變結(jié)構(gòu)球形機(jī)器人系統(tǒng)設(shè)計(jì)
2014-02-22 02:43:10孫章軍顏景龍李玉玨李桂斌
電子測試 2014年22期
關(guān)鍵詞:結(jié)構(gòu)系統(tǒng)
孫章軍,顏景龍,,李玉玨,李桂斌,邸 超
(1.北京理工大學(xué)機(jī)電學(xué)院,北京100081;2.中國兵器工業(yè)導(dǎo)航與控制技術(shù)研究所,北京,100089)
變結(jié)構(gòu)球形機(jī)器人系統(tǒng)設(shè)計(jì)
孫章軍1,顏景龍1,2,李玉玨2,李桂斌2,邸 超2
(1.北京理工大學(xué)機(jī)電學(xué)院,北京100081;2.中國兵器工業(yè)導(dǎo)航與控制技術(shù)研究所,北京,100089)
本文針對(duì)一種具有球態(tài)、渦扇輪態(tài)和輪態(tài)三種基本運(yùn)動(dòng)形態(tài)的變結(jié)構(gòu)機(jī)器人進(jìn)行了系統(tǒng)研究,從機(jī)器人機(jī)構(gòu)原理、信息感知、控制系統(tǒng)三個(gè)方面進(jìn)行了深入分析,研制了一種具備自主偵察能力的變結(jié)構(gòu)球形機(jī)器人模型,并給出了基于該模型機(jī)器人的實(shí)驗(yàn)分析。實(shí)驗(yàn)表明:該機(jī)器人系統(tǒng)方案可行,機(jī)器人具有防護(hù)性好,機(jī)動(dòng)性好等特點(diǎn),并有一定的偵察能力,適用于機(jī)密偵察及軍用監(jiān)控領(lǐng)域。
變結(jié)構(gòu)機(jī)器人;偵察;控制系統(tǒng)
0 引言
機(jī)密偵察和監(jiān)控在軍用和公共安全等領(lǐng)域得到了越來越廣泛的應(yīng)用,這使得微小型自主移動(dòng)機(jī)器人成為研究熱點(diǎn)。羅自容等設(shè)計(jì)了一種可拋擲多運(yùn)動(dòng)態(tài)機(jī)器人。周偉等設(shè)計(jì)了一種帶有2個(gè)自由度手臂的小型兩輪機(jī)器人。美國明尼蘇達(dá)大學(xué)的Hougen D.F.等研制了一系列用于偵察的“Scout”機(jī)器人。上述應(yīng)用環(huán)境中,需要機(jī)器人秘密進(jìn)入并隱藏在危險(xiǎn)或空間受限場所,把偵察信息傳輸?shù)奖O(jiān)控后臺(tái)。變結(jié)構(gòu)球形機(jī)器人具備重量輕、體積小、能耗低、實(shí)時(shí)性好、能適應(yīng)復(fù)雜地形環(huán)境等特點(diǎn),是解決前述需求的典型方案。鑒于此,本文提出一種變結(jié)構(gòu)球形機(jī)器人系統(tǒng)方案,機(jī)器人系統(tǒng)由移動(dòng)平臺(tái)、人機(jī)交互系統(tǒng)、機(jī)器人車載控制系統(tǒng)和傳感檢測系統(tǒng)四大部分組成。
1 機(jī)器人結(jié)構(gòu)
1.1 移動(dòng)平臺(tái)工作原理
機(jī)器人移動(dòng)平臺(tái)由變形組合輪、平衡輪、輪驅(qū)動(dòng)機(jī)構(gòu)、運(yùn)動(dòng)態(tài)轉(zhuǎn)換機(jī)構(gòu)組成,通過運(yùn)動(dòng)轉(zhuǎn)換機(jī)構(gòu)、平衡輪實(shí)現(xiàn)運(yùn)動(dòng)方式的轉(zhuǎn)換,呈現(xiàn)球態(tài)、渦扇輪態(tài)和輪態(tài)三種基本運(yùn)動(dòng)狀態(tài),能夠適應(yīng)復(fù)雜的地形,機(jī)器人的三維模型如圖1所示。
當(dāng)機(jī)器人呈球態(tài)時(shí),球殼對(duì)內(nèi)部零件起到防護(hù)作用,可以通過拋擲等方式布置到目標(biāo)探測區(qū)域。當(dāng)機(jī)器人呈渦扇輪態(tài)時(shí),相對(duì)于球形運(yùn)動(dòng)態(tài)可以提供更大的驅(qū)動(dòng)力,可以實(shí)現(xiàn)機(jī)器人的全向運(yùn)動(dòng)和轉(zhuǎn)向,機(jī)器人內(nèi)部的探測裝置(如視頻、測距傳感器等)顯露出來完成探測任務(wù)。當(dāng)機(jī)器人呈輪態(tài)時(shí),兩個(gè)輪之間的間距變大,增加了機(jī)器人的運(yùn)動(dòng)穩(wěn)定性。
