AGV控制系統(tǒng)研究
2014-03-09 03:31:38夏田劉曄蔣曉陽
機床與液壓 2014年10期
關鍵詞:界面
夏田,劉曄,蔣曉陽
(1.陜西科技大學機電工程學院,陜西西安 710021;2.中國兵器工業(yè)第二0二研究所,陜西咸陽 712000)
AGV控制系統(tǒng)研究
夏田1,劉曄1,蔣曉陽2
(1.陜西科技大學機電工程學院,陜西西安 710021;2.中國兵器工業(yè)第二0二研究所,陜西咸陽 712000)
以固高科技有限公司的GE-40-SV運動控制器作為AGV運動控制核心,采用BG1Z型增量式編碼器采集電機轉速及方向,利用PC作為公共平臺,以VC++6.0作為軟件開發(fā)工具,建立了AGV的控制系統(tǒng),從而實現(xiàn)AGV直行、轉彎、自轉及調速等基本運動功能。
AGV;運動控制器;編碼器
自動引導小車 (Automated Guided Vehicle,AGV)是柔性制造系統(tǒng)、現(xiàn)代倉儲等自動化生產中不可或缺的物流設備,對AGV的控制研究對先進制造系統(tǒng)的發(fā)展有著重要的價值。
文中利用深圳固高科技有限公司 (以下簡稱:固高科技)的GE-400-SV運動控制卡[1],建立了實現(xiàn)AGV基本運動功能的控制系統(tǒng)。
1 AGV車身結構
AGV車身由步進電機、驅動輪、自由輪及車載電源等組成,如圖1所示。
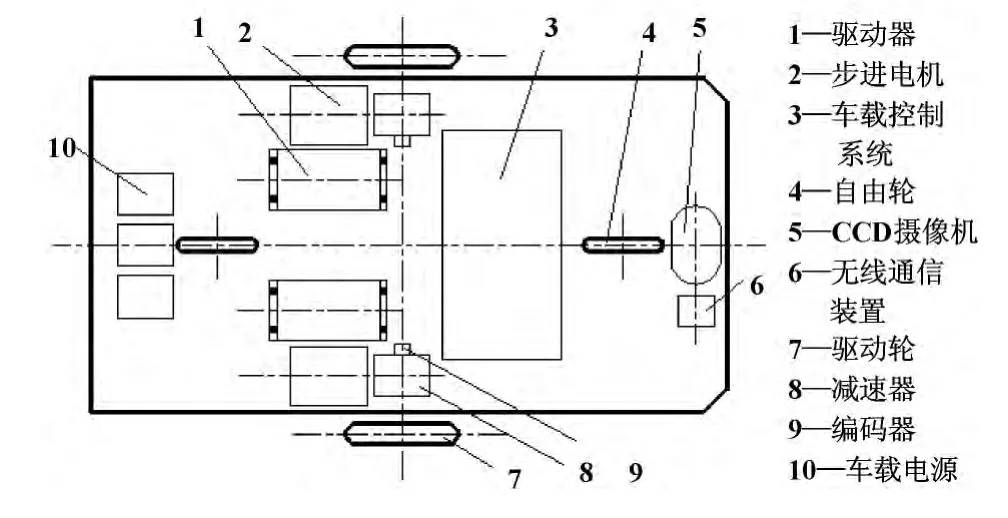
圖1 AGV車身部分的構成
AGV為四輪結構,中間兩輪作為驅動輪、前后輪作為自由輪。AGV采用兩輪獨立驅動,轉向方式利用兩輪電機差速轉向。
采用步進電機單獨驅動,由車載控制系統(tǒng)控制步進電機,通過減速機帶動兩驅動輪,實現(xiàn)兩輪的差速驅動[2]。
2 AGV控制系統(tǒng)硬件
AGV運動控制采用“PC+運動控制器+步進電機”的模式來實現(xiàn)的,如圖2所示。

圖2 AGV驅動輪控制系統(tǒng)框圖
如圖3所示,AGV硬件系統(tǒng)主要由CCD傳感器、圖像采集卡、PC、路面標識符等組成。采用固高科技的GE-400-SV運動控制器[1]作為AGV運動控制核心,以PC作為公共平臺,建立AGV控制的硬件平臺。
運用該運動控制卡提供的S-曲線加減速模式[3]來控制軸的運動;選用WindowsCE嵌入式操作系統(tǒng)(固高科技的W_ce3.0版本)。將增量式光電編碼器與運動控制卡連接應用,把編碼器檢測得到的信息反饋給控制卡。
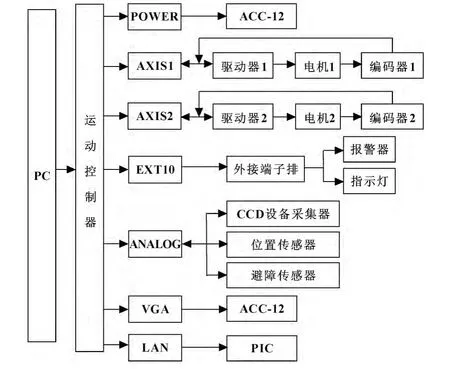
圖3 AGV控制系統(tǒng)硬件結構
AGV控制系統(tǒng)用PC作為公共平臺,在PC中嵌入GE-400-SV運動控制器,從而實現(xiàn)控制器對驅動電機的直接控制。
運動控制器的接口分配方面,POWER為電源接口;兩個驅動電機分別由 AXIS1和AXIS2控制;EXT10是高速IO擴展接口,可以在其上外接端子板來實現(xiàn)各種輸入輸出的需要;ANALOG作為模擬量輸入輸出接口,直接與速度、方向以及超聲波傳感器連接作為速度、方向以及避障傳感器;顯示設備與VGA接口連接,可顯示AGV的運動狀態(tài),從而實現(xiàn)人機交互的功能;AGV外部的信息交換由主LAN接口實現(xiàn)。
3 AGV控制系統(tǒng)軟件
以WindowsCE操作系統(tǒng)作為軟件開發(fā)平臺,利用VC++作為軟件開發(fā)工具。AGV控制軟件主要包括手動和自動兩個功能部分。手動主要是實現(xiàn)AGV的現(xiàn)場調試及在出現(xiàn)故障時候的處理。自動則是在AGV自身及周圍環(huán)境條件滿足的情況下,根據工作現(xiàn)場的數字化地圖和上位管理計算機發(fā)出的任務指令統(tǒng)籌調度車輛,實現(xiàn)任務車輛的指定軌跡行走,準確、高效地完成預定作業(yè)任務,控制相關設備并及時進行自充電。
