基于機器視覺與運動控制的軌距尺檢定器自動化檢測技術研究
2014-02-27 08:58:44韋爭亮黃志斌古耀達嚴杰文
中國測試 2014年3期
關鍵詞:區域
韋爭亮,黃志斌,古耀達,嚴杰文
(廣州計量檢測技術研究院,廣東 廣州 510030)
基于機器視覺與運動控制的軌距尺檢定器自動化檢測技術研究
韋爭亮,黃志斌,古耀達,嚴杰文
(廣州計量檢測技術研究院,廣東 廣州 510030)
人工操作軌距尺檢定器繁瑣耗時,通過運動控制與機器視覺兩項技術集成實現檢定器的自動化改造。由數顯卡尺長度標準、鏈式傳動機構及步進電機構成兩個閉環定位子系統,實現軌距及超高參數測點的自動運動控制。在顯示表盤圖像中依據亮度、幾何形狀結構和擬合特征信息識別出各類示值特征及其相互關系實現機器視覺讀數。實驗結果表明:技術集成后可完成各類軌距尺的自動化檢測過程。
軌距尺檢定器;機器視覺;運動控制;自動化改造;示值特征識別
0 引 言
隨著我國高速鐵路和城市軌道交通的迅猛發展,軌道路線的檢測維護需求不斷增加,直接關系著列車的運行安全。國外發達國家大多使用智能化軌道檢測系統,如瑞士PALAS、荷蘭BSM、澳大利亞RAILSCAN等[1],但該類大型自動化軌檢車費用昂貴,使用影響運輸的調度。我國普通鐵路線路的日常檢修仍廣泛采用便攜式可直接測量鐵路線兩股鋼軌間軌距和超高參數的軌距尺,并按照JJG 219-2008《標準軌距鐵路軌距尺檢定規程》[2]的要求,基于國產軌距尺檢定器執行強制檢定來保障其計量性能。目前國內涉及鐵路計量的檢測機構基本使用沈陽鐵路局蘇家屯軌距尺廠、哈爾濱安通測控等專業鐵路計量器具廠家所制造的軌距尺檢定器。該類檢定器在
測量軌距尺時均采用手動機械結構進行多點定位及人工讀數,檢定過程繁瑣耗時。何勝利等[3]改進檢定器部分機械結構,提升了操作簡易性,但仍為人工檢測。文旭等[4]增加了電動控制部分,但并不具備完全的自動檢測功能。
本文通過運動控制和機器視覺技術在原檢定器基體上有效集成實現了設備的自動化檢定功能,提升了軌距尺檢定的水平及效率。
1 自動化改造基本原理及結構
圖1為軌距尺檢定器自動化系統結構框圖,圖2為相應的元部件組合示意圖[2,5]。
整個系統由軌距測量和水平(超高)測量兩部分組成。圖1上半部采用運動控制器、步進電機驅動器、步進電機、傳動機構、數顯卡尺組成兩組閉環運動控制[6]解決方案,分別實現超高及軌距檢定時任意間隔的多點高精度自動定位,對應著圖2(1、2、3、4、5、16)及(11、12、13、14、15、16、17)所組成的定位子系統。圖1下半部由工業攝像機及計算機組成機器視覺模塊,依靠圖像處理技術實現軌距尺測量數值自動讀取。需處理3種示值圖像:對于機械軌距尺軌距測量時需在指示表盤圖像中正確識別指針、刻度線、示值符號等特征,對應圖2中的(7、6、18)組合;超高測量時需在水準器圖像中有效提取水準氣泡并定位刻度值,對應圖2中的(8、9、18)組合;數顯類軌距尺對圖像背景剝離技術要求較低,主要在于提取數字形狀特征并識別。
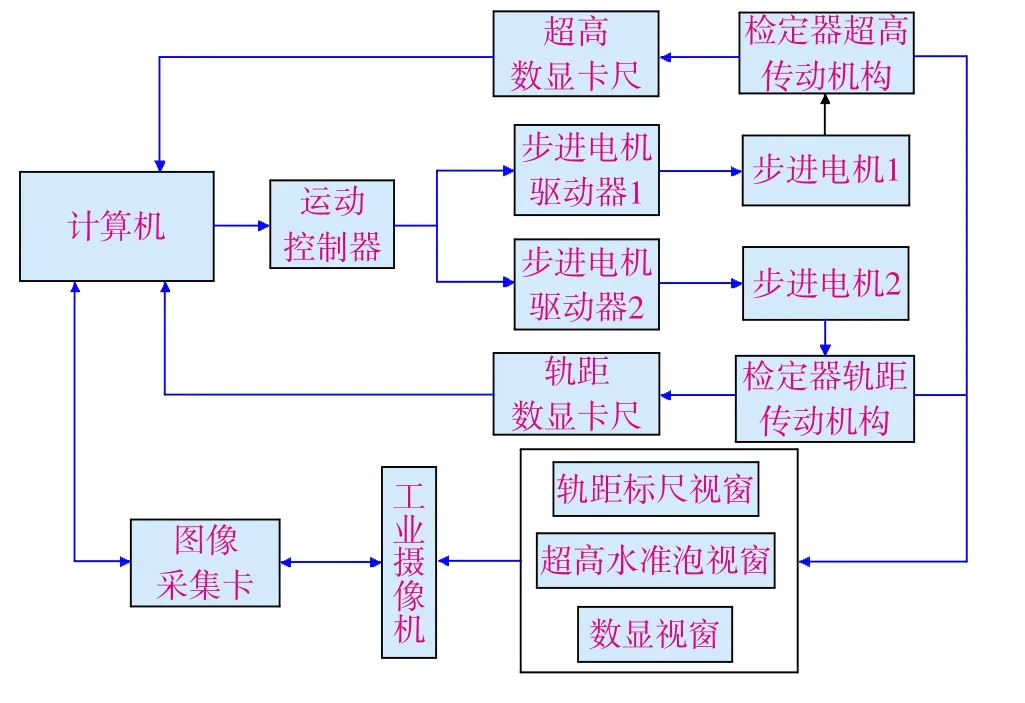
圖1 軌距尺檢定器自動化測量系統結構框圖
2 閉環運動控制方案
分辨率0.01mm的數顯卡尺示值誤差為±0.02mm,遠小于軌距尺水平(超高)示值的最大允差±0.30m,可滿足測量不確定度評定要求,且通過專用接口能與計算機通信,因此選用數顯卡尺作為閉環位移標準。
步進電機是一種將電脈沖信號轉換成機械角位移的執行元件。計算機通過運動控制器輸出高頻率脈沖信號,經由PWM雙極性恒流斬波式驅動器細分步數后促成兩相混合式步進電機轉動。最終選用保持轉矩為1.0(N·m)的電機,通過平穩牢固的鏈式傳動機構可有效帶動數顯卡尺的活動尺身移動[7],位移信號實時反饋回計算機與預設置比較,依據差值符號及大小自適應改變脈沖特性,進而控制電機的轉向及轉速實現精準定位。