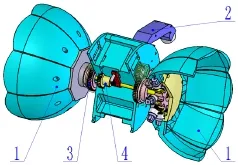
圖1 變結(jié)構(gòu)球形機(jī)器人3D模型
1.2 機(jī)器人靜力學(xué)分析
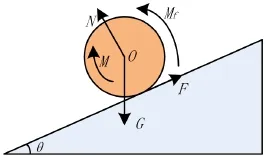
圖2 機(jī)器人爬坡受力分析
根據(jù)靜力學(xué)平衡條件,可得如下平衡方程:
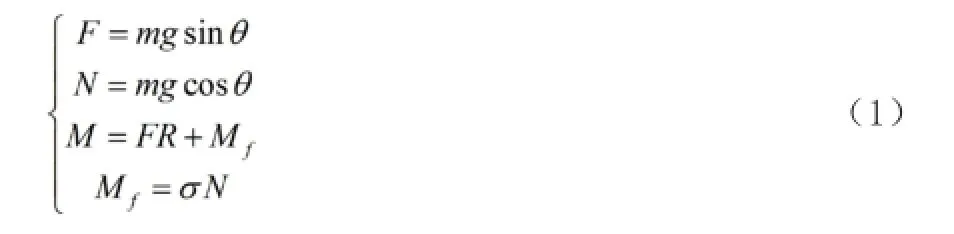
其中:
F:地面對(duì)輪的切向反作用力;
m:機(jī)器人總質(zhì)量為2.5Kg;
N:地面對(duì)輪的法向反作用力;
M:作用于輪的驅(qū)動(dòng)力矩;
R:機(jī)器人輪子半徑,80mm;
公式(1)可以簡化為:

依據(jù)上述計(jì)算,可以確定驅(qū)動(dòng)電機(jī)和變形電機(jī)的型號(hào),在本方案中兩種電機(jī)均采用Faulhaber直流電機(jī)(型號(hào)為2232U012SR)和配套的編碼器(型號(hào)為IE2-512)。
2 機(jī)器人控制系統(tǒng)功能要求
首先機(jī)器人的體積小,要求控制系統(tǒng)尺寸小、重量輕、功耗低,能集成在機(jī)器人本體內(nèi)。其次,機(jī)器人在未知環(huán)境下要實(shí)時(shí)采集信息、處理以及避障等動(dòng)作的規(guī)劃與處理,要求控制系統(tǒng)的實(shí)時(shí)性好。根據(jù)機(jī)器人系統(tǒng)的工作要求,對(duì)機(jī)器人控制系統(tǒng)的總體要求如下:
⑴ 接受上位機(jī)的指令實(shí)現(xiàn)機(jī)器人的運(yùn)動(dòng);
⑵ 實(shí)現(xiàn)機(jī)器人的運(yùn)動(dòng)模式的切換;
⑶ 具有多媒體影音反饋功能;
⑷ 控制系統(tǒng)小型化、輕量化、柔性化;
⑸ 具有獨(dú)立探測能力,即具有自主功能;
⑹ 具有感知自身狀態(tài)和環(huán)境的傳感系統(tǒng)。
3 機(jī)器人控制系統(tǒng)設(shè)計(jì)
機(jī)器人控制系統(tǒng)由人機(jī)交互系統(tǒng)和機(jī)器人車載控制系統(tǒng)構(gòu)成,機(jī)器人控制系統(tǒng)結(jié)構(gòu)如圖3所示。
3.1 人機(jī)交互系統(tǒng)
人機(jī)交互系統(tǒng)采用一個(gè)筆記本電腦作為控制終端,人機(jī)界面采用LabView設(shè)計(jì),該界面可以實(shí)現(xiàn)偵察視頻顯示,運(yùn)動(dòng)方式指令控制、運(yùn)動(dòng)態(tài)模式指令控制、機(jī)器人狀態(tài)顯示等功能。操作人員可以方便地使用鍵盤和鼠標(biāo)對(duì)機(jī)器人進(jìn)行控制。
筆記本電腦采用USB轉(zhuǎn)串口連接Zigbee模塊和USB數(shù)據(jù)采集卡連接音視頻接收器分別同機(jī)器人進(jìn)行數(shù)據(jù)通信和音視頻傳輸。Zigbee模塊通過USB與控制程序進(jìn)行數(shù)據(jù)交換,將控制程序發(fā)出的控制指令用無線信號(hào)發(fā)送出去,并將接收到的答復(fù)信息傳遞給控制程序。音視頻接收器主要完成音視頻偵察信號(hào)的接收,經(jīng)過一個(gè)USB音視頻采集卡把接收到的音視頻信息在計(jì)算機(jī)上處理和顯示。
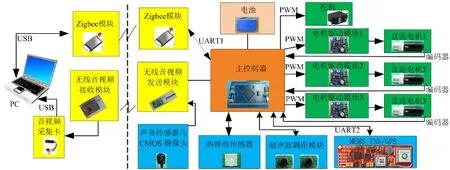
圖3 機(jī)器人控制系統(tǒng)結(jié)構(gòu)圖
3.2 機(jī)器人車載控制系統(tǒng)
車載控制系統(tǒng)采用ARM以及遙控/自主的控制方式,包括主控制器、驅(qū)動(dòng)系統(tǒng)、通信系統(tǒng)、感知系統(tǒng)、電源等,控制對(duì)象包括3個(gè)直流電機(jī)和1個(gè)伺服舵機(jī):一個(gè)電機(jī)用于運(yùn)動(dòng)轉(zhuǎn)換機(jī)構(gòu)、另兩個(gè)電機(jī)用于2個(gè)輪驅(qū)動(dòng)機(jī)構(gòu), 伺服舵機(jī)用于平衡腿的伸展運(yùn)動(dòng)。
