基于滑動窗口法的智能開關動作時間動態預測
2014-03-08 02:01:42鄭貴林
自動化與儀表 2014年8期
鄭貴林,陳 曦
(武漢大學 動力與機械學院,武漢 430072)
傳統的電氣開關在投切的過程中,由于電壓直接加載在負載上產生電壓沖擊。在負載上產生沖擊性過渡過程,對負載和電網產生不良影響。在切斷過程中,開關也會產生電弧,給電網帶來沖擊,使得電網電壓不穩定。電弧會給電網中的電氣設備造成影響,使設備的正常壽命降低。此外,由于電弧的產生,傳統開關觸頭會產生高壓火花,進而產生大電流以及高溫,使得開關觸頭融化變形,嚴重情形下會導致觸頭碳化,甚至開關觸頭燒灼到粘合狀態,無法斷開,后果嚴重。
傳統的滅弧措施,不論是通過加強去游離,例如采用真空滅弧、油滅弧等方法;還是提高弧隙介質強度,例如采用特殊的金屬材料作為滅弧觸頭[1-2],這類措施產生了一定的效果。但是其成本居高不下,主要用于電廠、變電站等高壓昂貴設備中,無法普及到一般低壓電氣設備中。因此,本文根據電弧產生的原理,提出一種交流電壓過零點投入,交流電流過零點開斷的無電弧方法。由機械開關配合微處理機及其數學模型和軟件算法,實現低壓電氣設備在投切的過程中無電弧。該方法簡單易實現,且成本低。
1 交流過零點無電弧開關的原理
1.1 基本原理概述
電弧的產生是由于開關觸點在動作時刻兩端的電壓差以及觸點間距離共同作用的結果。電壓過零點指的是開關在輸入電壓Ut=0 V時閉合。當選擇此時投入開關,即可保障瞬時加到負載上的電壓為零,對負載無電壓沖擊。同樣,交流電流過零點是指,在分斷開關時刻的交流電流It=0 A,當開關分斷時刻,由于電流為0,所以不會出現拉弧現象。因此,對負載沒有沖擊,對開關沒有燒灼,對電網也沒有沖擊。
要實現交流過零點投切開關,首先要精確檢測觸點過零點的時刻t0。其次測得機械開關的動作時間ts。根據事先測得的開關動作時間ts計算出指令發出延時時間T-ts,也即t′時刻。延時結束后發出動作控制命令,經開關動作時間ts后正好在下一個開關過零點的時刻閉合或斷開。此時開關完成過零點投切。
1.2 過零點斷開動作時序說明
整個過零點斷開過程可以分別描述為零點檢測過程、開關動作過程以及開關動作時間測量過程。其中開關動作過程分為延時窗口、動作窗口。過零點斷開全過程時序如圖1所示。
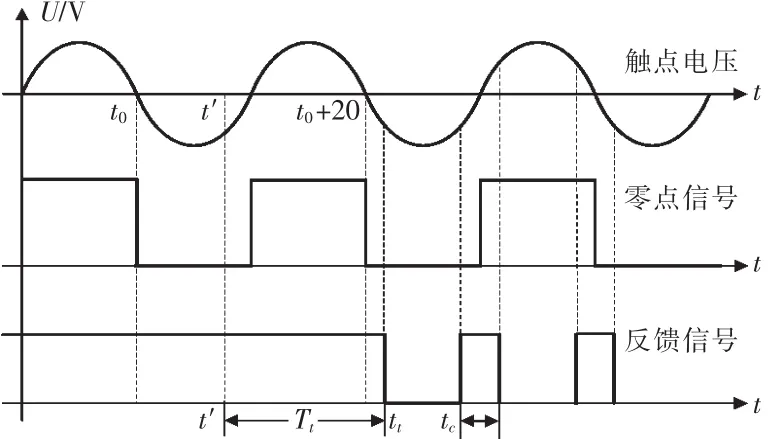
圖1 開關動作時序圖Fig.1 Sequence diagram of switch action