圖2 自動化改造后的軌距尺檢定器各部件組合示意圖
3 機器視覺自動讀數
3.1 數顯軌距尺示值圖像處理
該類圖像如圖3(a)所示。由于主體僅為暗色背景上的高亮數學符號,識別難度較小。選取合適閾值二值化圖像(圖3(b)),經腐蝕膨脹操作保障數字區域的隔離及完整,再提取各個獨立連通區域的輪廓并確定最小包圍矩形。若長寬比例處于較方正的區間則視為可能數字區域,如圖3(c)所示。

圖3 數顯表盤圖像初步處理示例
將統計和特征方法優勢聯合進行數字識別[8]。一是提取各個數字子區域分布統計比例參數[9],將數字最小包圍矩形按照從上到下的分布劃分為5個區域,每個區域有效象素數與整體像素數的比值即為其比例參數。二是抽取骨架,采用逐次消去邊界點的迭代細化算法[10],得到數字的單像素連接線條。取出骨架線端點和交叉點(3條以上線段的交點)特征,依據它們在上中下3個區域內的分布數量及結構信息實現數字識別。從圖3(a)可看到軌距及超高示值均為連續5個數字排列。依據高度約束對區域分類,當存在5個同高度連續排列的數字區域組合時,依據分布先驗知識及骨架端點特征識別出“+”“-”號及小數點并據其位置確定數值,最終結果見圖4。
3.2 機械軌距尺超高示值圖像處理