3.2.1 主控制器
受機(jī)器人的體積限制,本文以STM32處理器作為機(jī)器人主控制器的主芯片。主要任務(wù)包括:通過串口利用Zigbee模塊接收操作指令同時(shí)回傳機(jī)器人狀態(tài)信息;檢測運(yùn)動(dòng)轉(zhuǎn)換機(jī)構(gòu)的位置信息;根據(jù)操作指令和機(jī)構(gòu)位置產(chǎn)生PWM波控制相應(yīng)的電機(jī)動(dòng)作;根據(jù)操作指令產(chǎn)生平衡腿舵機(jī)所需的控制信號(hào);通過感知系統(tǒng)獲取外部信息;電源電壓檢測,并在過低或異常時(shí)控制保護(hù)電路動(dòng)作。
3.2.2 驅(qū)動(dòng)系統(tǒng)
在直流電機(jī)驅(qū)動(dòng)方面,為便于電機(jī)調(diào)速并提高驅(qū)動(dòng)效率,采用PWM+H橋方式驅(qū)動(dòng),可以方便地實(shí)現(xiàn)電機(jī)的啟停、調(diào)速、正反轉(zhuǎn)。把STM32的通用定時(shí)器TM2-4配置成編碼器接口模式,獲取三個(gè)電機(jī)的位置和速度信息。利用STM32的高級(jí)定時(shí)器TIM產(chǎn)生四路PWM來控制電機(jī)驅(qū)動(dòng)器,通過改變定時(shí)器的比較寄存器值改變占空比,最終改變電機(jī)轉(zhuǎn)速。
3.2.3 無線通信系統(tǒng)
主控制器通過串口連接Zigbee模塊同上位機(jī)進(jìn)行數(shù)據(jù)通信,接收上位機(jī)發(fā)送來的控制指令進(jìn)行相應(yīng)的操作,并將機(jī)器人的狀態(tài)信息發(fā)送出去。
機(jī)器人通過聲音傳感器和CMOS攝像頭所偵察到的音視頻信息,通過音視頻發(fā)送模塊把采集的音視頻信息通過無線發(fā)送出去。為了節(jié)約能源,主控制器根據(jù)上位機(jī)的要求控制音視頻部分的工作與否。
3.2.4 傳感器系統(tǒng)
機(jī)器人為了實(shí)現(xiàn)自主導(dǎo)航,不僅需要知道自身的位置、姿態(tài)、速度以及系統(tǒng)內(nèi)部的狀態(tài),還需要能夠感知周圍的工作環(huán)境。機(jī)器人上安裝了4種傳感器模塊,共有2個(gè)超聲波測距傳感器、1個(gè)熱釋電傳感器、1個(gè)INS/GPS和1個(gè)聲音傳感器和CMOS攝像頭。其中,兩個(gè)超聲波測距傳感器位于車體正前方兩側(cè);熱釋電傳感器安裝在車體正前方;INS/GPS安裝于車體的中心,x軸指向車體的正前方;聲音傳感器和攝像頭位于車體前方。
4 實(shí)驗(yàn)
基于以上分析與設(shè)計(jì),研制的變結(jié)構(gòu)球形機(jī)器人原理樣機(jī)及其實(shí)現(xiàn)的運(yùn)動(dòng)形態(tài)如圖4所示。機(jī)器人重2.5kg,機(jī)器人橫向長度180mm,輪的半徑為80mm,遙控半徑在空曠的地方可以達(dá)到400米。
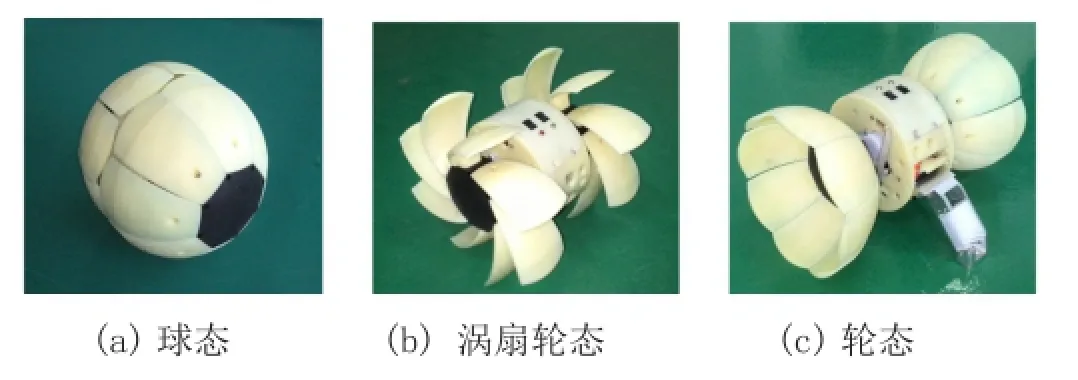
圖4 變結(jié)構(gòu)機(jī)器人樣機(jī)
針對(duì)變結(jié)構(gòu)球形機(jī)器人的特點(diǎn),測試其運(yùn)動(dòng)態(tài)轉(zhuǎn)換性能、移動(dòng)性能。
(1)運(yùn)動(dòng)態(tài)變換實(shí)驗(yàn):機(jī)器人在普通水泥地面、粗糙路面和低草叢地面可順利實(shí)現(xiàn)在三種運(yùn)動(dòng)態(tài)之間變換。
(2)機(jī)器人移動(dòng)性能實(shí)驗(yàn):機(jī)器人呈球態(tài)時(shí)可以原地360°轉(zhuǎn)向;當(dāng)機(jī)器人呈渦扇輪態(tài)時(shí),由于輪為非完整的圓形,運(yùn)動(dòng)時(shí)有跳動(dòng);當(dāng)機(jī)器人呈輪態(tài)時(shí),機(jī)器人運(yùn)動(dòng)平穩(wěn),圖像清晰。在機(jī)器人的人體檢測、避障等自主行為的實(shí)驗(yàn)中,機(jī)器人能夠及時(shí)避開障礙物。