如圖1所示,開關在t0時刻檢測到零點,經過延時時間窗到t′時刻發出控制信號。同時開始計時動作時間,到達t0+20的時刻開關動作,最終到達時間tt后獲取反饋信號,計時終止,時間Tt即為開關動作時間。經測算,固定偏差tc為0.6 ms。因此所測時間(Tt-0.6)可以近似認為開關動作時間。
2 滑動窗口動態檢測原理
2.1 滑動窗口原理概述
由于開關的材料和工藝的差異,每個開關的動作時間并不一致。而且,實驗證明,同一個開關動作時間會隨著使用次數的增加產生變化。因此智能開關必須具備動態矯正開關的動作時間的檢測機制。本文提出滑動窗口動態檢測開關動作時間的方法,通過歷史動作時間來預測開關下一次的精確動作時間。
滑動窗口是指數據流上的一個區間,窗口中保存著數據流中最新進來的N個數據,隨著數據流上新的數據的到來,窗口隊列不斷更新第N+1數據進入,同時丟棄最早的一個數據[3]。采用先進先出機制,保障窗口中總有N個數據,稱為窗口隊列。窗口隊列數據是根據測量結果而不斷更新的,因此稱之為滑動窗口。
由于開關動作時間按照一定的規律不斷進入窗口,從而可精確預測下一次所需要控制的延時時間,確保過零點的投切的準確性,達到動態檢測開關動作,精準控制開關開閉時間的目的。
如圖2所示定義長度為N的一個窗口隊列。N∈(2,4,6,…2K)。 第 K 個數據時,窗口隊列元素分別為 TK+1,……,TK+N。
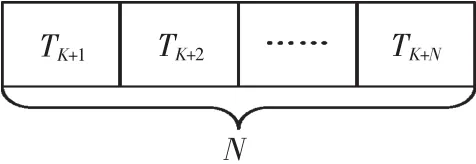
圖2 滑動窗口隊列Fig.2 Slide window queue
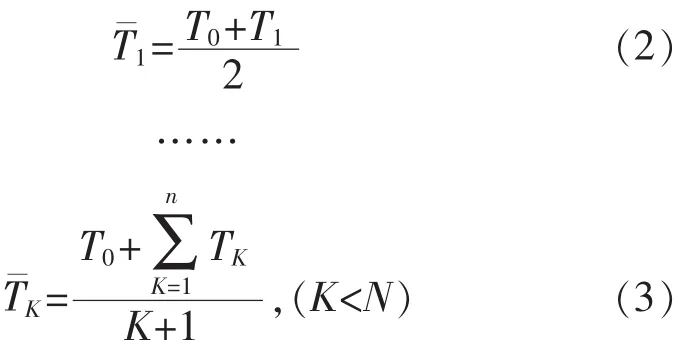
首先按照窗口隊列中的數據大小對數據進行排序,然后去掉極大值和極小值,對剩下的N-2個數據求算術平均值Tˉ。這個算術平均值即為下一次開關動作時間。
初始狀態下,系統中只有一個初始值,也即窗口中只有初始值T0。同時窗口每次獲取一個新的數據,將其放入窗口隊列尾部,然后扔掉原來隊列首位的一個舊數據。由于在開關動作時間的測量中,無法保證每次測得的數據都是準確的。總有一些測量異常值,這些異常的數據是并入新的數據到窗口隊列前需要進行剔除的偶發誤差數據。因此需要設置一個門檻偏差ΔT,當新測量數據滿足:

式(1)則并入窗口隊列。
2.2 滑動窗口算法
初始狀態下,即當K<N時,
當K>N時,為了剔除測量偏差較大的數據,保證窗口平均值的平滑性,新的數據并入窗口隊列都必須滿足檻偏差ΔT。其算法流程如圖3所示。
