基于MATLAB的電子節(jié)氣門(mén)控制器的建模與仿真*
2014-02-14 02:41:10李岳林廖伯榮謝安平周喆吳勇劉寶杰
小型內(nèi)燃機(jī)與車(chē)輛技術(shù) 2014年6期
關(guān)鍵詞:系統(tǒng)
李岳 林廖 伯榮 謝安平 周喆 吳勇 劉寶杰
(長(zhǎng)沙理工大學(xué)汽車(chē)與機(jī)械工程學(xué)院湖南長(zhǎng)沙410076)
基于MATLAB的電子節(jié)氣門(mén)控制器的建模與仿真*
李岳 林廖 伯榮 謝安平 周喆 吳勇 劉寶杰
(長(zhǎng)沙理工大學(xué)汽車(chē)與機(jī)械工程學(xué)院湖南長(zhǎng)沙410076)
根據(jù)數(shù)學(xué)模型在Matlab/Simulink中建立了電子節(jié)氣門(mén)控制器的仿真模型,分別采用普通PID和模糊PID兩種控制策略實(shí)現(xiàn)了對(duì)節(jié)氣門(mén)的控制仿真,并對(duì)仿真結(jié)果進(jìn)行了比較分析。結(jié)果顯示模糊PID控制具有超調(diào)量小、瞬態(tài)響應(yīng)速度快、性能穩(wěn)定等優(yōu)點(diǎn),并驗(yàn)證了該模型的可行性。
節(jié)氣門(mén)控制器模糊PID步進(jìn)電機(jī)仿真
引言
節(jié)氣門(mén)是汽車(chē)發(fā)動(dòng)機(jī)一個(gè)十分重要的控制部件,隨著汽車(chē)電子技術(shù)的發(fā)展,傳統(tǒng)機(jī)械式節(jié)氣門(mén)逐漸被電子節(jié)氣門(mén)所取代[1]。電子節(jié)氣門(mén)廣泛應(yīng)用于現(xiàn)代汽車(chē)上,其優(yōu)點(diǎn)在于可根據(jù)駕駛員的意愿、油耗、排放需求,能夠快速精準(zhǔn)控制節(jié)氣門(mén)的最佳開(kāi)度[2],實(shí)現(xiàn)發(fā)動(dòng)機(jī)最優(yōu)空燃比控制,發(fā)揮發(fā)動(dòng)機(jī)最佳性能,提高車(chē)輛動(dòng)力性和經(jīng)濟(jì)性,改善駕駛安全性和舒適性[3]。電子節(jié)氣門(mén)具有復(fù)雜、非線性、時(shí)變性等特點(diǎn),實(shí)際中的電子節(jié)氣門(mén)控制還未達(dá)到較優(yōu)效果[4]。國(guó)內(nèi)在電子節(jié)氣門(mén)方面的研究起步較晚,發(fā)展較慢,國(guó)內(nèi)大多數(shù)生產(chǎn)的汽車(chē)采用國(guó)外的電子節(jié)氣門(mén)控制系統(tǒng),因此對(duì)節(jié)氣門(mén)控制器的研究十分必要。
1 電子節(jié)氣門(mén)控制器模型的建立
電子節(jié)氣門(mén)控制器由三相異步電機(jī)模塊、電機(jī)的坐標(biāo)變換模塊、PWM發(fā)生器模塊、逆變器模塊、節(jié)氣門(mén)本體模塊、控制器模塊等組成。Simulink庫(kù)中沒(méi)有步進(jìn)電機(jī)模型,采用基于d-q軸的電壓方程和運(yùn)動(dòng)方程,搭建數(shù)學(xué)模型[5],步進(jìn)電機(jī)模型是建立在三相旋轉(zhuǎn)坐標(biāo)系上的[6],所以逆變器模塊出來(lái)的三相定子電流必須經(jīng)過(guò)CLARK變換與PARK變換轉(zhuǎn)換成轉(zhuǎn)子d-q軸上的電流。電流環(huán)采用普通PID和模糊PID控制方式,d-q軸上的經(jīng)過(guò)CLARK逆變換和PARK逆變換轉(zhuǎn)換到三相靜止坐標(biāo)系下,輸出的三相電流信號(hào)波形與鋸齒載波在PWM模塊里進(jìn)行比較,生成六路脈沖信號(hào),輸出給逆變器。利用脈寬調(diào)制技術(shù)(PWM),將要調(diào)制的模擬信號(hào)波形與載波相比較,得到控制器所需要輸出的一系列脈沖控制信號(hào)。逆變器調(diào)節(jié)各相繞組的通電順序,實(shí)現(xiàn)步進(jìn)電機(jī)的三相六拍、三相三拍等基本控制方式,節(jié)氣門(mén)控制器的仿真模型如圖1所示。

