六軸機器人設計及動力學分析
2014-03-09 02:07:02周會成任正軍
機床與液壓 2014年9期
周會成,任正軍
(華中科技大學機械學院,湖北武漢 430074)
六軸機器人設計及動力學分析
周會成,任正軍
(華中科技大學機械學院,湖北武漢 430074)
按照機器人設計要求對機器人進行了本體機械設計,并借助SolidWorks繪出其三維實體模型;然后將該虛擬機器人導入ADAMS平臺,再參照機器人實際的幾何參數、物理特性以及約束條件,建立了該機器人的動力學仿真模型,同時在接近機器人最大載荷處進行空間軌跡跟蹤的仿真。仿真結果證明了本體機械設計的合理性,并為繼續優化機器人結構和提升控制品質的后續研究工作提供了有價值的數據信息。
六軸機器人;本體設計;動力學仿真
工業機器人由于能夠適應柔性自動化生產的要求,因而在近代得到了迅猛的發展。在工業機器人的研究和設計過程中,機器人的運動學和動力學系統的有關理論與應用一直是研究人員關注的重點內容。開展機器人動力學研究的主要目的在于:一方面有助于改善機器人控制系統工作的穩定性和控制精度;另一方面有助于實現機器人本體結構設計的動力學優化,或對既有機器人結構做動力學特性的評估和檢驗。
如前所述,機器人動力學分析的主要目的是用于對尚在設計中的和現有的機器人機械本體結構做運動學和動力學方面的合理性評估,以及用于改善機器人運動控制的品質,并進而實現動態控制。通過動力學仿真對機器人本體結構進行優化是近幾年才提出來的,且越來越引起人們的注意。