重型越野車輛離合器自動操縱系統的設計
2014-03-01 06:57:36苗成生趙亦農劉海鷗席軍強
兵工學報 2014年11期
苗成生,趙亦農,劉海鷗,席軍強
(北京理工大學 機械與車輛學院,北京100081)
0 引言
實現自動變速操縱是提升重型越野車輛整車信息化、智能化的重要組成部分,自動機械變速器(AMT)是其中的一種實現方式[1]。AMT 的實現主要包括離合器的自動操縱和換擋過程的自動操縱。離合器自動操縱機構及其控制是AMT 的一個技術難點,它影響了重型越野車輛的起步過程和換擋過程的品質。離合器自動操縱機構的設計決定了其控制的可靠性、精度及整體控制的品質。離合器控制不理想會造成車輛乘坐舒適性差,甚至造成離合器的早期或過度磨損,車輛坡道起步溜車等情況[2]。
重型越野車輛上普遍采用干式膜片彈簧離合器及相應的氣助力液壓離合器操縱機構。本文首先分析了離合器的工作特性及其氣助力液壓操縱機構的結構和工作原理,之后針對某重型越野車輛設計了一套基于比例流量閥及操縱油缸為核心的自動離合器操縱系統,并對該操縱系統進行了相關的臺架試驗,進行了分離、接合、定點控制等試驗。
1 離合器工作特性分析
1.1 離合器工作特性
重型越野車輛行駛環境復雜,當其在沙石路面、泥濘路面、冰雪路面或起伏路面上行駛時,會出現起步和換擋次數增多、陡坡起步等較極端情況。為了保證其良好的變速操縱性能,要求離合器除了具備分離迅速徹底、接合快速平順的特點外,還應具有良好的可控性和環境適應性。
圖1為實車采集的優秀駕駛員起步和換擋過程的試驗數據(Lc為離合器行程,ne為發動機轉速,ni為變速箱輸入軸轉速)。分析圖1中曲線,可知離合器有如下工作特性:
1)分離迅速徹底、接合快速平順。換擋過程,中斷動力傳遞,減輕輪齒間沖擊;起步和換擋動力恢復過程,離合器接合過快,會產生較大沖擊,影響舒適性,接合過慢,又會導致摩擦損失[3]。
2)可控特性。為兼顧沖擊度和滑摩損失的影響,對應3 個階段,離合器接合速度分別為“快—慢—快”。需要離合器接合過程可控,即能根據離合器行程實時調整接合速度。對于某些特殊工況,如移庫、慢行、坡起等,離合器還應具備保持特性,將離合器保持在特定位置,滿足車速和扭矩的需求。
3)環境適應性。氣助力液壓操縱系統是一個綜合了機、液、氣多環節的復雜系統,其中一個環節的波動都會影響系統的整體特性。環境溫度對離合器的響應速度和控制精度會產生較大影響。溫度降低,油液運動粘度增大,沿程壓力損失增加,油液運動速度降低,降低離合器的分離和結合速度。
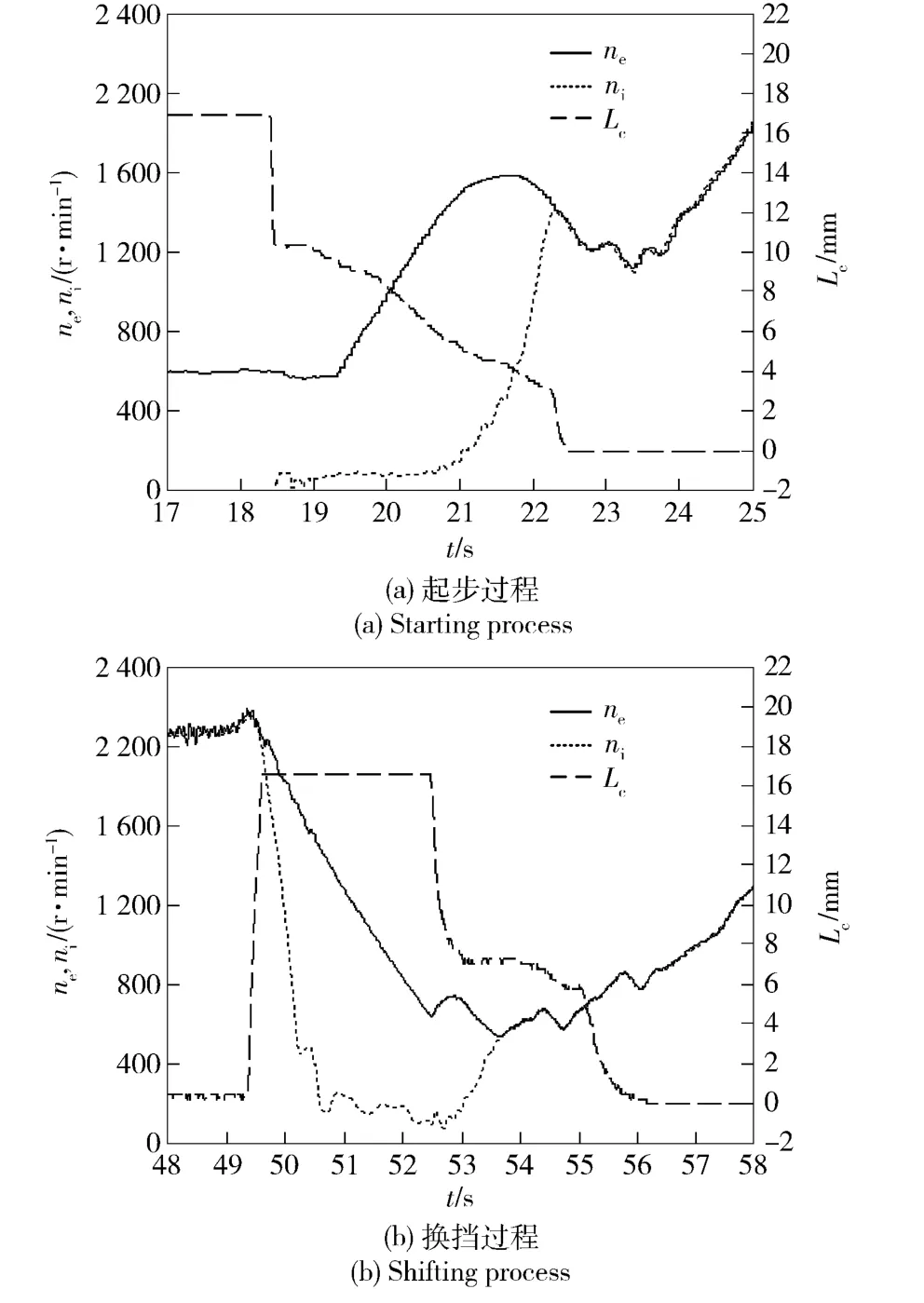
圖1 人工起步和換擋過程試驗曲線Fig.1 Test curves of manually starting and shifting processes