圖1 節(jié)氣門(mén)控制器仿真模型
1.1 三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)
三相混合式步進(jìn)電機(jī)由三組對(duì)稱的定子繞組構(gòu)成,依據(jù)基爾霍夫電壓定律可知,各相電壓方程可以表示為:
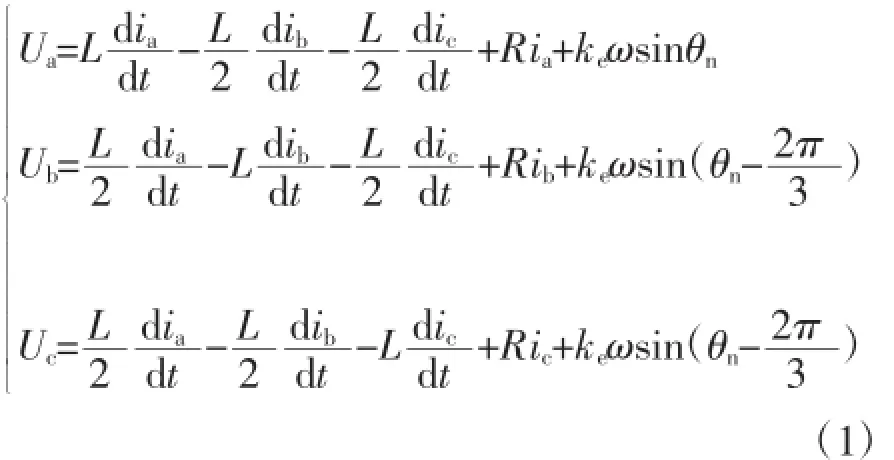
其中:U為加載繞組兩端的電壓;θn為電角度;ω為角速度;R為等效電阻;L為等效電感;ke為反電動(dòng)勢(shì)系數(shù)。
由步進(jìn)電機(jī)的運(yùn)動(dòng)方程,可知:

其中:Te為電磁力矩;B為粘滯摩擦系數(shù);TL為負(fù)載轉(zhuǎn)矩;J為轉(zhuǎn)動(dòng)慣量。
角速度ω與轉(zhuǎn)角θ的關(guān)系:

1.2 節(jié)氣門(mén)彈簧復(fù)位力矩
節(jié)氣門(mén)預(yù)留10%左右的初始位置,是為了確保當(dāng)節(jié)氣門(mén)供電出現(xiàn)故障后,發(fā)動(dòng)機(jī)還能繼續(xù)工作。節(jié)氣門(mén)角度偏離初始位置時(shí),都受到復(fù)位彈簧的反作用力[7]。

其中:Ks為彈簧的扭轉(zhuǎn)剛度;θ1為節(jié)氣門(mén)轉(zhuǎn)角;θ0為節(jié)氣門(mén)處于初始位置時(shí)的轉(zhuǎn)角;Ts0為節(jié)氣門(mén)處于初始位置時(shí)彈簧的預(yù)緊扭矩。
1.3 節(jié)氣門(mén)摩擦阻力矩
克服了庫(kù)倫摩擦阻力矩后節(jié)氣門(mén)才能轉(zhuǎn)動(dòng),且節(jié)氣門(mén)在轉(zhuǎn)動(dòng)過(guò)程中還要克服粘滯摩擦阻力矩,總摩擦阻力矩為:

其中:μd為粘滯摩擦系數(shù);Tf0為庫(kù)倫摩擦力矩。
1.4 節(jié)氣門(mén)運(yùn)動(dòng)學(xué)模型
依據(jù)動(dòng)力學(xué)原理知節(jié)氣門(mén)系統(tǒng)的動(dòng)力學(xué)方程為:
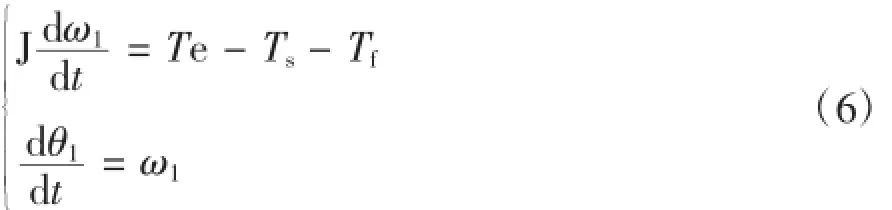
其中:J為節(jié)氣門(mén)軸上的總轉(zhuǎn)動(dòng)慣量;ω1為節(jié)氣門(mén)角速度。
2 電子節(jié)氣門(mén)普通PID控制策略
2.1PID控制原理
PID控制器的結(jié)構(gòu)框圖如圖2所示。系統(tǒng)由模擬PID控制器和被控對(duì)象組成。

