tài)進(jìn)行測試,測試完成后在回到控制狀態(tài)。
1 繼電反饋整定法的基本原理
繼電反饋控制系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。圖中r(t)是參考信號(hào),在繼電反饋系統(tǒng)中通常目標(biāo)值被設(shè)為0;e(t)是偏差;u(t)是被控對(duì)象的輸入;y(t)是被控對(duì)象的輸出。
繼電反饋整定法是在被控系統(tǒng)中設(shè)置兩種狀態(tài):測試狀態(tài)和控制狀態(tài)。測試狀態(tài)的作用是進(jìn)

圖1 繼電反饋控制系統(tǒng)
在繼電反饋測試狀態(tài)下,被控系統(tǒng)只要至少具有-π的相位滯后就可以產(chǎn)生臨界振蕩,這樣就可以獲得臨界信息,然后應(yīng)用選定的整定公式來進(jìn)行控制器參數(shù)整定[3]。
2 繼電器特性的選擇
為了克服外部干擾的影響,在采用繼電反饋方法進(jìn)行系統(tǒng)臨界信息獲取時(shí),需要為被控系統(tǒng)設(shè)定合理的繼電器特性值。
理想繼電特性環(huán)節(jié)對(duì)噪聲反映及其靈敏,因此該繼電特性不適合用于存在有色噪聲或強(qiáng)白噪聲的工業(yè)現(xiàn)場[3]。用一個(gè)對(duì)稱的帶滯環(huán)的繼電器(如圖2所示)取代理想繼電器是有利的,這樣的系統(tǒng)對(duì)噪聲的靈敏度會(huì)減小。同時(shí),當(dāng)被控對(duì)象的Nyquist曲線直接從第三象限穿越負(fù)虛軸到第四象限時(shí),采用理想繼電環(huán)節(jié)就不會(huì)形成極限振蕩環(huán),而采用具有滯環(huán)的繼電環(huán)節(jié)能解決這樣的問題。

圖2 帶有對(duì)稱滯環(huán)的繼電環(huán)節(jié)
在確定選用滯環(huán)繼電環(huán)節(jié)后,就需要確定其的兩個(gè)參數(shù):滯環(huán)寬度ε和繼電幅值u。在繼電自整定法中,滯環(huán)寬度ε的大小將影響等幅振蕩的幅值和頻率,從而對(duì)PID控制器參數(shù)的整定產(chǎn)生重要的影響。同時(shí),滯環(huán)寬度ε和繼電幅值u之間存在著一種不等式的約束關(guān)系,如果兩者不滿足這種關(guān)系,也會(huì)使整定結(jié)果不理想,甚至造成參數(shù)整定失敗。大量仿真研究表明,滯環(huán)繼電器特性選擇應(yīng)遵循如下原則[4]:
(1)滯環(huán)寬度ε的選定:設(shè)外界干擾噪聲的幅值為Nm,則ε必須大于該噪聲的最大幅值,即ε≥nNm,n=2~10,以保證被控系統(tǒng)實(shí)現(xiàn)穩(wěn)定的等幅振蕩;
3 基于任意相位裕度的PID控制器參數(shù)整定法?
傳統(tǒng)的PM法的繼電滯環(huán)特性中的滯環(huán)寬度ε和期望的相位裕度?m存在一種確定的函數(shù)約束關(guān)系[1,5],一旦給定了確定的相位裕度?m,那么與之相應(yīng)的滯環(huán)寬度ε也就確定了,這極大地限制了繼電特性參數(shù)的合理性和自由性。
鑒于PM法的缺陷,本文采用了一種基于任意相位裕度的PID參數(shù)自整定方法,通過合理地自由地選擇滯環(huán)繼電特性參數(shù),得到更佳的振蕩參數(shù)以及更準(zhǔn)確的臨界信息,從而獲得更優(yōu)的PID控制器參數(shù)。如圖3所示,該方法先通過繼電反饋測試,提取系統(tǒng)的臨界信息,然后通過改變PID參數(shù)值,使Q點(diǎn)移動(dòng)到任意相位裕度的單位圓周上的P點(diǎn)[6],而不僅僅是和單位圓周的交點(diǎn)S,從而提高控制品質(zhì)。
滯環(huán)繼電特性的描述函數(shù)的負(fù)倒數(shù)為:

圖3 基于任意相位裕度的PID參數(shù)自整定

設(shè)被控對(duì)象的傳遞函數(shù)為Gp(s),PID控制器的傳遞函數(shù)為Gc(s)。
測試模式下,由圖3,可得:

其中,wc為被控對(duì)象等幅振蕩的頻率。
控制模式下,系統(tǒng)的開環(huán)傳遞函數(shù)為∶

與此對(duì)應(yīng)的開環(huán)頻率特性為∶
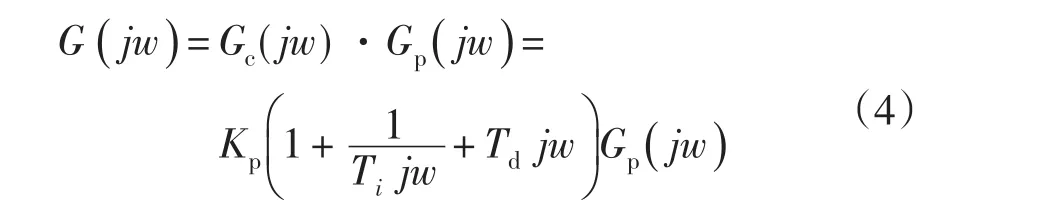
由圖3及式(4)可得

