便攜式多通道振動信號分析儀數采模塊設計
2014-03-08 07:01:25趙慧昌石現峰
自動化與儀表 2014年1期
張 峰,趙慧昌,石現峰
(西安工業大學 電子信息工程學院,西安710032)
旋轉機械廣泛應用于化工、冶金、船運等部門,是相關企業生產的核心設備[1]。旋轉機械設備的故障通常易造成重大經濟損失,甚至災難性后果,因此,采用振動信號分析儀對旋轉機械進行狀態檢測與故障診斷是十分重要的。在一些應用場合,往往需要現場實時采集及處理多路信號,這就對采集系統提出了非常高的要求[2]。傳統振動信號分析儀在滿足便攜的同時一般無法滿足多通道振動信號的同步高速實時采集。本文就是基于此背景設計的振動信號檢測設備,既滿足了便攜及實時性的要求,又能保證多通道振動信號同步高速采集。
1 振動信號分析儀整體設計方案
結合某項目對分析儀的設計需求,提出的需要達到的技術指標為
(1)能夠同步采集24路振動信號和1路鍵相信號;
(2)轉速測量范圍為 0~30000 r/min,振幅測量范圍為 0~2000μm;
(3)轉速測量精度為0.1 r/min,振幅測量精度為0.1μm;
(4)傳感器選用渦流傳感器,其靈敏度為7.99 mV/μm。
基于以上分析儀的技術指標要求,設計出了如圖1所示的方案。該設計方案采用分布式結構,振動信號采集單元和振動信號處理單元選用不同處理器分布處理,數據采集單元處理器負責控制1路鍵相信號和24路振動信號的采集,并將采集到的振動信號寫入共享內存,數據處理單元處理器通過從共享內存讀采集到的數據,并對其進行處理,最后通過網絡接口將處理后的數據傳向PC機的上位機界面進行顯示。分布式的處理方式一方面能夠降低單處理器的任務量和軟件設計的復雜度,另一方面提高了數據處理單元和數據采集單元處理器的處理速率,保證了振動信號的實時采集。共享內存的設計保證了數據采集單元和數據處理單元二者間高吞吐量的數據通信[3]。
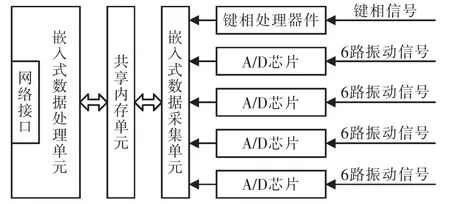
圖1 振動信號分析儀設計方案Fig.1 Design scheme of the vibration signal analyzer
2 分析儀數據采集原理及設計方案
2.1 分析儀數據采集原理
所設計的分析儀采用固定頻率和倍頻采樣兩種采樣方式。固定頻率采樣由系統時鐘控制采樣,采樣頻率為一個預設的固定頻率,采樣信號在相位上與鍵相信號沒有任何關系。倍頻采樣是由鍵相信號啟動采樣過程,采樣速率由軟件控制,通過處理器的定時器控制實現。這種方案通過定時器中斷的控制方式,利用定時器的捕獲功能,不斷地捕捉外部的鍵相信號,處理器實時計算轉子的轉速和倍頻后的采樣點間隔時間,由定時器匹配功能實現硬件級的高精度倍頻信號,控制啟動每一次的模數轉換,從而實現高精度的倍頻采樣。
2.2 數據采集功能設計方案