圖2PID控制器結(jié)構(gòu)框圖
控制器的輸出和輸入之間的關(guān)系可描述為:

式中:Kp、Ki、Kd分別為比例系數(shù)、積分系數(shù)和微分系數(shù)。
2.2PID控制器參數(shù)對(duì)控制系統(tǒng)性能的影響
1)比例系數(shù)Kp
利于縮短系統(tǒng)的響應(yīng)時(shí)間,提高系統(tǒng)控制精度。若Kp值變大,系統(tǒng)的響應(yīng)速度提高,系統(tǒng)穩(wěn)態(tài)誤差降低,控制精度上升。但Kp值太大,控制系統(tǒng)響應(yīng)過(guò)程將產(chǎn)生超調(diào),并產(chǎn)生振蕩,使系統(tǒng)穩(wěn)定性降低。Kp值太小,調(diào)節(jié)精度下降,響應(yīng)速度遲緩,系統(tǒng)靜態(tài)、動(dòng)態(tài)性能變差。
2)積分系數(shù)Ki
其作用在于降低系統(tǒng)的穩(wěn)態(tài)誤差。若Ki值越大,積分能力越強(qiáng),系統(tǒng)靜態(tài)誤差削弱越快。但Ki值太大,控制系統(tǒng)將產(chǎn)生超調(diào),增多振蕩次數(shù),會(huì)降低系統(tǒng)的穩(wěn)定性能。
3)微分系數(shù)Kd
用于改善系統(tǒng)的動(dòng)態(tài)特性,如降低超調(diào)量,減少調(diào)節(jié)時(shí)間,使穩(wěn)態(tài)誤差降低,提高控制精度。Kd越大,微分作用越強(qiáng),反之則越弱。但Kd值過(guò)大或過(guò)小,系統(tǒng)將增加超調(diào)量和調(diào)節(jié)時(shí)間。
2.3PID參數(shù)的調(diào)定
本文中的電子節(jié)氣門(mén)控制器的執(zhí)行機(jī)構(gòu)是步進(jìn)電機(jī),根據(jù)節(jié)氣門(mén)開(kāi)度的期望值r(t)和實(shí)際值y(t)進(jìn)行比較,構(gòu)成控制偏差e(t)=r(t)-y(t),e(t)、u(t)值分別作為PID輸入量和輸出量,同時(shí),u(t)作為被控對(duì)象的輸入量,從而驅(qū)動(dòng)步進(jìn)電機(jī)。根據(jù)臨界比例度法,首先在MATLAB中Command Window輸入:Ki=0;Kd=0;然后輸入任意值Kp,且不斷調(diào)整其大小。若系統(tǒng)輸出波形增幅振蕩時(shí),減少Kp值;若系統(tǒng)輸出波形減幅振蕩時(shí),增加Kp值,直至出現(xiàn)等幅振蕩曲線。此時(shí)可以得到適當(dāng)?shù)腒p值,即臨界增益值Ku。從等幅振蕩曲線可以讀出曲線兩峰值之間的距離T,即為臨界振蕩周期Tu。最后,根據(jù)表1公式可得Kp,Ki,Kd的值。根據(jù)控制效果不斷調(diào)節(jié)PID控制參數(shù),直至最佳控制效果,本文Kp,Ki,Kd的值分別為0.8,7.5,0.2。