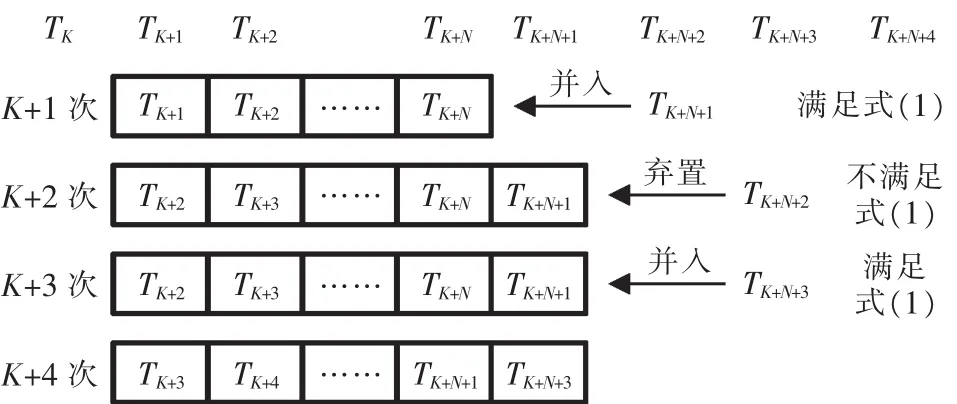
圖3 數據并入窗口隊列過程Fig.3 Progress of data merge into queue
如圖3所示,第K+1次更新數據時,新的數據TK+N+1滿足式(1),新的數據并入窗口隊列,同時TK+1被丟棄。第K+2次更新數據時,新的數據TK+N+2不滿足式(1),新的數據被丟棄。窗口隊列維持原數組[4-6]。
由于開關在大氣中斷開時,在電壓為20 V時若電流為(0.25~1)A,則開關觸頭間隙中就會產生電弧[2]。因此根據電弧產生的電流和電壓最小值,可以確定交流電零點附近一個容錯的ΔT值。也即在ΔT的偏差范圍之內,不會產生電弧。

根據交流電表達式:式中:U(t)為電壓瞬時值;Um為電壓最大值;f為正弦交流電頻率。當U(t)為20 V時,按照220 VAC交流電,可推算出偏離零點t=0.2 ms為能產生電弧的電壓時刻。因此容錯的誤差ΔT必須小于0.2 ms。
3 實驗驗證
3.1 初始狀態收斂實驗
取窗口內數組N=8,將初始值T0分別賦值8,11。 經測得某開關平均動作時間Tˉ=9.20 ms。 當K≤N時實驗數據用Matlab繪制如圖4所示。
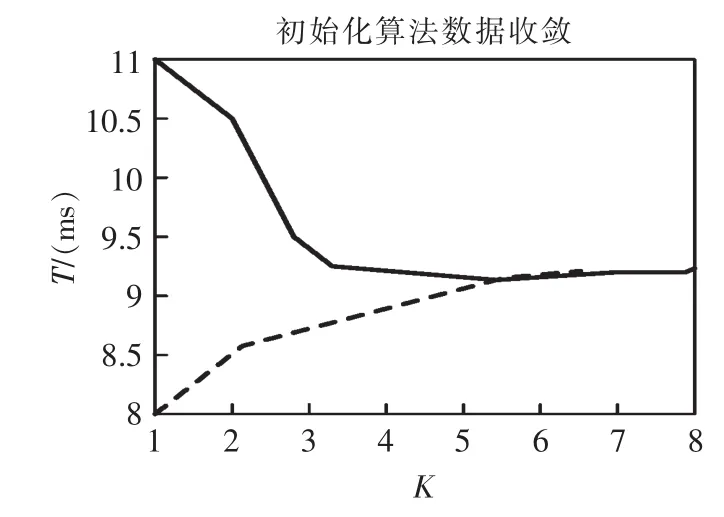
圖4 K≤N時實驗數據曲線圖Fig.4 Experimental data diagram of K≤N
如圖4所示,盡管當T0初始值不同,但均在8次之內收斂至平均值。實驗數據收斂速度隨著初始值T0與真實值Tˉ的偏差減小而減小。但最終在N次以內可收斂至真實值。因此,可以根據大量實驗數據,測得某一類型的開關動作時間平均值,將其作為此類系統的初始值。系統初始化后,經過N次動作,即可得出該系統下使用的開關動作真實值。
3.2 過零點分斷實驗
使用滑動窗口法預測開關動作時間,其最終目的是為了使開關在零點處斷開或者閉合。因此通過一組實驗驗證開關的零點斷開準確性。
根據開關手冊,其電氣壽命為1百萬次。故分別控制開關動作100次,1000次,10000次。記錄測得動作時間,并記錄開關斷開波形如圖5~7所示。
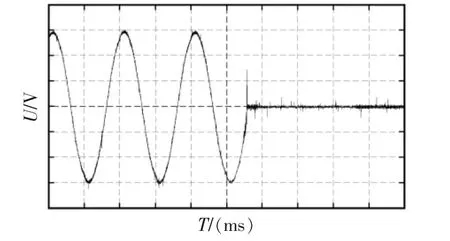
圖 5 K=100 次,Tˉ=9.6 實驗波形圖Fig.5 K=100 times,Tˉ=9.6 experimental waveforms