圖2為分析儀數據采集功能模塊的框架結構,振動信號通過振動傳感器將機械信號轉換成電信號供分析儀進行處理;分析儀接收到的振動信號為模擬信號,需對模擬信號做一定調理,以適應后續A/D芯片的輸入電壓量程;調理后的模擬信號需經過A/D轉換器件轉換成數字信號,以便處理器對信號的調度;處理器讀取轉換好的數字信號,并將信號寫入共享內存;共享內存實現信號采集單元與信號處理單元兩者間的高速數據交換。

圖2 分析儀數采功能模塊框架結構Fig.2 Frame structure for data collection function module of analyzer
3 器件選型及電路設計
3.1 處理器選型及電路設計
基于嵌入式技術設計的分析儀,嵌入式處理器將是系統的核心器件。設計結合處理速度、定時功能、引腳數及分析儀便攜性、低功耗的需求,選用ARM處理器,數據采集單元處理器選用NXP公司的LPC1768處理器,該處理器采用Cortex-M3內核,用于處理要求高度集成和低功耗的嵌入式[4]應用,工作頻率可達100 MHz,LPC1768處理器有4個通用定時/計數器,共有8個捕獲輸入和10個匹配輸出,相比于常規DSP芯片,在定時功能上有明顯的優勢。12位的A/D轉換器和10位D/A轉換器可以使處理器對鍵相信號進行控制,保證倍頻采樣的準確性。該處理器外設組件包含高達512 KB的Flash存儲器和64 KB的數據存儲器。處理器工作于3.3 V的電壓下,為主振蕩器配置12 MHz的晶振。
3.2 AD器件選型及電路設計
A/D處理器件的選取主要結合系統對多路、采樣精度和采樣速率的需求,選用了TI公司的ADS8365芯片,這是一款6通道16位分辨率具有同步采樣功能的模數轉換器[5]。該芯片采用差分輸入方式,可通過3個保持信號控制6路信號的同步采集,4片即可滿足24路信號同步采集的要求;在最高轉速30000 r/min,128倍頻采樣下,采樣頻率為64 kHz,該芯片250 kHz的最大采樣速率,能夠保證系統指標要求;振動信號的電壓范圍是0~±20 V,傳感器靈敏度為7.99 mV/μm,ADS8365的16位分辨率使系統的測量精度為0.038μm(≤0.1μm),滿足系統指標要求。
圖3為一片ADS8365轉換器的電路圖,該圖中的6個通道輸入6路調理好的差分信號,16位的數字信號接處理器,通過處理器控制讀寫引腳位讀取振動信號。外部配置5 MHz的有源晶振提供時鐘,分別給芯片提供5 V的模擬電壓和3.3 V的數字電壓,H OLDA、HOLDB、HOLDC三引腳連在一起接處理器,控制6路信號的同步采樣。分析儀采用4個圖3所示的A/D轉換電路實現24路振動信號的采集。
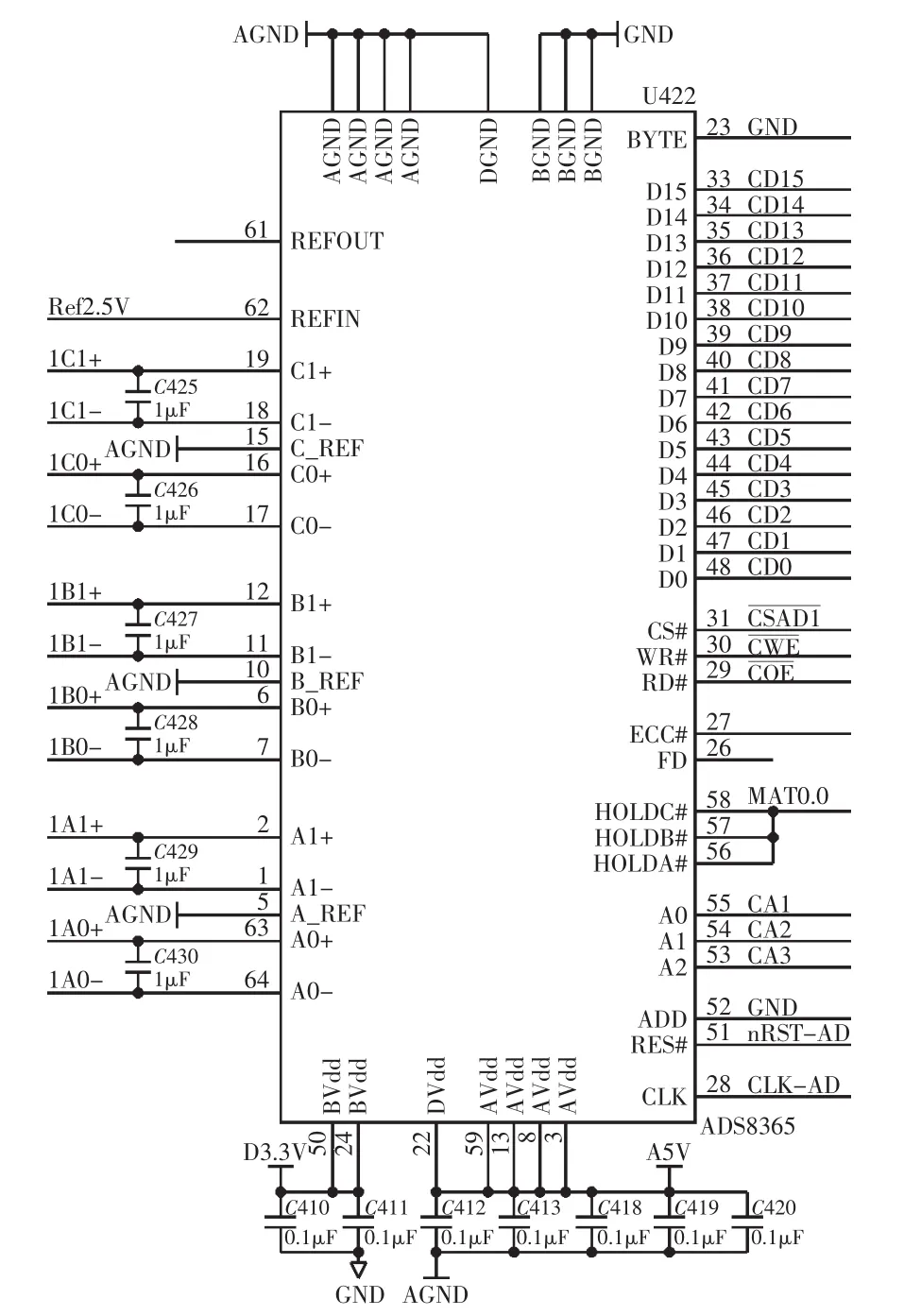
圖3 A/D轉換電路設計Fig.3 Circuit design of A/D conversion
3.3 振動信號調理電路