5 結(jié)論
文中提出了一種具有球態(tài)、渦扇輪態(tài)和輪態(tài)三種基本運(yùn)動(dòng)形態(tài)的變結(jié)構(gòu)球形機(jī)器人,并研制樣機(jī)驗(yàn)證了設(shè)計(jì)方案的可行性。在工作環(huán)境下對(duì)機(jī)器人進(jìn)行了運(yùn)動(dòng)態(tài)變換實(shí)驗(yàn)和機(jī)器人移動(dòng)性能實(shí)驗(yàn),實(shí)驗(yàn)表明該機(jī)器人具有投放方便、防護(hù)性好和運(yùn)動(dòng)靈活的特點(diǎn);通過合理配置不同傳感器,該機(jī)器人可以具有較好的自主偵察能力。
[1] 羅自榮,尚建忠,叢楠,等.可拋擲多運(yùn)動(dòng)態(tài)球形機(jī)器人移動(dòng)機(jī)構(gòu)[J].機(jī)械設(shè)計(jì),2009,26(9):30-33.
[2] 周偉,石為人,李江波,等.MSTRbot:一種小型偵察機(jī)器人[J].機(jī)器人,2011,33(5):592-598.
[3] Hougen D F,Benjaafar S, Bonney J C, et a1. A miniature robotic system for reconnaissance and surveillance[C]//Proc of IEEE Int'l Conf on Robotics and Automation. Piscataway, NJ,USA: IEEE, (2000): p501-507.
[4] Sun Z J,Yan J L, LI C Q,et al.Design and Simulation of a Variable Structure Mobile Robot[J].Applied Mechanics and Materials,2014(457-458):672-676.
孫章軍,北京理工大學(xué)機(jī)電學(xué)院博士研究生,主要研究方向?yàn)閭鞲信c機(jī)電控制技術(shù)。
Design of a Variable Structure Spherical Robot
Sun Zhangjun1,Yan Jinglong1,2,Li Yuyu2,Li Guibin2,Di Chao2
(1.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing,100081 2.North Navigation Technology Group Co.,LTD,Beijing,100089)
A variable structure spherical robot with three kinds of basic states:global,turbofan and wheel is developed.Through detailed analysis of the principle of mechanism,information awareness and control system of the robot,the variable structure spherical robot is designed.A series of experiments yield to the proposed scheme of robot with self-protection,good mobility and autonomous reconnaissance capability, which is suitable for secret reconnaissance and military monitoring field.
variable structure robot;reconnaissance;control system
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