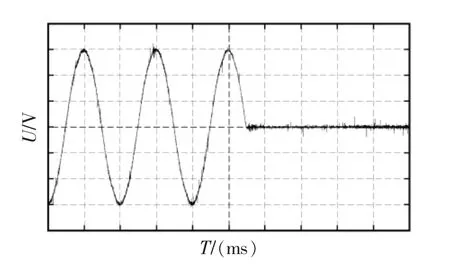
圖 6 K=1000 次,Tˉ=9.9 實驗波形圖Fig.6 K=1000 times,Tˉ=9.9 experimental waveforms
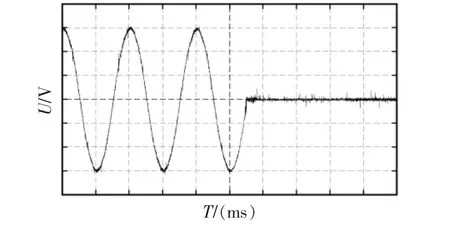
圖 7 K=1000 次,Tˉ=10.2 實驗波形圖Fig.7 K=1000 times,Tˉ=10.2 experimental waveforms
如圖5~7所示。隨著開關使用次數的增加,其動作時間呈微小增長趨勢。通過應用滑動窗口模型,盡管開關動作時間會發生不同的改變,系統也能保證開關在交流過零點時準確斷開。
4 結語
本文提出一種簡單可靠的交流過零點精確測量的解決方法。滑動窗口法動態檢測開關的動作時間,可以有效地檢測和矯正開關的過零點開閉控制。保證交流電零點的時候精準通斷,實現無電弧、高可靠、長壽命的智能開關。
實驗證明,滑動窗口技術的應用,可以達到動態檢測開關動作時間的目的,精確控制開關在交流過零點通斷。
[1] 劉教民.低壓電器開關電弧運動機理及仿真[M].北京:科學出版社,2013.
[2] 許志紅.電器理論基礎[M].北京:機械工業出版社,2014.
[3] 于涌巍,譚久彬.利用滑動窗口法改善測量信號的示值穩定性[J].哈爾濱工業大學學報,2002,34(5):663-666.
[4] ZhuXiao-Dong,HuangZhi-Qiu,ShenGuo-Hua.Variableslide window based frequent ite-msets mining algorithm on large data streams[J].Control and Decision,2009,24(6):832-836,842.
[5] LiFeng-Gang,SunYing-Jia,NiZhi-Wei,etal.The utility frequent pattern mining based on slide window in data stream[C]//ICICTA 2012.Zhangjiajie,2012.
[6] 王栩,李建中,王偉平.基于滑動窗口的數據流壓縮技術及連續查詢處理方法[J].計算機研究與發展,2004,41(10):1639-1644. ■
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