1.2 氣助力液壓操縱機構
重型越野車輛普遍采用離合器氣助力液壓操縱機構對離合器進行控制,其性能穩定、工作可靠[4],結構原理如圖2所示。該機構主要由離合器踏板、液壓主缸、氣助力液壓工作缸、分離撥叉、分離軸承等組成。駕駛員踩離合器踏板,操縱離合器液壓主缸輸出的高壓液體,并作用到氣助力液壓工作缸上,通過隨動閥打開工作缸的氣閥門,使高壓氣體進入氣腔,實現氣壓助力[4-5]。
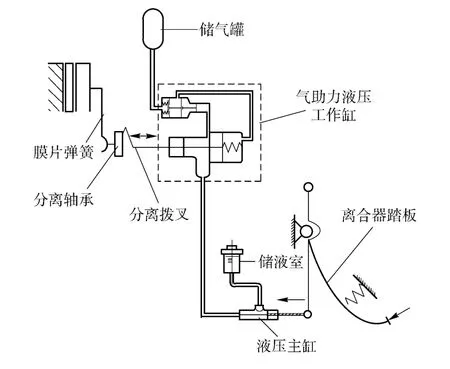
圖2 離合器氣助力液壓操縱機構Fig.2 Clutch booster type hydraulic operating mechanism
2 離合器自動操縱系統設計
2.1 設計要求
以重型越野車輛為研究平臺,在其氣助力液壓操縱機構的基礎上進行改進,實現離合器的自動操縱功能,為實現自動換擋操縱奠定基礎。該車配備的離合器為雙片干式膜片彈簧離合器,針對重型越野車輛的實際使用要求和自動換擋系統的設計要求,對自動離合器操縱系統設計提出以下要求:
1)應能實現離合器的迅速分離、接合平順、接合可控等工作特性要求;
2)實現車輛平穩起步、平順換擋,使車輛具備良好的動力性和舒適性;
3)自動操縱機構控制效果要達到優秀駕駛員的操縱效果,即離合器的分離、接合速度可控,提高系統的響應速度和控制精度;
4)基于該重型越野車輛的特殊使用要求,離合器操縱機構應具備手動應急功能,保留原有的手動操縱功能,提高重型越野車輛的戰場生存能力;
5)所設計的機構應能滿足軍用標準對環境適應性的要求,降低環境溫度對離合器的影響。
2.2 設計方案分析
目前應用的離合器自動操縱機構的形式主要有電控液動、電控氣動、電控電動,其中電控液動式具有響應速度快、控制精度高、環境適應性好、工作可靠等優勢,在重型越野車輛上應用最為廣泛。本設計選用電控液動的設計方案。
基于以上分析及設計要求,本文設計的離合器自動操縱系統的設計方案如圖3所示。在氣助力液壓工作缸和分離撥叉之間增加一套控制機構。該機構由比例流量閥、控制油缸等組成,控制油缸固定于氣助力液壓工作缸上,且兩端均有活塞桿輸出,一端與分離撥叉相連,一端與氣助力液壓工作缸活塞桿接觸連接(如①所示),控制油缸由比例流量閥驅動。氣助力液壓工作缸選用內置有位移傳感器(用于測量離合器位移Lc)和電磁氣閥(原理如②所示)的工作缸,既可以通過控制電磁氣閥的打開來實現氣助力,也可以通過液壓主缸油壓打開助力缸內部的隨動氣閥實現氣助力。其他部分均保留和使用傳統的氣助力操縱方式。