目前,在機器人機構的設計中,如運動系統各種參數 (尺寸、質量、慣量)以及執行驅動元件的選擇常常是基于經驗,而缺乏系統的設計方法。因此,對于實際應用的機器人機構,很多參數的選擇及馬達功率的確定往往是過大的,這從能量耗損和操作速度的觀點來看不是最優的。因此,研究對于機器人機構最優的準則也是十分重要的。
文中先按照設計要求設計出機器人的機械本體,并借助SolidWorks建立了該6自由度弧焊機器人的三維實體模型,然后將該模型導入ADAMS平臺,建立了該機器人的動力學仿真模型,并對其進行動力學仿真,為優化機器人結構和提升控制品質的后續研究工作提供有價值的數據信息。
1 機器人本體機械結構
機器人主要用于焊接,末端載荷僅僅考慮焊槍自動送絲機等焊接設備重力,考慮到不同設備重力差別,設計載荷定在200 N,留有余量。設計要求手臂最長臂展2 m。考慮到有6個旋轉關節的鉸接開鏈式機器人操作機從運動學上已被證明能以最小的機構尺寸為代價獲得最大的工作空間,該機構采用6個自由度的設計,其中3個自由度用于控制焊槍端部的空間位置,另外3個自由度用于控制焊槍的空間姿態。
機械手本體由底座、轉臺、大臂、肩部、小臂、手腕、末端執行器所組成。共有6個自由度,依次為:轉臺回轉、大臂俯仰、小臂俯仰、小臂回轉、手腕俯仰和手腕回轉。
各個關節運動范圍限制見表1。

表1 各關節范圍
根據機器人運動空間要求,先確定機器人基本幾何尺寸,繪制機器人關節作業區間圖,如圖1所示。
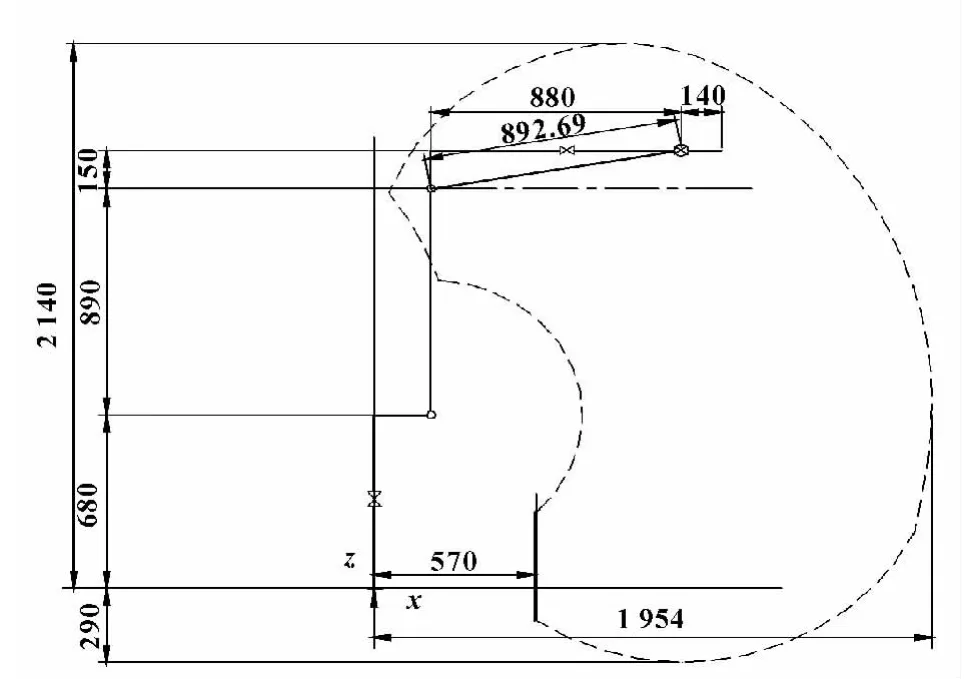