圖4 數顯自動讀數結果
該類圖像如圖5(a)所示。由于示值部件為黑色邊框中的狹長水準器,圖像二值化提取出橫跨圖像中部較亮的長矩形區域作為有效區域(圖5(b)),以排除不必要的干擾和提高處理效率。圖5(c)為尺面局部放大圖像。示值重要特征包括標尺刻線、長度數字和水準泡邊緣及其端點。標尺刻線存在一個不易受光照影響的穩定特征,即其中心像素點位于水平掃描線的亮度低谷,據此可提取出所有可能的刻線中心像素點(圖5(d))。保留細長的連通中心像素點集合視為可能的刻線區域。處于同一高度上數量最多的區域組合視為有效標尺刻線排列。依據刻線高度區分并保留長、中兩組刻線子集合,刻線識別及分組結果如圖5(e)所示。雖然非均勻光照和圖像分辨率限制造成極少數的刻線識別缺失,但已識別刻線信息足夠支持正確讀數。在有效長刻線的底端提取出數字目標矩形,按照“3.1”所述方法識別數字。若連續長刻線識別出的長度值呈現逐次加1的規律,則可基本確定為正確刻線組合。由長刻線的間距及示值差得到圖像像素間距與標尺分度的轉換關系,并基此修正錯誤識別的示值。由中等長度刻線與其最鄰近長刻線的距離推算其相應長度示值,圖5(f)給出了完整標尺刻線及其對應示值的最終識別結果。
水準泡的定位直接關系讀數準確性。相比直接受到刻線干擾的左右邊緣,水準泡上邊緣特征在圖像中更加明確。若某個像素低于其上方像素灰度值一定閾值,則視為可能的水準泡上邊緣點(圖5(g)),具備足夠高度和寬度的連通集合視為水準泡上邊緣的有效區域(圖5(f)的上端矩形框標示)。此后自最高邊緣點開始逐步下移提取出有效的水準泡邊緣點。
用光滑曲線擬合上邊緣數據及其鏡像下邊緣數據,其與刻線中點連線的交點即為水準泡讀數端點。如圖5(g)所示,對四種曲線形式進行最小二乘擬合實驗。1為水準泡最高點之右的上下半邊緣反余弦曲線擬合(式1)結果。2為最小誤差橢圓擬合(式2)結果。3為上下對稱半邊緣開口朝左拋物線擬合(式3)結果,4為上部全體水準泡邊緣開口朝下拋物線擬合(式4)結果。a、b、c為待擬合曲線參數,ymid為刻線中點連線高度坐標,xh、yh為水準泡上邊緣最高點的
水平和高度坐標。經過反復實驗求證,式(1)反余弦曲線擬合結果與實際水準泡形狀最為相符。獲取端點可靠初定位后,可依據周邊邊緣分布進一步精定位水準泡端點。圖5(h)給出了最終讀數結果。

圖5 機械軌距尺超高示值圖像識別過程及結果

3.3 機械軌距尺軌距示值圖像處理

圖6 機械軌距尺軌距示值圖像處理過程及結果
該類圖像如圖6(a)所示。對圖像進行二值化,依據表盤上部高亮白條確定有效示值區域(圖6(b))。刻線可能區域的提取方法與“3.2”超高示值刻線提取類似,但相反的是刻線中心點亮度為其水平掃描
線峰值。在圖像上下部基于同一高度約束確定個體數量最多的刻線區域組合作為有效刻線集,同樣對刻線進行長短分類,上下組有效刻線識別結果見圖6(c)。在識別出的長刻線端部依據表盤示值元素排布先驗知識確定數字符號區域,按照“3.1”數字識別方法確定長刻線長度值,依據刻線間位置關系確定出短刻線對應示值。頂端和底部的單條長中心點豎直連線為指示刻線,由其與最近識別刻線的位置關系確定最終讀數。圖6(d)為刻線示值及指示線識別結果,圖6(e)為讀數結果。
4 自動檢定實驗結果
軟件系統調用了OpenCV[11-12]跨平臺計算機視覺庫。表1為機械和數顯兩類軌距尺軌距示值誤差自動檢定結果。在1391mm位置反復定位5次測量,以量值的最大最小值之差作為重復性。表2為兩類軌距尺超高示值誤差自動檢定結果,重復性是在100mm位置處反復定位測量5次所得。按照JJG 219-2008的要求:軌距示值的最大允許誤差為±0.20mm,示值重復性應小于0.05mm,超高示值的最大允許誤差1級為±0.45mm,示值重復性≤0.15 mm,2級為±1.3 mm,示值重復性≤0.4mm。從實驗結果看到被檢的機械及數顯軌距尺軌距示值誤差均符合要求,兩者的重復性都稍偏大。超高方面機械式軌距尺在50mm處超過了2級超高示值的最大允差要求,其重復性同樣超過2級要求。數顯式軌距尺在150mm超過了1級最大允差要求,但滿足2級要求,重復性滿足1級要求。