控制油缸直接與分離撥叉相連,自動操縱過程中液壓主缸不參與工作,氣助力液壓工作缸只在快速分離過程中使用,避免了氣壓波動的影響,同時環境溫度對主缸后油路的影響也與自動控制部分剝離,只有自動控制部分液路受溫度的影響,大大降低了外界環境溫度對離合器控制效果的影響,提高了離合器的響應速度和控制精度。
根據運動關系可以獲得如下動力學方程:
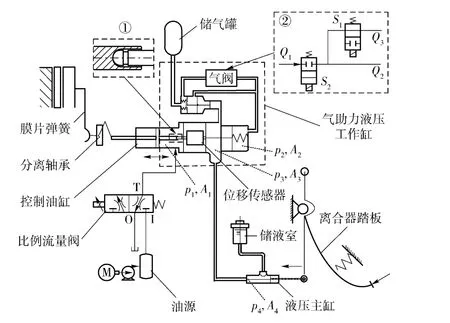
圖3 離合器氣助力自動操縱機構Fig.3 Clutch gas power automatic operating mechanism

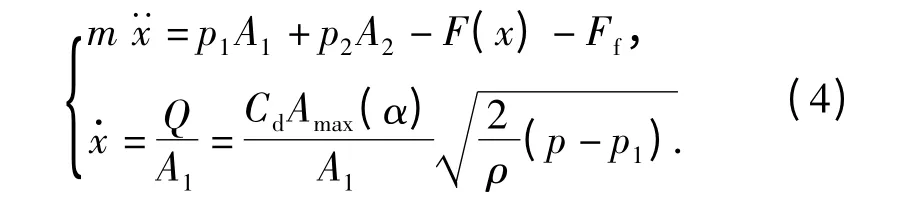
式中:m 為控制油缸活塞質量;x 為控制油缸活塞位移,取分離(向左)為正;F(x)為膜片彈簧彈性作用力;k 為油缸活塞桿到分離軸承的杠桿比;Ff為等效阻力之和;p 為缸內油壓或氣壓;A 為對應的有效作用面積;下標1、2、3、4 分別表示控制油缸內腔、氣助力工作缸油腔、氣腔和液壓主缸油腔;S1、S2表示氣閥;其他參數如圖3所示。
離合器控制油缸由比例流量閥控制,比例閥可以按給定的輸入電流連續地、按比例地控制液流流量的大小[6],其流量特性曲線如圖4所示,電流的大小通過脈沖寬度調制(PWM)進行控制。氣助力液壓工作缸中內置氣閥和位移傳感器:氣閥可以控制氣源的通斷(Q1接高壓氣源,Q2接氣缸,Q3接排氣口),位移傳感器可以實時監測離合器的分離行程。
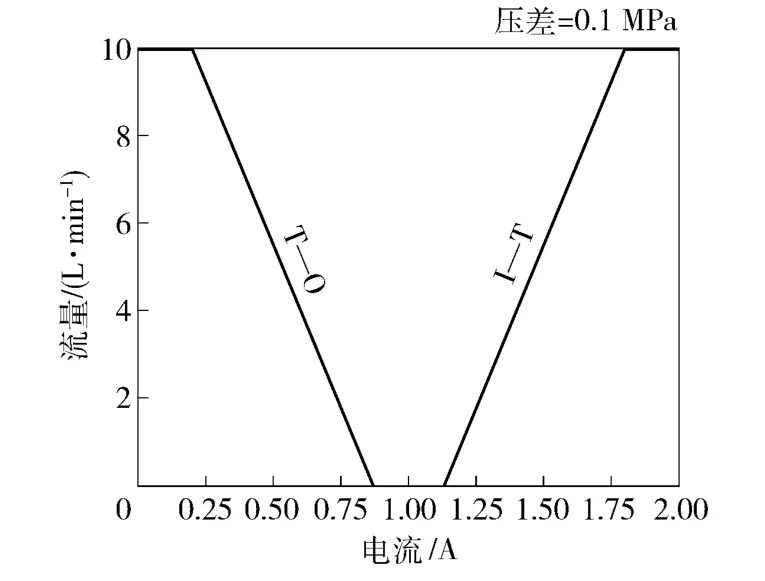
圖4 比例流量閥流量特性曲線Fig.4 Flow characteristic curve of proportional flow valve
根據比例閥的特性,可得控制油缸的流量方程為

式中:α 為占空比大小;A(α)為比例閥開口面積,是α 的函數;Cd為電磁閥導流系數。
離合器的接合、分離速度由控制油缸的流量決定,即

(1)式、(3)式共同構成了自動操縱系統中離合器運動方程。
2.3 工作過程分析
根據離合器工作特性的要求和比例流量閥的特性,通過設置占空比實現離合器的分階段控制。其控制流程如圖5所示,分離過程比例閥和氣閥全開,在液壓和氣助力共同作用下實現最快速度分離;接合過程,由控制油缸單獨操控,根據離合器的位置劃分三階段,通過不同占空比的控制,實現快慢快的接合特性。離合器各工作過程閥的開關狀態真值表如表1所示。
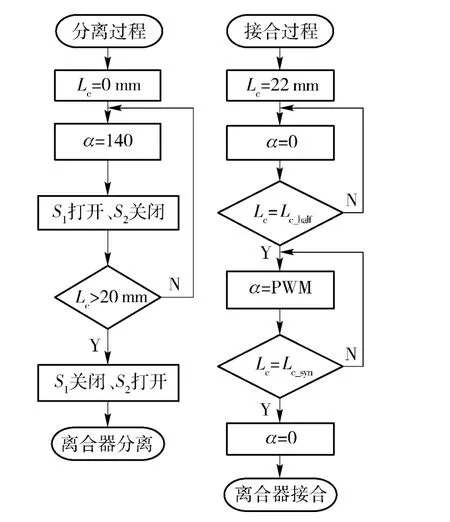
圖5 離合器控制流程Fig.5 The clutch control process
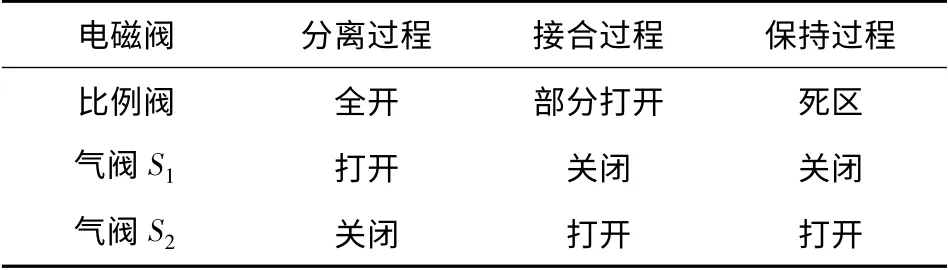
