基于地磁與衛(wèi)星組合的高旋彈丸滾轉(zhuǎn)角高頻測量及系統(tǒng)誤差計算研究
2014-02-23 05:24:52曹鵬于紀(jì)言王曉鳴姚文進吳有龍
兵工學(xué)報 2014年6期
關(guān)鍵詞:測量
曹鵬,于紀(jì)言,王曉鳴,姚文進,吳有龍
(南京理工大學(xué) 智能彈藥技術(shù)國防重點學(xué)科實驗室,江蘇 南京210094)
0 引言
彈丸姿態(tài)角的測量是彈道修正彈的關(guān)鍵技術(shù)之一[1]。目前彈丸姿態(tài)角的測量方法有很多,其中包括衛(wèi)星、陀螺、加速度計及磁探測等方法。然而單一的測量模式,都會因自身問題而限制系統(tǒng)的全姿態(tài)角測量及測量精度,例如:衛(wèi)星更新頻率低且不能測量彈丸滾轉(zhuǎn)角;陀螺系統(tǒng)誤差隨時間而累積且不能抗高過載;加速度計無法適用于高動態(tài)環(huán)境;磁探測需要引入一個或兩個外部已知角。衛(wèi)星能提供速度傾角與偏角,并能提供位置信息補償磁測量,而地磁信息能基于此完成滾轉(zhuǎn)角的計算。因此,基于地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角計算將可能成為一種有效姿態(tài)角測量方法。
目前關(guān)于地磁與衛(wèi)星組合測量彈丸姿態(tài)角方案的研究中,楊小軍等[2]與牛春峰等[3]采用卡爾曼濾波方法對彈丸的位置與姿態(tài)參數(shù)進行狀態(tài)估計,但均采用了簡化的彈道模型;史連艷等[4-5]對該方案的可行性及制導(dǎo)精度進行了簡單分析,并在后續(xù)研究中利用擬牛頓法來進行姿態(tài)解算。以上研究均未全局考慮組合測量的系統(tǒng)誤差。裴東興等[6]基于單軸假設(shè),利用地磁計算了彈丸的炮口角速率。針對無法通過實彈及半實物仿真實驗的方法來驗證地磁與衛(wèi)星組合測量彈丸滾轉(zhuǎn)角的可行性及精度問題,本文基于小攻角及單軸旋轉(zhuǎn)假設(shè),建立了地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角及其角速率的計算方法,并推導(dǎo)了該假設(shè)下滾轉(zhuǎn)角及其角速率的系統(tǒng)誤差。通過建立以俯仰角為變量的系統(tǒng)誤差仿真參數(shù)模型,完成全彈道域?qū)崟r變化的彈丸滾轉(zhuǎn)角及其角速率的系統(tǒng)誤差計算,并通過4 個方向的獨立6 自由度(DOF)外彈道仿真,驗證了系統(tǒng)誤差仿真計算的正確性及高頻計算的可行性。
1 地磁與衛(wèi)星組合的姿態(tài)測量原理
1.1 基于地磁的姿態(tài)測量原理
地磁測量單元捷聯(lián)安裝在彈體上,磁傳感器的敏感軸方向與彈體坐標(biāo)系方向一致。在彈丸飛行過程中,通過彈載地磁測量單元實時測量地磁數(shù)據(jù),可以得到地磁與彈體姿態(tài)角的關(guān)系方程為

式中:hnx、hny、hnz為導(dǎo)航系(北東地坐標(biāo)系)下的地磁分量;hbx、hby、hbz為地磁矢量在彈體坐標(biāo)系的投影;ψ、θ、γ 分別為導(dǎo)航系到彈體系按z、y、x 軸順序旋轉(zhuǎn)而得的偏航角、俯仰角和滾轉(zhuǎn)角。
由(1)式可知,對于單一地磁矢量組成的坐標(biāo)轉(zhuǎn)換方程,求解姿態(tài)角時存在無數(shù)解,無法得到唯一解。因此,僅僅依靠地磁測量模塊實時測量彈體坐標(biāo)系下的地磁信息,無法完成姿態(tài)角的解算。
1.2 地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角測量原理
由外彈道知識可知,在彈丸飛行過程中,彈丸穩(wěn)定飛行的上升階段及下降階段,滿足彈丸攻角為小攻角(攻角為αt,αt≈(a2+ b2)0.5)的條件,而在大射角的初始階段與彈道頂部階段,可能出現(xiàn)大攻角[7]。在彈軸與速度坐標(biāo)系下,滿足如下關(guān)系式:

式中:a、b 分別為高低攻角和側(cè)滑角;θV、ψV分別為彈道傾角和彈道偏角。
利用彈載衛(wèi)星設(shè)備,可實時測量彈丸所在位置的經(jīng)度、緯度、高度及速度信息。在速度與導(dǎo)航坐標(biāo)系中,利用衛(wèi)星提供的速度信息,即可得到彈道傾角與彈道偏角,其計算公式如下:

式中:vx為北向速度;vy為東向速度;vz為地向速度。
基于彈丸的小攻角假設(shè)可得,高低攻角和側(cè)滑角a、b 為小量。因此,可以直接利用彈道傾角和偏角θV、ψV代替彈丸的俯仰角和偏航角θ、ψ. 即可認(rèn)為彈道傾角和偏角為帶有測量誤差的俯仰角和偏航角。
已知俯仰角和偏航角,利用(1)式可得彈丸滾轉(zhuǎn)角的計算公式

式中:m 與n 為中間變量,定義為

1.3 組合測量系統(tǒng)誤差模型
由(4)式可得彈丸滾轉(zhuǎn)角的另一種函數(shù)表達形式,如下式:

在利用(5)式計算彈丸的滾轉(zhuǎn)角時,基于小攻角的假設(shè),采用彈道傾角和偏角代替彈丸俯仰角和偏航角,即認(rèn)為彈道傾角和偏角為帶有測量誤差的俯仰角和偏航角。令俯仰角與偏航角的角增量誤差為δθ 與δψ,即

(5)式可以得到滾轉(zhuǎn)角的誤差方程為

從(7)式可以看出,基于小攻角假設(shè)的彈丸滾轉(zhuǎn)角計算誤差,與參考磁分量hnx、hny、hnz、俯仰角θ和偏航角ψ 及其增量誤差δθ、δψ 相關(guān)。
在這一節(jié)中,基于彈丸的小攻角假設(shè),完成了地磁與衛(wèi)星組合計算彈丸滾轉(zhuǎn)角的數(shù)學(xué)推導(dǎo),并推導(dǎo)出該假設(shè)下的系統(tǒng)誤差解析式。
2 組合測量系統(tǒng)的高頻測量
2.1 高旋彈丸的高頻測量原理
對于高速旋轉(zhuǎn)彈丸,在彈丸飛行的全彈道過程中,彈丸的滾轉(zhuǎn)角速率遠(yuǎn)遠(yuǎn)大于俯仰角及偏航角速率即在一個短的時間內(nèi),可以假設(shè)彈丸僅僅只有滾轉(zhuǎn)角的變化,由(1)式整理可得
式中:A 與α 為中間變量,定義為

由(8)式可令滾轉(zhuǎn)平面地磁輸出為

式中:A 為磁測量幅值;f 為磁測量變化頻率;t 為磁測量時間序列;φ 為初始偏移角。
基于單軸旋轉(zhuǎn)假設(shè),由(8)式和(9)式可得其滾轉(zhuǎn)角速率為

2.2 高頻測量誤差模型
由(8)式和(9)式可得,滾轉(zhuǎn)平面的地磁輸出函數(shù)為幅值與周期變化的三角函數(shù),其頻率為

由(11)式可知,基于單軸旋轉(zhuǎn)假設(shè)的滾轉(zhuǎn)角速率計算誤差即為. 令俯仰角與偏航角的角速率分別為與,由(8)式中α 的關(guān)系式可得

式中:

由(12)式和(13)式可以看出,基于單軸旋轉(zhuǎn)假設(shè)的彈丸滾轉(zhuǎn)角速率計算誤差的影響因素包含:參考磁分量hnx、hny、hnz,俯仰角θ 和偏航角ψ 及其角速率
在這一節(jié)中,基于高速旋轉(zhuǎn)彈丸的單軸旋轉(zhuǎn)假設(shè),完成了彈丸滾轉(zhuǎn)平面磁測量頻率變化計算滾轉(zhuǎn)角速率的數(shù)學(xué)推導(dǎo),并推導(dǎo)出了該假設(shè)下的系統(tǒng)誤差解析式。
3 組合測量的系統(tǒng)誤差研究
3.1 系統(tǒng)誤差變量的取值
由6DOF 外彈道理論可知,俯仰角和偏航角增量δθ、δψ 及其角速率誤差的值并非固定,而是隨外彈道飛行階段變化而變化,即:彈丸飛行穩(wěn)定上升階段至彈道頂點,攻角逐漸增大;由彈道頂點至彈丸下降階段,攻角又逐漸減小。彈丸的飛行階段不僅可以用時間描述,還可用俯仰角描述。因此,在研究小攻角及單旋轉(zhuǎn)假設(shè)的系統(tǒng)誤差時,可利用6DOF仿真數(shù)據(jù),建立以俯仰角為變量的誤差變量δθ、δψ及的仿真參數(shù)值。
以南京某地E118.85°、N32.03°地磁場為例,俯仰角及偏航角分別以步長Δ 變化,建立其系統(tǒng)誤差的仿真參數(shù)。其仿真條件如表1 所示,得到誤差變量δθ、δψ 及的值如圖1 和圖2 所示。

表1 系統(tǒng)誤差仿真參數(shù)Tab.1 Simulation parameters of systematic errors
由外彈道知識可知,射角越大其最大攻角也就越大。從圖1 可看出,在55°射角下,俯仰角與偏航角誤差值的取值范圍分別為:- 1° <δθ <1°與-1° <δψ <5°. 從圖2 可看出,高速旋轉(zhuǎn)彈丸的俯仰角及偏航角角速率取值范圍為:-2.5°/s <<0°/s 與-1.0°/s <<0.5°/s,遠(yuǎn)遠(yuǎn)小于滾轉(zhuǎn)角速率(初始角速率約為86 000°/s,落地角速率約為48 000°/s)。

圖1 俯仰角和偏航角誤差參數(shù)Fig.1 Errors of pitch and yaw angles

圖2 俯仰角和偏航角角速率參數(shù)Fig.2 Pitch and yaw angular velocities
3.2 組合測量系統(tǒng)的誤差計算
利用3.1 節(jié)的系統(tǒng)誤差變量值,建立以俯仰角為變量的誤差變量δθ、δψ 及的仿真參數(shù)值,再利用(7)式與(12)式即可完成全射向角區(qū)域(偏航角及偏航角取值見表1)的系統(tǒng)誤差計算,如圖3和圖4 所示。
圖3 為小攻角假設(shè)條件下,組合測量系統(tǒng)在全域范圍內(nèi)的滾轉(zhuǎn)角誤差等值線圖。從圖3 可看出,在小攻角假設(shè)條件下,地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角計算誤差范圍為:絕大部分區(qū)域滿足<±5°. 圖4為單軸旋轉(zhuǎn)假設(shè)條件下,組合測量系統(tǒng)在全域范圍內(nèi)的滾轉(zhuǎn)角速率誤差等值線圖。從圖4 可看出,在單軸旋轉(zhuǎn)假設(shè)條件下,彈丸滾轉(zhuǎn)角速率計算誤差范圍為:絕大部分區(qū)域滿足<±5°/s.