表1 軌距尺軌距示值誤差自動檢定結果 單位:mm

表2 軌距尺超高示值誤差自動檢定結果 單位:mm
軌距參數自動檢測耗時30s之內。超高參數自動檢測耗時1min 30s之內。重復性檢測耗時1min之內。
5 結束語
論文通過數顯卡尺長度反饋標準、脈沖序列驅動的步進電機動力元件與鏈式傳動機構的組合實現了軌距及超高參數測量點的閉環自動定位系統。在3類示值圖像中基于灰度和邊緣特征分割出可能特征區域,再依據目標像素集合的形狀結構、統計特性及特征點幾何分布識別出該類示值特征,結合示值表盤先驗讀數規則進一步排除錯誤識別結果,選擇最佳函數擬合關鍵端點,解析各類示值特征的空間位置排列信息,由于綜合運用了多種特征識別信息,保證了正確的示值自動判讀。自動檢定實驗結果表明運動控制和機器視覺技術的集成運用有效提升了軌距尺檢定的可靠性和效率。
[1]劉林.基于FPGA的鐵路軌道檢測技術的研究[D].長沙:中南大學載運工具運用工程學院,2011:1-3.
[2]JJG 219—2008標準軌距鐵路軌距尺檢定規程[S].國家質量監督檢驗檢疫總局,2008.
[3]何勝利,王宜偉,何迥,等.工區用鐵路軌距尺軌距、超高示值標定器:中國,CN201463800U[P].2010.5.12.
[4]文旭,歐毅,陳茂松,等.一種改進的鐵路軌距尺檢定器:中國,CN203148351U[P].2013.8.21.
[5]JJG 404—2008鐵路軌距尺檢定器檢定規程[S].國家質量監督檢驗檢疫總局,2008.
[6]陳蓉.基于數字圖像處理技術的高精度儀表自動檢定系統的研發[D].淄博:山東理工大學機械電子工程系,2008:6-23.
[7]陳秋陽,李光,婁德容,等.鐵路軌距尺檢定器鏈式傳動結構:中國,CN2729637[P].2005.9.28.
[8]Fujisawa H.Forty years of research in character and document recognition-an industrial perspective[J].Pattern Recognition,2008,41(8):2435-2446.
[9]鞏玉濱,楊紅娟,張運楚,等.一種數顯儀表數字符號識別方法研究[J].山東建筑大學學報,2011,26(2):134-137,177.
[10]章毓晉.圖像工程(中冊)[M].北京:清華大學出版社,2005:220-223.
[11]Bradski G,Kaebler A.學習OpenCV[M].于仕琪,劉瑞禎,譯.北京:清華大學出版社,2009.
[12]Pulli K,Baksheev A,Kornyakov K,et al.Real-time computer vision with OpenCV[J].Communications of the ACM,2012,55(6):61-69.
Research on automatic testing technique of calibrator for railway track gage based on machine vision and motion control
WEI Zheng-liang,HUANG Zhi-bin,GU Yao-da,YAN Jie-wen
(Guangzhou Institute of Measuring and Testing Technology,Guangzhou 510030,China)
As manual operation of calibrator for railway track gage is complicated and time consuming,the renovation of calibrator is realized by the technique integration of motion control and machine vision.Two closed-loop-location subsystems constructed by length standard of digital caliper,chain drive mechanism and stepped motor realize automatic motion control of railway track distance and level parameter measurement point.Recognizing all kinds of indication value features and their relations in display dial plate image based on intensity,geometrical shape,structure and fitting feature information realizes machine vision reading.Experimental results prove that the automatic testing process of railway track gage in different type can be completed after technique integration.
calibrator for railway track gage;machine vision;motion control;automatic renovation;recognition of indication value feature
TP216;TB921;TP242.6+2;TN911.7
:A
:1674-5124(2014)03-0023-05
10.11857/j.issn.1674-5124.2014.03.007
2013-11-25;
:2014-01-21
國家質檢總局科技計劃項目(2011QK318)
韋爭亮(1982-),男,廣西河池市人,工程師,博士,主要從事機器視覺及幾何量計量研究。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15