表1 臨界比例度法PID參數(shù)整定公式
3 電子節(jié)氣門(mén)模糊PID控制策略
模糊PID控制器是利用模糊控制實(shí)時(shí)調(diào)整PID控制器的三個(gè)參數(shù)Kp、Ki、Kd的值,使被控對(duì)象具有良好的靜、動(dòng)態(tài)性能。依據(jù)節(jié)氣門(mén)試驗(yàn)的觀察結(jié)果,將定義節(jié)氣門(mén)的位置誤差E和誤差變化率Ec的變化區(qū)間分別為[-0.1,0.1]和[-0.05,0.05];控制量U的變化區(qū)間為[-1,1];設(shè)節(jié)氣門(mén)的位置誤差E、誤差變化率Ec及控制量所取得模糊子集的論域都為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6];量化因子Ke=60,Kec=120,Ku=1/6;ΔKp、ΔKi、ΔKd模糊規(guī)則如表2所示。此模塊的輸入為參考轉(zhuǎn)速與實(shí)際轉(zhuǎn)速差,輸出為參考電流,如圖3所示。
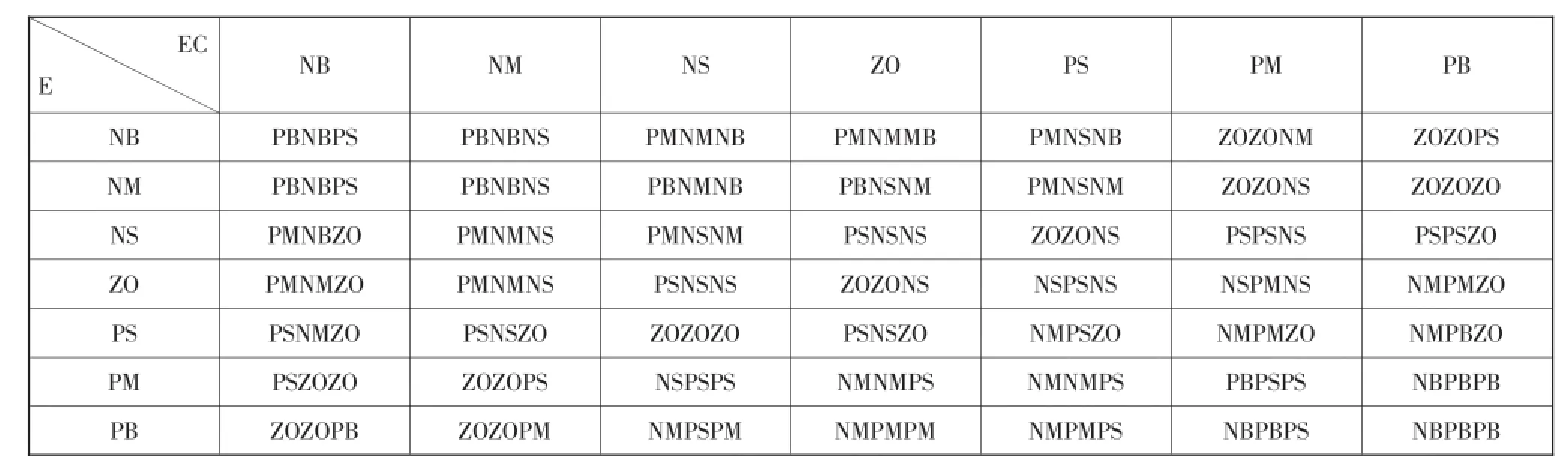
表2 ΔKp、ΔKi、ΔKd的模糊控制規(guī)則