為了實現(xiàn)程序的可移植性,同時提高系統(tǒng)的應用性,對AGV控制軟件進行了模塊化設計,并分為多層結構,主程序實現(xiàn)整個系統(tǒng)的協(xié)調控制,子程序負責實現(xiàn)路徑規(guī)劃、狀態(tài)判斷等控制。如圖4所示。
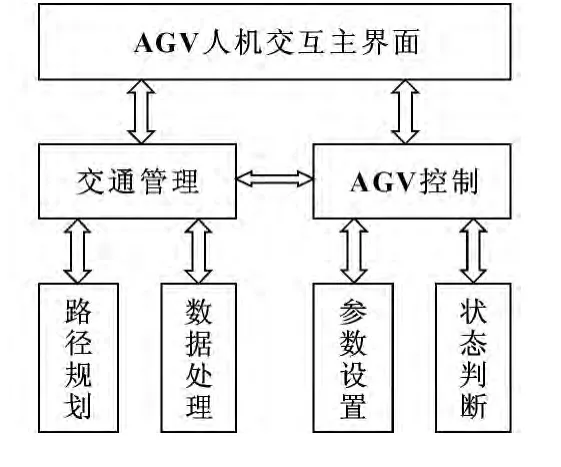
圖4 AGV控制系統(tǒng)軟件結構圖
3.1 控制軟件的實現(xiàn)方式
采用的是基于X86構架的普通PC機,安裝的操作系統(tǒng)為WindowsCE,W_ce3.0版本;運動控制卡為固高系列運動控制卡,型號為GE-400-SV;運動控制卡直接插到PC機的卡槽,通過PC機中的控制系統(tǒng)軟件調用運動控制卡的相關命令實現(xiàn)對AGV的控制。
AGV控制軟件采用面向對象的Visual C++6.0作為軟件編程環(huán)境[4],通過GE-400-SV運動控制器提供的驅動程序如GT400.h、GT400.lib、GT400.dll等,結合AGV自動導航、行走通信等實現(xiàn)控制軟件部分[5]。
3.2 人機交互界面
人機界面是用戶與系統(tǒng)交互的窗口,用戶可以通過較為直觀的圖形界面獲取系統(tǒng)信息,從而完成對AGV狀態(tài)的監(jiān)測、控制以及各種參數的合理配置等。
(1)AGV人機交互主界面
AGV人機交互主界面如圖5所示。在此界面主要是完成軟件功能模塊的選擇,主要功能模塊為交通管理模塊和AGV控制模塊。
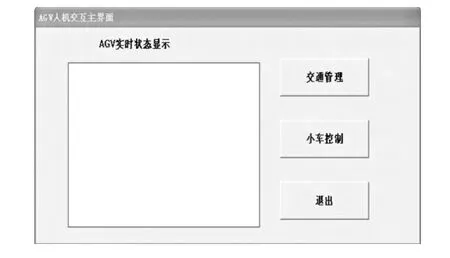
圖5 AGV人機交互主界面
(2)AGV運動控制模塊
AGV運動控制模塊涵蓋了AGV的所有功能指令,包括AGV的前進、后退及左、右轉彎指令,自動/停止指令,AGV參數的設置,路徑參數的相關設置以及通信設置等,AGV控制模塊的界面見圖6。
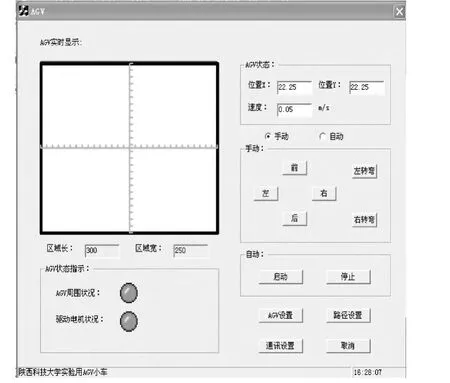
圖6 AGV運動控制界面
進入AGV控制模塊后,首先判斷是選擇手動或是自動模式:若選擇手動模式,則AGV按照手動命令運行,此時為點動模式;若選擇自動模式,則AGV進入視頻采集與顯示模塊,判斷AGV位置,若在可識別導引位置,則AGV正常朝著目標位置運行;若在可識別導引盲區(qū),AGV不動且報警燈閃爍。另外,AGV車體本身判斷正常后,在起步前還需要判斷要前進的一定車距內的障礙物是否存在。如果檢測到障礙物,AGV立即停車并報警;如果沒有障礙物,對所采集到的圖像進行處理,判別AGV具體位置,通過AGV當前位置信息對AGV進行導引,并進行調速控制。
(3)交通管理模塊
交通管理模塊,除了具有一般意義上的交通管理功能外,還包括車輛運行環(huán)境信息的錄入、具體是哪些AGV或哪個AGV運行、目的地的選擇及選用哪一種行進模式等。交通管理模塊的界面如7所示。
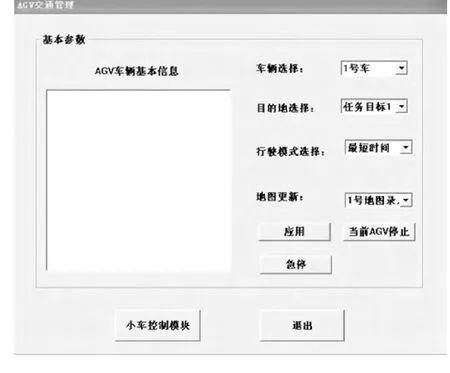
圖7 交通管理模塊界面
4 結論
以固高科技GE-40-SV運動控制器作為AGV運動控制核心,采用BG1Z型增量式編碼器采集電機轉速及方向,利用PC作為公共平臺,以VC++6.0作為軟件開發(fā)工具,建立了AGV的控制系統(tǒng),結構簡單、體積小、功耗低、產品易升級更新。
[1]Jung H-Kyun,Hong Suk_Kyo,Choi Hyoun-Chul,et al.Path Planning and Obstacle Avoidance of Robot Using New Wall-Following Algorithm[C]//Proc Asian Control Conf,Shanghai,2000:1628 -1633.