表1 離合器狀態與電磁閥狀態真值表Tab.1 The truth table of clutch and electromagnetic valve states
1)分離過程:同時控制比例閥和氣閥,在控制油缸液壓力和氣助力缸氣壓力的雙重作用下,推動分離撥叉左移,實現離合器的快速分離。該過程中離合器的運動關系為
2)接合過程:氣閥關閉,由比例閥單獨控制。在膜片彈簧回復力的作用下,控制油缸活塞右移,使離合器接合,同時推動助力缸活塞桿右移,使位移傳感器能始終準確反饋液壓缸活塞的位置。
根據(5)式可以得出,接合速度與A(α)、p1成正相關,p0為油箱油壓,p1由F(x)決定,因此可以通過設置占空比α 的大小實時控制比例流量閥的開口大小,滿足不同接合速度的需求。
3)保持過程:某些工況,如慢行、移庫、起步等,需要控制離合器保持在某一特定位置時。通過PWM 控制比例流量閥使其工作在死區位置,即A(αPWM)=0.根據(3)式,離合器的速度x· 為0,實現離合器的保持工況。根據(1)式可以得出此時控制油缸內油壓為

4)應急工作過程:當自動操縱系統出現故障而不能工作時,駕駛員可以通過踩下離合器踏板實現離合器的分離、接合和保持,其運動關系為
式中:F 為踏板力;k1為踏板至主缸的杠桿比;l 為離合器踏板位移量;Δl 為空行程。離合器的運動過程完全由踏板決定,其工作原理與傳統氣助力液壓操縱機構完全相同,在此不再贅述。
2.4 控制油缸的設計與計算
通過上述分析,控制油缸是該自動操縱系統的核心部件,直接影響系統的操縱特性。控制油缸必須滿足以下設計要求:1)結構要求,保證離合器能徹底分離,考慮安裝空間限制,油缸尺寸盡量小;2)載荷要求,由(6)式得出油缸輸出作用力必須能克服彈簧壓緊力;3)分離時間要求,分離時間t ≤0.3 s.
該方案中采用的控制油缸為兩位油缸,其結構簡圖如圖3所示,設計參數主要有油缸行程lo、油缸內徑D、活塞桿直徑d、油缸壁厚h. 內徑D 為最關鍵的尺寸參數,受到載荷、分離時間等條件的共同約束,為此本文采用協同優化(CO)方法對該尺寸進行計算,其他參數如表2所示。

表2 油缸設計已知參數Tab.2 Oil cylinder design parameters
2.4.1 控制油缸CO 模型
CO 方法是一種新型耦合系統的多級優化方法,具有較高的自由度,是目前應用較為廣泛的多學科設計優化方法[7]。根據CO 方法的思想將控制油缸的設計問題分解為2 個層次的優化設計問題:頂層是系統級優化器,以系統目標函數為優化目標,約束條件為各子系統間一致性約束,以來協調各子系統的優化結果;子系統優化器采用系統級設計變量期望值同該子系統優化解的差異作為優化目標函數,約束條件為與本子系統相關的約束。建立控制油缸CO 模型,如圖6所示:系統層為油缸模型,以油缸的體積作為優化目標;子系統層分別為力學模型和動力學模型,分別對應油缸的載荷和時間約束。