圖3 模糊PID控制模塊
4 仿真結(jié)果分析
4.1 節(jié)氣門(mén)由小開(kāi)度向大開(kāi)度階躍
節(jié)氣門(mén)從小開(kāi)度向大開(kāi)度變化時(shí),節(jié)氣門(mén)開(kāi)度變化范圍為9%~88%,如圖4所示。當(dāng)節(jié)氣門(mén)開(kāi)度由10%階躍到90%時(shí),PID與模糊PID兩種控制方式的上升時(shí)間幾乎相同,約為0.12s,模糊PID控制方式超調(diào)量很小,為1%;而普通PID超調(diào)量很大,為4.5%。這是因?yàn)椴捎媚:齈ID控制方式時(shí),積分作用隨著系統(tǒng)偏差的變化成反方向變化,即:偏差減少時(shí),積分作用加強(qiáng);偏差增大時(shí),積分作用減弱,便能保證系統(tǒng)超調(diào)量限制在一定范圍內(nèi)。
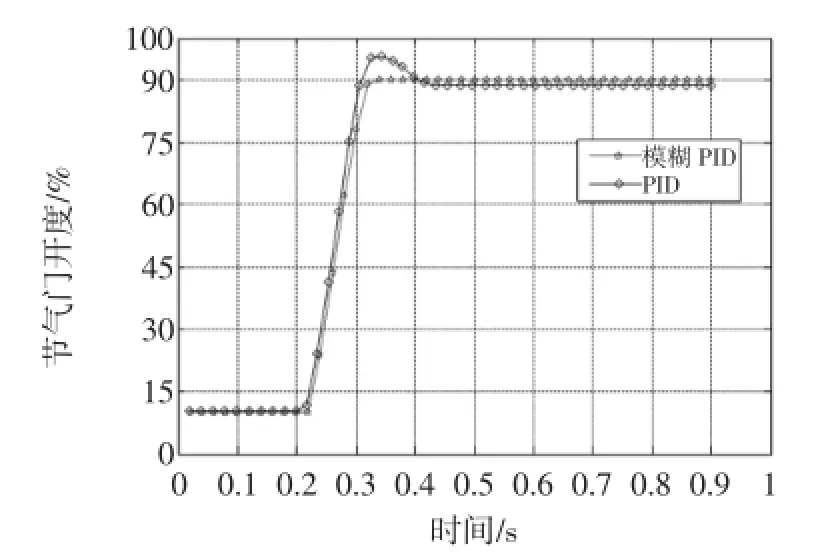
圖4 節(jié)氣門(mén)開(kāi)度由10%到90%的階躍響應(yīng)曲線
節(jié)氣門(mén)開(kāi)度由10%到45%的階躍響應(yīng)曲線如圖5所示。當(dāng)節(jié)氣門(mén)開(kāi)度由10%階躍到45%,采用模糊PID控制方式時(shí),上升時(shí)間為0.09s,而普通的PID控制方式上升時(shí)間稍短,為0.06s。這是因?yàn)槠胀≒ID控制方式能把較大的偏差計(jì)入積分項(xiàng),積分能力加強(qiáng),從而縮短了上升時(shí)間,但引起了較大的超調(diào)量。普通PID超調(diào)量為14%,而模糊PID控制基本沒(méi)有超調(diào),且系統(tǒng)很快達(dá)到穩(wěn)定狀態(tài)。

圖5 節(jié)氣門(mén)開(kāi)度由10%到45%的階躍響應(yīng)曲線
節(jié)氣門(mén)開(kāi)度由45%到90%的階躍響應(yīng)曲線如圖6所示。節(jié)氣門(mén)開(kāi)度開(kāi)始由10%階躍到45%,當(dāng)系統(tǒng)達(dá)到穩(wěn)定狀態(tài)時(shí),節(jié)氣門(mén)開(kāi)度又從45%階躍到90%。模糊PID控制方式的超調(diào)量、穩(wěn)定時(shí)間等都低于普通的PID控制方式。

圖6 節(jié)氣門(mén)開(kāi)度由45%到90%的階躍響應(yīng)曲線
4.2 節(jié)氣門(mén)由大開(kāi)度向小開(kāi)度階落
如圖7所示,首先節(jié)氣門(mén)開(kāi)度由10%階躍到90%。當(dāng)系統(tǒng)達(dá)到穩(wěn)定后,節(jié)氣門(mén)開(kāi)度又從90%階落到15%。若采用模糊PID控制方式,節(jié)氣門(mén)開(kāi)度急劇下降,歷經(jīng)0.09s可到最小開(kāi)度;而普通PID控制需要0.25s才能接近最小開(kāi)度,并且這兩種控制方式都有很大的超調(diào)量。由于模糊PID控制采用可逆PWM驅(qū)動(dòng)方式,當(dāng)節(jié)氣門(mén)開(kāi)度減小時(shí),控制量急劇下降。當(dāng)控制量小于0時(shí),改變步進(jìn)電機(jī)的電流方向,電機(jī)反轉(zhuǎn),電機(jī)驅(qū)動(dòng)扭矩與復(fù)位彈簧的復(fù)位方向相同,從而能迅速減小節(jié)氣門(mén)的開(kāi)度。節(jié)氣門(mén)開(kāi)度增加和減小時(shí)受力情況不一樣,控制量也相異,因而超調(diào)量的大小還取決于節(jié)氣門(mén)開(kāi)度是增加還是減小,前者超調(diào)量小于后者。