[2] SIEGWART Roland,NOURBAKHSH Illah Reza,SCARAMUZZA Davide.Introduction to Autonomous Mobile Robots[M].The Massachsetts Institute of Technology Press,2009:32-34.
[3]CHOW W M.Development of an Automated Storage and Retrieval System for Manufacturing Assembly Lines[C]//IEEE International Conference on Robotics and Automation.Proceedings,1986:490 -495.
[4]周鳴揚.Visual C++界面編程技術[M].北京:北京希望電子出版社,2008.
[5]王礴.GUC-GE400SV運動控制器編程手冊:CPAC版本[M],2009.
Research of AGV Control System
XIA Tian1,LIU Ye1,JIANG Xiaoyang2
(1.Institute of Electrical and Mechanical Engineering,Shaanxi University of Science and Technology,Xi'an Shaanxi710021,China;2.Institute No.202 of China Arms Industry Goup Corporation,Xianyang Shaanxi712000,China)
Using GE-400-SV motion controller of Googol-tech Co.,Ltd.,asmotion control core,BG1Z incremental encoder to collect speed and direction signals,PC as the public platform,and VC++6.0 as software development tools,the AGV control system was setup.Thus some basicmovement functions of AVG likemoving straight,making turns,rotating,regulating speed were realized.
AGV;Motion controller;Encoder
TP273
B
1001-3881(2014)10-169-3
10.3969/j.issn.1001 -3881.2014.10.051
2013-04-09
咸陽市科技計劃項目 (2011k08-13)
夏田 (1962—),女,碩士,教授,研究方向為數控裝備。E-mail:517487883@qq.com。
猜你喜歡
艦船科學技術(2022年16期)2022-09-22 02:15:00
北京航空航天大學學報(2021年6期)2021-07-20 07:23:54
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
制造技術與機床(2017年11期)2017-12-18 06:47:29
金秋(2017年4期)2017-06-07 08:22:16
蘇州科技大學學報(自然科學版)(2017年1期)2017-03-20 15:25:18
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