傳感器輸出的振動信號電壓量程為0~±20 V,而A/D器件要求輸入的電壓為0~5 V差分信號,為了使ADS8365能夠對振動信號進行模數轉換就需要設計出合理的調理電路,圖4為分析儀的其中1路信號調理電路,其他通道與此相同。調理電路選用LT1990差分運算放大器,能夠實現輸出電壓1或10倍增益可選功能。精密電阻R1和R25對輸入信號進行分壓,分壓后的電壓為0~2.5 V。為其提供2.5 V的參考電壓,則調理輸出的電壓為0~5 V。T1和T2為輸出電壓1或10倍增益控制端口,通過將T1和T2開路或接地實現其功能。R49和C1與R50和C2為濾波電路。
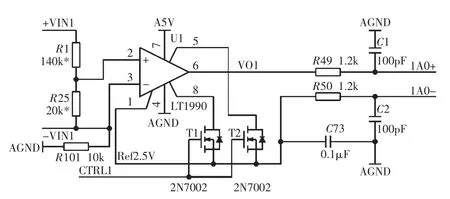
圖4 分析儀模擬信號調理電路Fig.4 Analog signal conditioning circuit of analyzer
3.4 鍵相信號整形電路
想實現準確的倍頻采樣就需要得到整形較好的鍵相信號波形,這就需要設計整形電路對原始的鍵相信號進行整形。
圖5為鍵相信號的整形電路,通過遲滯型電壓比較器MAX913實現。傳感器輸出的鍵相信號KO為0~5 V,該信號接入電壓比較器待整形電壓輸入引腳,同時為處理器提供參考電壓。處理器的A/D通道量程為0~3.3 V,而鍵相電壓為0~5 V,為防止處理器過載,先經過精密電阻R107和R108對電壓進行衰減。處理器根據A/D檢測到的鍵相信號,通過D/A給電壓比較器配置相應的參考電壓。U102組成同相放大器,對處理器輸出的參考電壓放大2倍。電壓比較器輸出的鍵相信號的波形整形較好,處理器通過捕獲整形信號的下降沿,準確測定旋轉設備的轉速。通過處理器檢測鍵相信號電壓配置電壓比較器的參考電壓,一方面增加了處理器對鍵相信號的判定功能,另一方面增強了對鍵相信號整形的適應性和靈活性,可對不同量程的鍵相信號在不改動硬件的同時只需配置軟件即可整形。
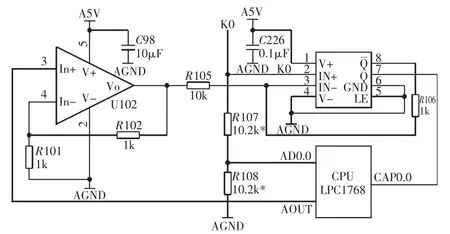
圖5 鍵相信號整形電路Fig.5 Waveshaping circuit for key-phase signal
3.5 共享內存的設計
數據采集單元和數據處理單元二者間高效的數據通信是保證系統實時性的基礎。共享內存的設計相比于處理器間的串口或并口通信,通信速度更快,吞吐量更大,可保證系統的實時性。另外,共享內存的通信又不需要任何通信協議,降低了編程的難度[6]。再結合存儲容量、性價比等因素,最終選擇ISSI公司的高速靜態隨機存儲器IS61LV51216作為共享內存,它是3.3 V供電的512 K×16位存儲器,具有高速低功耗的特點。
共享內存電路設計如圖6所示,數據處理單元和數據采集單元通過訪問共享內存進行高速通信,但不可同時訪問,為避免同時訪問的沖突,電路通過設計“忙”信號電路來控制,兩處理器只有在BUSY信號為高電平時才能訪問共享內存,訪問時通過控制BUSY-Y來使BUSY拉低,另一處理器便無法訪問共享內存,避免了兩處理器同時訪問的沖突。
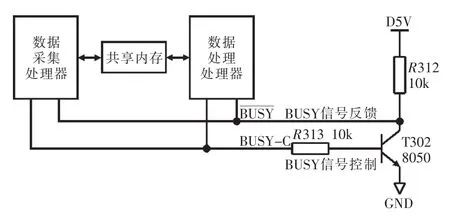
圖6 共享內存設計方案Fig.6 Design scheme of shared memory
4 數采模塊軟件設計
軟件部分的開發設計主要是基于嵌入式ARM處理器LPC1768的硬件平臺之上,采用層次化結構進行設計[7]。軟件結構如圖7所示。