圖3 小攻角假設(shè)下的滾轉(zhuǎn)角系統(tǒng)誤差Fig.3 Systematic errors of roll angle under the assumption of small angle of attack
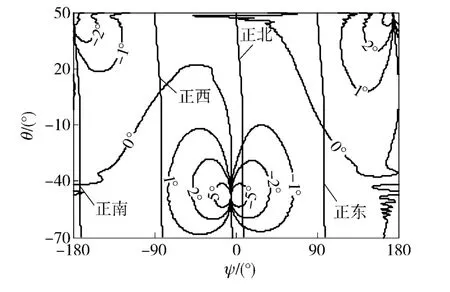
圖4 單軸旋轉(zhuǎn)假設(shè)下的滾轉(zhuǎn)角速率系統(tǒng)誤差Fig.4 Systematic errors of projectile roll angle rate under the assumption of single axial rotation
圖3與圖4 中均有兩個相同的區(qū)域出現(xiàn)較大的誤差,該區(qū)域中心位置為:ψ≈-5°≈D,θ≈-48°≈-I 與ψ≈175°≈D +π,θ≈48°≈I(D 為磁偏角,I為磁傾角)。當(dāng)ψ=D,θ= -I 或ψ=D+π,θ=I 時,即彈軸與地磁矢量在同一直線上時,無法利用地磁信息計算任何角度。而當(dāng)彈軸與地磁矢量有較小的夾角時,即使較小的俯仰角和偏航角誤差及較小的俯仰角和偏航角角速率,也會帶來較大的滾轉(zhuǎn)角及其角速率誤差。因此,在彈軸與地磁矢量有較小的夾角時,小攻角假設(shè)與單軸旋轉(zhuǎn)假設(shè)下的滾轉(zhuǎn)角及其角速率計算誤差較大。排除該區(qū)域后,其整體滾轉(zhuǎn)角誤差小于±5°,角速率誤差小于±5°/s.
4 彈道仿真驗證
為了檢驗在小攻角和單軸旋轉(zhuǎn)假設(shè)下組合的滾轉(zhuǎn)角計算誤差,以某型高旋彈丸為例,進行6DOF 外彈道仿真研究。外彈道仿真分別以正東(ψ =90°)、正南(ψ=180°或-180°)、正西(ψ = -90°)及正北(ψ=0°)4 個射向角發(fā)射,射角均為55°;地磁與衛(wèi)星組合計算滾轉(zhuǎn)角的頻率為10 Hz(假定衛(wèi)星速率數(shù)據(jù)更新頻率為10 Hz);滾轉(zhuǎn)平面的地磁旋轉(zhuǎn)速率輸出頻率為200 Hz(模擬地磁采集頻率最高可以達到5 MHz,即可滿足200 Hz 的計算),計算方法為取該周期內(nèi)的頻率f 的均值。最終滾轉(zhuǎn)角計算誤差仿真結(jié)果如圖5 所示。