圖6 控制油缸CO 模型Fig.6 CO model of controlling oil cylinder
圖6中:F(D)為系統的目標函數;J1、J2是系統級一致性約束,也是子系統的目標函數;D*和D 分別是系統級和子系統級設計變量迭代值;δ 為活塞厚度,采用格來圈和兩個導向帶導向,取為30 mm;p為油壓,取油源最低壓力2.8 MPa;s.t.為約束條件;ε 為松弛量,子系統不一致信息的衡量參數:

式中:λ 為懲罰系數。首先,系統級向子系統級分配設計向量期望值D*,子系統在滿足其自身約束條件的前提下,求取其設計變量與系統級提供給該子系統的目標值之間的差異最小值,并將優化結果D1、D2返回給系統級。系統級根據子系統級返回的設計向量D 構造子系統間一致性不等式約束J1(D)、J2(D),在其約束條件下,求取系統目標函數最小值,并將優化結果D*再次傳給子系統級。經過系統級優化和子系統級優化之間的多次迭代,得到一個最優的系統設計方案。
2.4.2 計算與結果選取
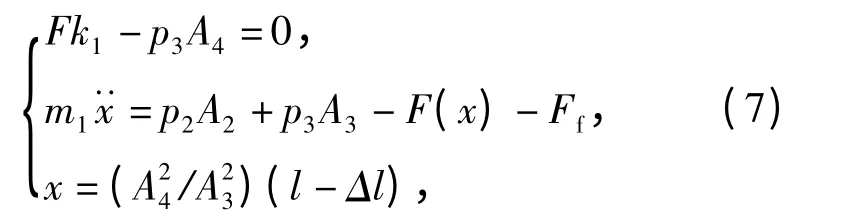
借助多學科設計優化軟件iSIGHT,對液壓控制油缸進行基于經濟性目標的協同優化求解。如圖7所示,利用Optimization 和Matlab 兩種組件建立CO算法模型,sys 和MAT0 模塊為系統級優化模型;sub1 和sub2 模塊分別為子系統力學和動力學模型。
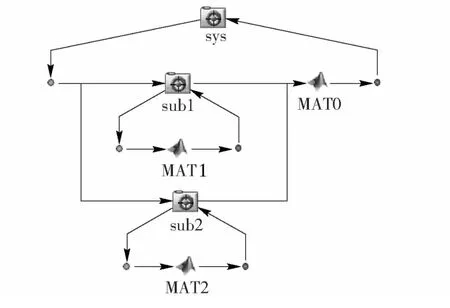
圖7 iSIGHT 環境下的CO 模型計算流程Fig.7 Calculation process of CO model in iSIGHT environment
計算過程需在系統層Optimization 組件中給初始變量值賦值,賦值30. 系統層和子系統層模型優化算法均選擇遺傳算法,計算得D =49.11 mm. 由于液壓缸為標準件,其尺寸參數有標準的取值范圍,根據機械設計手冊[8],選擇油缸內徑D=50 mm.
3 臺架試驗
根據上述設計方案和參數,加工成樣品,進行了臺架試驗,如圖8所示。為了對改進后的離合器操縱系統的操縱特性進行分析,在環境溫度為14℃時,對其進行了臺架分離接合試驗。上位機輸入控制量占空比,并對各閥狀態和離合器位移進行數據采集分析。
圖8 離合器自動操縱系統試驗臺架Fig.8 The clutch automatic control system test platform
3.1 分離特性