底層硬件驅動程序層主要完成對硬件模塊的直接操控,包括總線通道接口、定時器接口、A/D和D/A接口、實時時鐘接口等。嵌入式操作系統層是底層硬件和應用軟件之間的過渡,管理調配系統的軟硬件資源。應用程序層主要負責控制采樣,通過捕獲鍵相獲取振動設備轉速,根據配置的倍頻數計算采樣間隔時間,設置匹配定時值,及何時讀取振動信號,何時向共享內存寫數據等工作。在嵌入式系統開發中,采用這種層次化的軟件設計,層次間功能劃分清晰,不僅方便程序的設計編寫,也便于軟件的升級、更新和維護[3]。
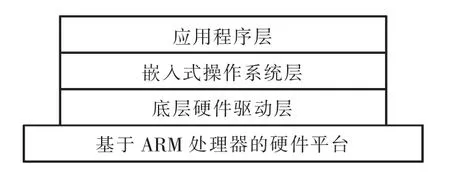
圖7 數采模塊軟件設計結構圖Fig.7 Soft structure diagram for data collection module
5 結語
文中所設計開發的便攜式振動信號分析儀在工業現場得到了很好的應用。分析儀設計及應用的實踐表明:高性能A/D電路的設計、基于ARM處理器的嵌入式電路設計、鍵相信號整形電路的設計及采用“忙”信號控制的共享內存電路設計,保證了多路振動信號的同步采集、實時性較好、采樣速率和采樣精度較高;論文所設計的便攜式振動信號分析儀在體積、重量、易攜帶方面達到了預期目標。
[1] 張峰,石現峰,張學智.數字信號處理原理及應用[M].北京:電子工業出版社,2012.
[2] 樓建忠,楊世錫,馬麗.大型旋轉機械振動信號采集與處理系統的研究[J].浙江理工大學學報,2005,22(2):154-156.
[3] 張峰,石現峰.基于嵌入式技術的汽輪機振動信號分析儀[J].自動化與儀表,2012,27(10):13-15.
[4] 周立功.ARM嵌入式系統基礎教程[M].北京:北京航空航天大學出版社,2008.
[5] 詹哲軍,張愛玲,盧秀芬.基于TMS320F2812同步數據采集系統的設計[J].電氣技術,2008(7):52-55.
[6]SU Jing-ming,HONG Yan.Research on dual-core low-voltage feeder switch control system based on DSP and ARM[C]//Proceedings of the 30th Chinese Control Conference.Yantai,2011.
[7] YANG Lan-ying,WANG Jin-hai.The design of household intelligent control terminal based on android platform[C]//2012 IEEE 19th International Conference on Industrial Engineering and Engineering Management.Changsha,2012.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