圖1 機器人xz平面作業區間圖
在確定了機器人基本幾何尺寸后,根據設計要求以及相關參數,對機器人進行了詳細設計,并利用SolidWorks繪出其三維模型,如圖2所示。該方案電機全部外置,這樣不僅布線方便,而且降低了對電機尺寸的要求,有利于減少成本。為了減小對二軸電機功率要求還特別設計了平衡缸部分,平衡缸的使用不僅降低了對二軸電機功率需求,而且增加了機器人的運動穩定性。三軸驅動采用平行四邊形機構,并設計了平衡錘,降低了對三軸電機功率要求。一、二、三軸減速采用RV減速器,四軸采用二級齒輪減速,五、六軸采用諧波減速器減速。其中底座、轉臺、平衡錘、拉桿采用灰鑄鐵,而大臂、肩部、上臂以及手腕相關鑄件則采用鑄鋁。
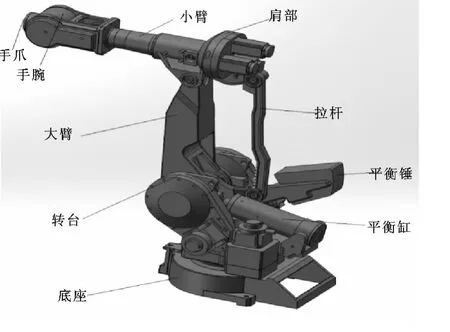
圖2 機器人三維模型
2 機器人動力學仿真模型的建立
機器人物理模型的創建是動力學分析的前提,也是該項技術的基礎,模型的準確合理性直接影響到仿真數據的正確性,所以將仿真前的模型建立得更精確是動力學分析中必不可少的一步。
建立機器人動力學模型實際上是對系統的如下4個要素進行定義:物體、鉸、外力、力元。定義如下:
物體,多體系統中的構件定義為物體。機器人零部件眾多,如果將整個模型導入ADAMS,不僅工作量大容易出錯而且沒有必要,所以必須做適當簡化。將機器人中沒有相互運動且材質相同的構件合并成一個部件,然后裝配,經過簡單的模型預處理后,保存為STEP格式,導入ADAMS,然后設定材料信息,便完成了對物體的定義。