離合器分離過程中,系統采用液壓和氣壓雙重驅動,實現快速分離。試驗中采用PWM 對比例閥進行控制,根據實際的需要將占空比數值化,如圖4所示,占空比0 ~140,對應電流0 ~2 A. 圖9為油壓2.8 MPa、氣壓0.6 MPa 時自動操縱方式的分離曲線,橫坐標為時間,縱坐標分別為離合器行程Lc、占空比α、氣閥(開啟為1,關閉為0).
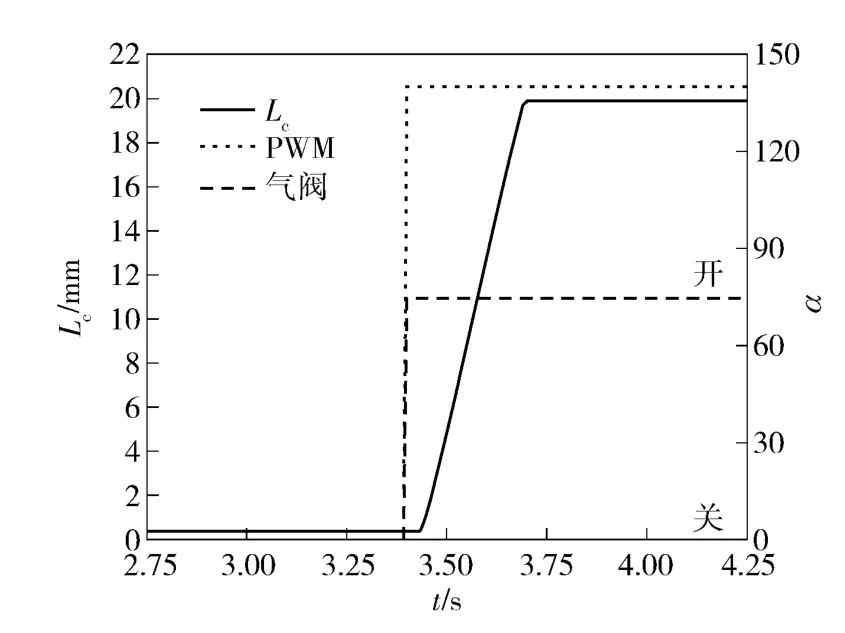
圖9 離合器分離曲線Fig.9 Clutch separation curve
由圖9可得,自動離合器操縱系統的響應時間(指令發出時刻和動作響應時刻之差)為30 ms,分離時間(離合器開始分離至完全分離所用時間)為0.27 s,小于0.3 s,滿足離合器使用過程中快速分離的要求,同時系統的響應時間短,有利于減小離合器分離過程中主從動盤的磨損,縮短換擋時間,提高車輛的動力性。
3.2 接合特性
為了解系統的接合特性,進行了不同占空比控制下的接合試驗,接合曲線如圖10所示,從左至右接合占空比依次增大,分別為0、35、40、45、50、55、60、65. 隨著占空比的增加,接合速度越來越慢,0 占空比時完全接合時間為0.38 s,響應時間為50 ms;當占空比為70 左右時,離合器接合速度幾乎為0,此時離合器處于保持狀態。
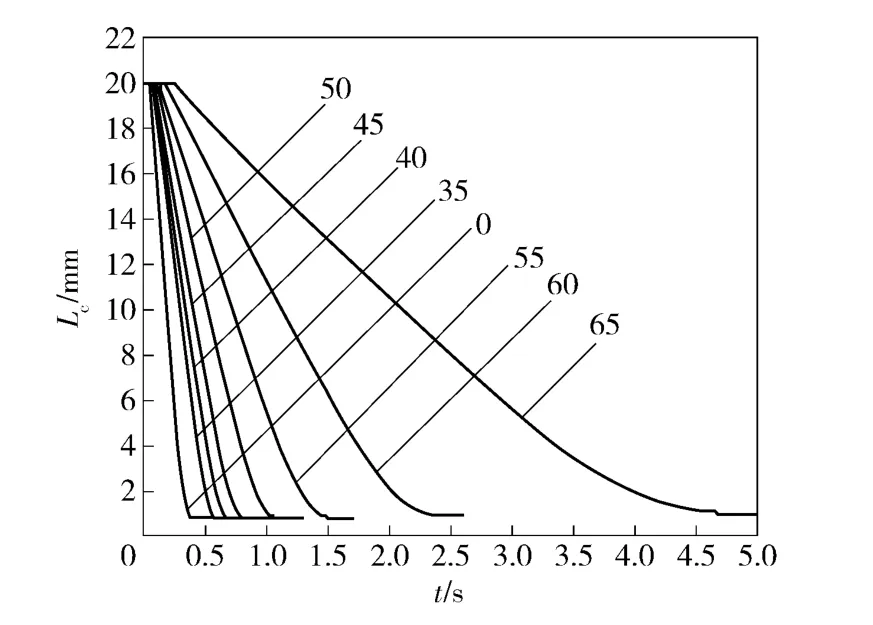
圖10 不同占空比下的接合曲線Fig.10 The joint curves under different duty ratios
該自動操縱系統接合控制不受氣助力缸氣壓的影響,這樣相同溫度、同一占空比下的接合速度基本上就能一致,可以提高系統的整體控制精度。
3.3 定點控制特性
為了確定系統的控制精度,進行了離合器的定點控制試驗。定點控制,指控制離合器停止在任意某個點(或位置)。通過比較離合器當前位置與目標位置的距離,確定不同階段的目標接合速度,然后根據目標接合速度與當前接合速度的比較調整控制占空比,使接合速度趨近于目標速度。圖11所示為定點控制的試驗曲線。
圖11(a)顯示的是某次離合器的定點控制試驗,目標值為7.7 mm. 根據Lc當前位置與目標位置的距離,通過占空比調整離合器的接合速度;當實際位置與目標位置差值在0.1 mm 以內時,發出停止占空比控制離合器停止接合。圖11(b)是某次進行的連續定點控制試驗,圖中圈出的地方是由于初始速度較快而導致出現超調,但系統仍能最終使離合器停止在目標位置。從圖中可以看出,系統可以控制離合器停止在任何位置。在自動換擋系統中,自動變速箱控制單元(TCU)可以根據相應的控制策略和離合器的位置,實時進行離合器的跟隨控制,實現自動起步和換擋過程中離合器的精確控制。
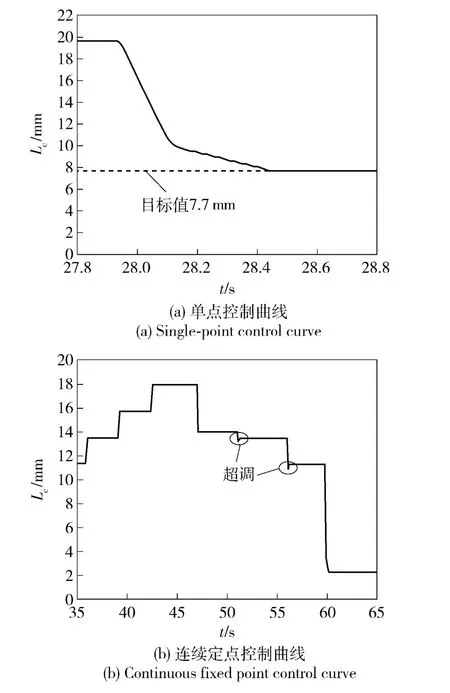