圖5 組合滾轉(zhuǎn)角計算誤差Fig.5 Calculated error of combined roll angle
圖5為在小攻角及單軸旋轉(zhuǎn)假設(shè)條件下,組合測量系統(tǒng)頻率為200 Hz 時,組合計算的彈丸滾轉(zhuǎn)角與6DOF 外彈道仿真的差值。比較圖5 與圖3 可知,單次6DOF 仿真的滾轉(zhuǎn)角誤差在全域仿真的滾轉(zhuǎn)角誤差范圍內(nèi)。圖5 中正南與正北方向相比正東與正西方向的滾轉(zhuǎn)角誤差大,對比圖3 可知:正東與正西角度軌跡需穿越彈軸與地磁矢量較小的夾角區(qū)域。圖5 中,正南方向θ =50°附近與正北方向θ =-40°附近的組合滾轉(zhuǎn)角計算誤差的波動較大,對比圖4 可知:該區(qū)域用于高頻計算滾轉(zhuǎn)角的角速率誤差較大。
由上面分析可知,6DOF 外彈道仿真結(jié)果驗證了基于小攻角假設(shè)的組合測量方法以及基于單軸旋轉(zhuǎn)假設(shè)的高頻計算方法的可行性,同時也驗證了建立以俯仰角為變量的系統(tǒng)誤差計算模型的正確性。
5 結(jié)論
利用高速旋轉(zhuǎn)彈丸的外彈道飛行特性,即在中小射角下,滿足小攻角與單軸旋轉(zhuǎn)假設(shè)的特性,建立了地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角及其角速率計算方法。根據(jù)其計算原理,分別推導(dǎo)了地磁與衛(wèi)星組合的彈丸滾轉(zhuǎn)角及其角速度的系統(tǒng)誤差方程。通過6DOF 外彈道仿真驗證,可以得出如下結(jié)論:
1)在中小射角下,排除彈軸與地磁矢量小夾角的區(qū)域時,地磁與衛(wèi)星組合測量的彈丸滾轉(zhuǎn)角系統(tǒng)誤差小于±5°,彈丸滾轉(zhuǎn)角速率的系統(tǒng)誤差小于±5°/s.
2)利用單軸旋轉(zhuǎn)假設(shè),建立了通過測量彈丸滾轉(zhuǎn)平面的地磁旋轉(zhuǎn)速率計算彈丸滾轉(zhuǎn)角的方法,并以此獲得了地磁與衛(wèi)星組合的高頻測量方法。該計算方法具有誤差不隨時間累積的優(yōu)點,滿足彈丸滾轉(zhuǎn)角測量高頻高精度的要求。
3)本文推導(dǎo)的地磁與衛(wèi)星組合測量彈丸滾轉(zhuǎn)角系統(tǒng)誤差的解析式,及建立的以俯仰角為變量的系統(tǒng)誤差參數(shù)的仿真計算方法,能較為準(zhǔn)確地計算全射向角范圍的系統(tǒng)誤差。
References)
[1]岳明凱,曲家惠. 彈道修正彈藥的關(guān)鍵技術(shù)和發(fā)展趨勢[J].飛航導(dǎo)彈,2009,9:25 -28.YUE Ming-kai,QU Jia-hui. The key technologies and trends of trajectory correction ammunition[J]. Aerodynamic Missile Journal,2009,9:25 -28.(in Chinese)
[2]楊小軍,施坤林,汪儀林. 基于磁傳感器/GPS 組合制導(dǎo)飛行彈體的姿態(tài)和位置估計[J]. 兵工學(xué)報,2008,29(2):169 -173.YANG Xiao-jun,SHI Kun-lin,WANG Yi-lin. Estimate of attitude and position of flying projectile controlled by combined guidance based on magnetometer/GPS[J]. Acta Armamentarii,2008,29(2):169 -173. (in Chinese)
[3]牛春峰,劉世平,王中原. 高速旋轉(zhuǎn)彈位置與姿態(tài)測量數(shù)據(jù)分析方法[J]. 火力與指揮控制,2012,37(5):89 -92.NIU Chun-feng,LIU Shi-ping,WANG Zhong-yuan. Estimate of position and attitude of high-speed rotating projectile[J]. Fire Control & Command Control,2012,37(5):89 -92. (in Chinese)
[4]史連艷,楊樹興,張夏慶. MR/GPS 制導(dǎo)在旋轉(zhuǎn)火箭彈中的應(yīng)用分析[J]. 彈箭與制導(dǎo)學(xué)報,2006,26(2):1145 -1147.SHI Lian-yan,YANG Shu-xing,ZHANG Xia-qing. Analyzing of MR/GPS guiding applied in rotating rocket-powered missile[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(2):1145 -1147. (in Chinese)
[5]史連艷,張自賓,宋文淵. 基于MR/GPS 的彈體姿態(tài)解算方法研究[J]. 系統(tǒng)仿真學(xué)報,2010,22(12):2948 -2951.SHI Lian-yan,ZHANG Zi-bin,SONG Wen-yuan. Study of rocket body attitude solving method based on MR/GPS[J]. Journal of System Simulation,2010,22(12):2948 -2951. (in Chinese)
[6]裴東興,王文武,崔春生. 利用轉(zhuǎn)速測試彈丸炮口速度的方法研究[J]. 兵工學(xué)報,2013,34(1):125 -128.PEI Dong-xing,WANG Wen-wu,CUI Chun-sheng. Study on projectile muzzle velocity measurement based on rotational speed[J].Acta Armamentarii,2013,34(1):125 -128. (in Chinese)
[7]Robert L M. Modern exterior ballistics[M]. Atglen:Schiffer Publishing,1999.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00