鉸,在多體系統中將物體間的運動約束定義為鉸,實際工程對象中機構的運動副是鉸的物理背景。在該系統中,分別在手爪和手腕、手腕和上臂、上臂和肩部、肩部和大臂、肩部和拉桿、大臂和轉臺、轉臺和平衡錘、平衡錘和拉桿、轉臺和底座、平衡缸與轉臺、平衡缸與大臂之間添加轉動副,在平衡缸拉桿與平衡缸缸體之間添加移動副。另外相互固定部件之間的固定副就不一一列出。
外力,多體系統外的物體對系統中的物體的作用力定義為外力 (偶)。在此系統中,外力主要指重力以及自動焊接設備對機器人的外載荷。添加重力,并在手爪末端添加外載荷200 N。
力元,在多體系統中物體間的相互作用定義為力元。在此系統中,平衡缸內彈簧的力學模型即為力元。彈簧采用ADAMS內置彈簧,直接設定其相關參數即可,如圖3所示。

圖3 彈簧定義窗口
定義好模型后使用model verify命令檢查模型,如圖4所示。定義好后模型共有6個自由度,與實際模型相符,定義好后的機器人動力學模型如圖5所示。
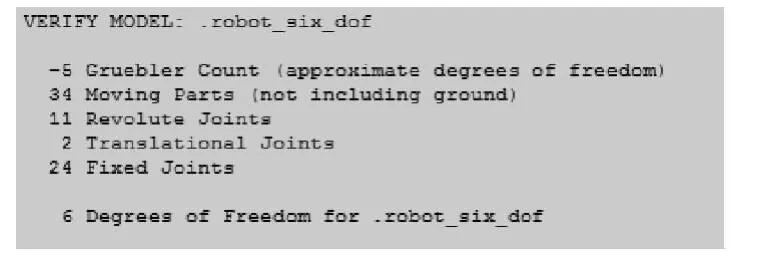
圖4 模型檢查結果
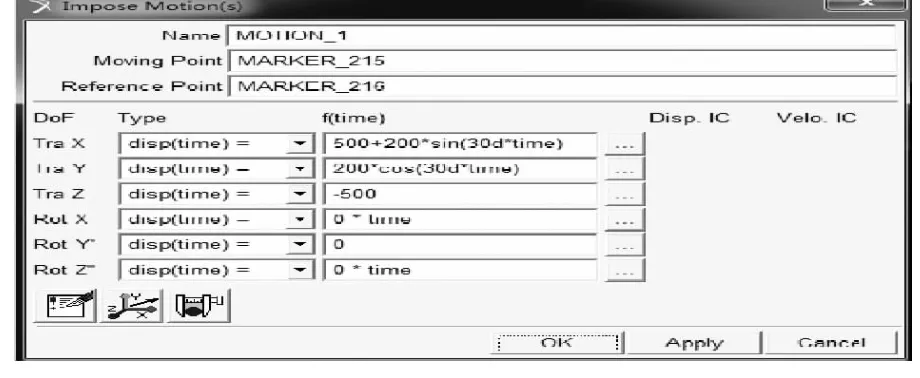
圖5 多自由度驅動定義窗口
3 機器人動力學仿真
此次仿真模擬機器人的一種典型工況:機器人焊接焊縫。在這種工況下,分別對比有無平衡裝置的兩種情況下機器人的動力學參數。