圖11 定點控制曲線Fig.11 Fixed point control curves
4 結論
1)本文對某重型越野車輛原有離合器氣助力液壓操縱系統進行改進,提出采用控制油缸直接推動分離撥叉的方案,降低了原氣路和油路的延遲和損失,提高了離合器的響應速度;既可實現離合器的自動控制,又保留手動應急操縱功能,有效保證了重型越野車輛的機動性和戰場生存能力。
2)離合器控制油缸由比例流量閥控制,可實現分離、保持、接合功能,響應速度快,提高了起步和換擋過程中離合器的可控性和準確性,能改善車輛的起步品質和換擋品質。
3)油缸設計采用CO 方法,與傳統試選校驗法更具有目標性,可有效計算效率,獲得油缸設計的最優解。
本文所設計的離合器操縱系統,實現離合器自動操縱的功能,為進行自動換擋系統中的離合器起步和換擋控制策略的研究奠定了良好的基礎。離合器使用過程中會不斷磨損,致使空行程會增大,如何利用該機構對磨損情況進行自動補償需要進一步深入研究。
References)
[1] 何忠波,白鴻柏. AMT 技術的發展與展望[J]. 農業機械學報,2007,38(5):181 -186.HE Zhong-bo,BAI Hong-bai. Automatic mechanical transmission technique development actuality and expectation[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(5):181 -186.(in Chinese)
[2] 金倫,程秀生,葛安林,等. AMT 換擋過程的離合器控制[J]. 汽車技術,2006(1):11 -13.JIN Lun,CHENG Xiu-sheng,GE An-lin,et al. Clutch control during gear shifting of AMT[J]. Automobile Technology,2006(1):11 -13.(in Chinese)
[3] 陳家瑞,馬天飛. 汽車構造:下冊[M]. 第5 版. 北京:人民交通出版社. 2005.CHEN Jia-rui,MA Tian-fei. Automobile structure:part Ⅱ[M].5th ed. Beijing:China Communications Press. 2005.(in Chinese)