設(shè)任意相位裕度為?m,工業(yè)實(shí)際中相位裕度一般取值為30°~60°,則單位圓周上P點(diǎn)的坐標(biāo)為:

在選定的滯環(huán)繼電環(huán)節(jié)下,由繼電反饋實(shí)驗(yàn),得Q點(diǎn)坐標(biāo)為:

式(2)得


由余弦定理,得

其中ρ為常數(shù),通常取值為2~4。
由式(5)、(8)和(9),得
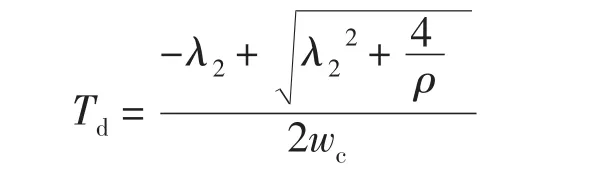
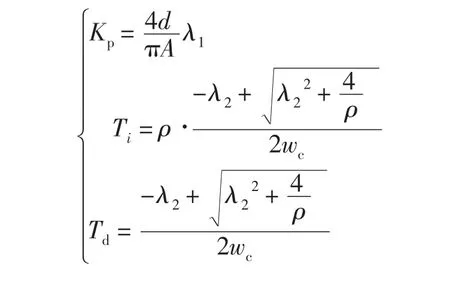
綜上各式,得基于任意相位裕度的PID控制器參數(shù)整定公式為:

4 仿真研究
工業(yè)控制中常用的模型為一階慣性加延遲模型,所以選取被控對(duì)象的傳遞函數(shù)為來進(jìn)行Matlab/Simulinlk仿真實(shí)驗(yàn)。
仿真參數(shù):滯環(huán)繼電特性ε=0.1,d=2;系統(tǒng)參考值y(t)=1,常數(shù) ρ=4。選取期望的相位裕度為50°進(jìn)行PID參數(shù)整定。
測試模式下,求得系統(tǒng)臨界信息為:A= 1.05,wc=14.96。
當(dāng)?m=50°時(shí),利用整定公式,求得:
Kp=1.728 7,Ti=0.056 0,Td=0.014 0。
以此參數(shù)設(shè)計(jì)PID控制器,控制模式下的響應(yīng)曲線如圖4所示。

圖4 PID參數(shù)整定后的系統(tǒng)輸出曲線
由圖4可知,通過繼電反饋實(shí)驗(yàn)進(jìn)行的PID參數(shù)整定后,被控系統(tǒng)的穩(wěn)定性取得了很好的效果。
5 結(jié)束語
基于繼電反饋的PID參數(shù)自整定,不需要系統(tǒng)的先驗(yàn)知識(shí),就可以容易地實(shí)現(xiàn)PID控制器的參數(shù)自整定,并取得良好的控制效果。同時(shí)本文的方法可以基于任意相位裕度進(jìn)行PID參數(shù)整定,一方面使滯環(huán)繼電特性的選擇更加自由,另一方面也提高了PID參數(shù)整定的靈活性,增強(qiáng)了整定方法對(duì)系統(tǒng)的適應(yīng)性。
[1]何芝強(qiáng).PID控制器參數(shù)整定方法[D].杭州:浙江大學(xué),2005.
[2]丁鵬,姚平喜.基于Matlab的無刷直流電機(jī)Fuzzy-PID控制研究及其建模仿真[J].機(jī)電工程技術(shù),2012(2):10-13.
[3]潘帥.基于繼電反饋的PID自整定控制[D].上海:上海大學(xué),2009.
[4]葉嵐.基于繼電反饋的PID控制器的參數(shù)整定[D].上海:上海交通大學(xué),2007.
[5]陳福祥,楊芝雄.PID調(diào)節(jié)器自整定的PM法及其公式推導(dǎo)[J].自動(dòng)化學(xué)報(bào),1993,19(6):736-740.
[6]柴天佑,張貴軍.基于給定的相角裕度和幅值裕度的PID參數(shù)自整定新方法[J].自動(dòng)化學(xué)報(bào),1997,23(2):167-172.
The PID Parameters Self-Turning Based on Relay Feedback
HOU Hong,HAN Zhen-yu
(Sichuan University,Chengdu610065,China)
In view of the drawback of the PID parameter tuning,this paper proposes a PID parameters tuning method based on relay feedback.The method is applied on the basis of relay feedback.,and the flexibility of parameter turning is improved.In the paper,the formula of PID parameters turning based on any phase margin is proposed,and verified by simulink.
relay feedback;PID;parameter turning;phase margin
TP273
A
1009-9492(2014)07-0063-03
10.3969/j.issn.1009-9492.2014.07.019
侯 洪,男,1989年生,四川巴中人,碩士研究生。研究領(lǐng)域:現(xiàn)代控制工程及計(jì)算機(jī)應(yīng)用。
(編輯:向 飛)
2014-01-08
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12