圖7 節(jié)氣門(mén)開(kāi)度由90%到15%的階落響應(yīng)曲線
普通PID控制方式,由于步進(jìn)電機(jī)的磁滯,不能快速轉(zhuǎn)變扭矩方向。當(dāng)節(jié)氣門(mén)開(kāi)度突然下降時(shí),控制量減小,復(fù)位彈簧需克服電機(jī)正向扭矩,因此滯后時(shí)間延長(zhǎng)。
圖8為節(jié)氣門(mén)開(kāi)度由90%到45%的階落響應(yīng)曲線。圖9為節(jié)氣門(mén)開(kāi)度由45%到15%的階落響應(yīng)曲線。普通PID控制方式比模糊PID控制方式的滯后時(shí)間長(zhǎng),原因同上所述。
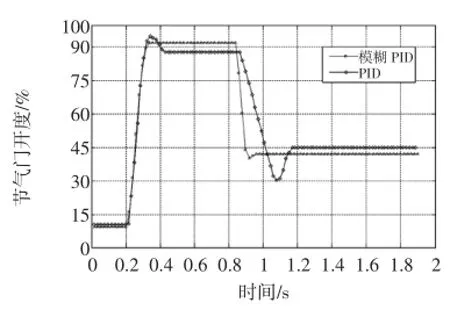
圖8 節(jié)氣門(mén)開(kāi)度由90%到45%的階落響應(yīng)曲線

圖9 節(jié)氣門(mén)開(kāi)度由45%到15%的階落響應(yīng)曲線
5 結(jié)論
本文針對(duì)節(jié)氣門(mén)系統(tǒng)在Simulink中建立了節(jié)氣門(mén)控制器仿真模型,分別采用普通PID和模糊PID兩種控制策略進(jìn)行階躍響應(yīng)仿真。從仿真結(jié)果可以得出,模糊PID相對(duì)普通PID控制具有較小的超調(diào)量和調(diào)節(jié)時(shí)間,瞬態(tài)誤差較小,滯后時(shí)間短,響應(yīng)速度快。由于模糊PID控制算法考慮了節(jié)氣門(mén)系統(tǒng)的動(dòng)態(tài)特性,可以不依賴系統(tǒng)的準(zhǔn)確的數(shù)學(xué)模型。同時(shí)也充分顯示了Matlab/Simulink直觀、方便的特點(diǎn)。
1郭孔輝,付皓,丁海濤.汽車(chē)電子節(jié)氣門(mén)控制器開(kāi)發(fā)[J].科學(xué)技術(shù)與工程,2008,8(1):446~450
2張金柱,張毅,韓玉敏.汽車(chē)電子節(jié)氣門(mén)控制器仿真設(shè)計(jì)[J].黑龍江工程學(xué)院學(xué)報(bào)(自然科學(xué)版),2006,20(1):60~63
3孫亮亮.汽車(chē)發(fā)動(dòng)機(jī)電子節(jié)氣門(mén)控制系統(tǒng)建模與仿真[D].哈爾濱:哈爾濱工業(yè)大學(xué),2008
4嚴(yán)浩銘,孫仁云,張晟愷,等.基于非線性優(yōu)化PID的電子節(jié)氣門(mén)控制系統(tǒng)仿真分析[J].湖北汽車(chē)工業(yè)學(xué)院學(xué)報(bào),2013,27(2):66~69
5李自成.感應(yīng)電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)的研究[D].武漢:華中科技大學(xué),2005
6陳強(qiáng).三相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)研究[D].武漢:華中科技大學(xué),2007
7李儒龍,陳衛(wèi)方,張凡武,等.基于Simulink的電子節(jié)氣門(mén)控制策略開(kāi)發(fā)[J].汽車(chē)科技,2011(6):14~17
Modeling and Simulation of Electronic Throttle Controller Based on Matlab
Li Yuelin,Liao Borong,Xie Anping,Zhou Zhe,Wu Yong,Liu Baojie
School of Automobile and Mechanical Engineering,Changsha University of Science&Technology(Changsha,Hunan,410076,China)
Simulation model of electronic throttle controller is established in the Matlab/Simulink according to the mathematical model,and both ordinary PID and fuzzy PID control strategy are respectively used to achieve the throttle control simulation.Results of the simulation are compared and analyzed,which show that the fuzzy PID control is of less overshoot,fast transient response,stable performance.The feasibility of the model is verified.
Throttle controller,F(xiàn)uzzy PID,Stepper motor,Simulation
TK411+.3
A
2095-8234(2014)06-0039-05
2014-09-19)
國(guó)家自然科學(xué)基金項(xiàng)目(項(xiàng)目批準(zhǔn)號(hào):51176014)。
李岳林(1963—),男,教授、博士生導(dǎo)師,主要從事汽車(chē)節(jié)能減排與新能源技術(shù)等研究。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