[4] 劉振軍,余猛進,秦大同. 重型車AMT 液控氣助力離合器自動控制系統的設計與開發[J]. 中國公路學報,2010,23(2):105 -110.LIU Zhen-jun,YU Meng-jin,QIN Da-tong. Design and development of heavy vehicle AMT hydraulic control and gas power-assistance clutch automatic control system[J]. China Journal of Highway and Transport,2010,23(2):105 -110.(in Chinese)
[5] 王洪亮,劉海鷗,趙熙俊,等. 基于流量閥的自動操縱機構的AMT 離合器改裝研究[J]. 汽車工程,2011,33(1):47 -51.WANG Hong-liang,LIU Hai-ou,ZHAO Xi-jun,et al. A study on AMT clutch refitted with automatic operation mechanism based on proportional valve[J]. Automotive Engineering,2011,33(1):47 -51.(in Chinese)
[6] 衣超,姜宏暄. 比例流量閥在離合器控制系統中的應用[J].液壓與氣動,2008(12):63 -65.YI Chao,JIANG Hong-xuan. Application of the proportional flow valve in clutch control system[J]. Chinese Hydraulics & Pneumatics,2008(12):63 -65.(in Chinese)
[7] 陳勇,陳瀟凱,林逸. 協同優化方法在電動汽車多學科設計優化中的應用[J]. 汽車工程,2009,31(8):709 -714.CHEN Yong,CHEN Xiao-kai,LIN Yi. Application of collaborative optimization to multidisciplinary design optimization of electric vehicles[J]. Automotive Engineering,2009,31(8):709 -714.(in Chinese)
[8] 成大先. 機械設計手冊:液壓傳動[M]. 北京:化學工業出版社,2010.CHENG Da-xian.Machinerys handbook hydraulic transmission[M].Beijing:Chemical Industry Press,2010.(in Chinese)
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32