模擬機器人焊接空間一半圓焊縫,即機器人末端沿空間半圓軌跡運動。要得到各個關節軌跡有兩種方法:第一種利用MATLAB工具箱ROBOTICS TOOLBOX建立機器人的仿真模型,該工具包提供了基于關節空間的軌跡規劃函數,只需要給定機器人預期軌跡便可求出各個關節的運動數據;第二種方法可以利用ADAMS的多自由度驅動,如圖5所示,直接驅動機器人末端點按照預期軌跡運動,然后通過測量得到各個關節的關節軌跡數據。這種適用于比較簡單的軌跡,在此次采用。然后將這些數據導入ADAMS中,并且分別生成Spline曲線函數,作為各個關節的驅動函數。仿真流程見圖6。
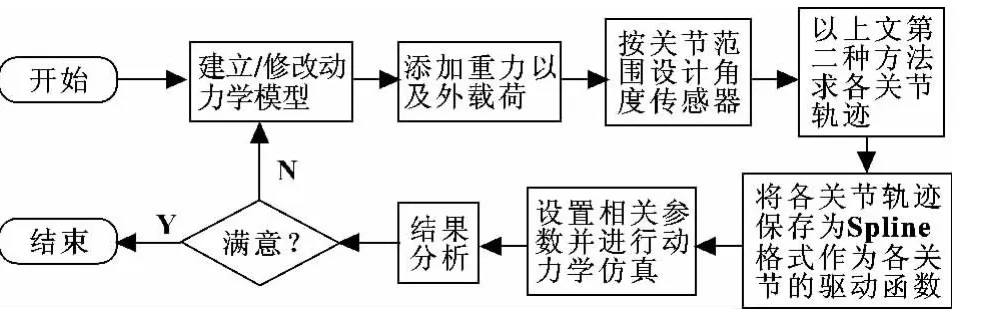
圖6 仿真流程圖
對于沒有平衡裝置的情況,只需把平衡錘、平衡缸缸體質量設為0,并去掉缸內彈簧,按以上步驟仿真即可。兩種情況末端軌跡以及各軸關節軌跡和關節角速度、角加速度都是一樣,只是關節轉矩不一樣,設計的平衡系統對二、三軸影響較大,故主要對比二、三軸轉矩。
仿真結果曲線如圖7—14所示。
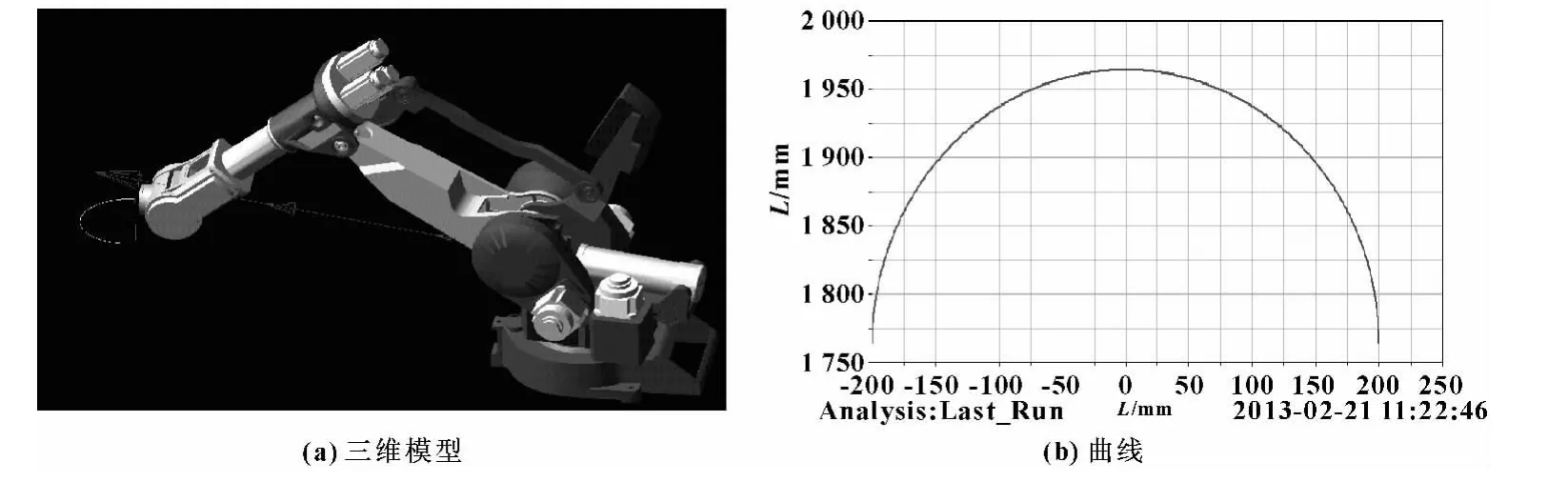
圖7 仿真軌跡圖
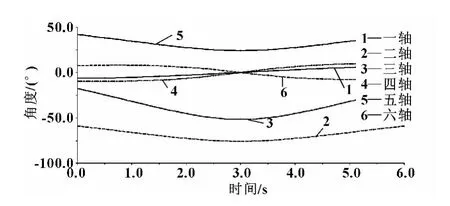
圖8 各軸關節軌跡圖

圖9 各軸關節角速度圖
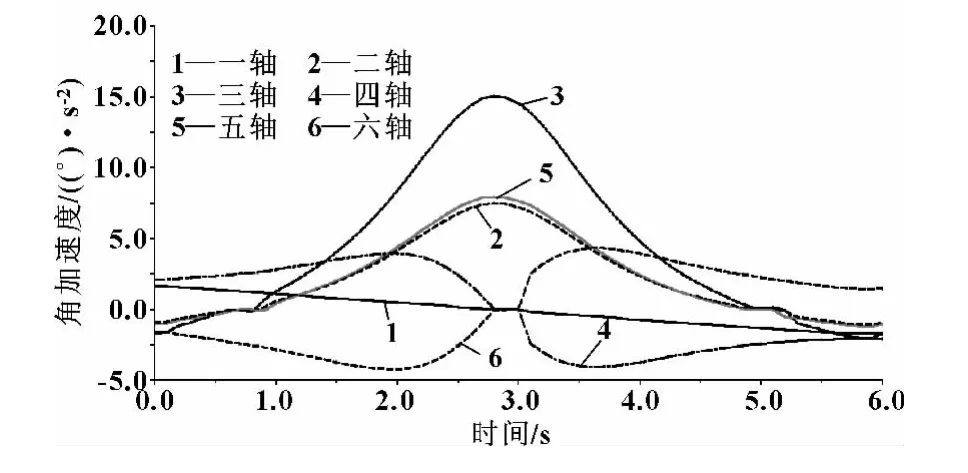
圖10 各軸關節角加速度圖
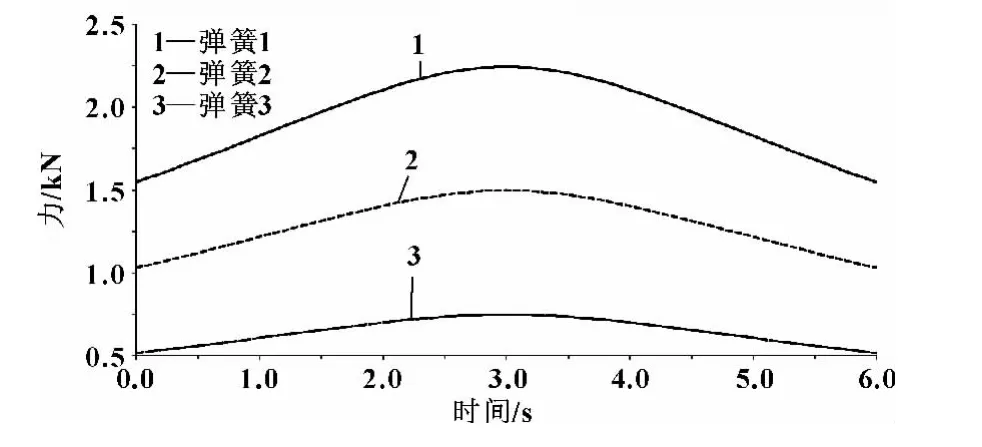
圖11 彈簧提供的平衡力
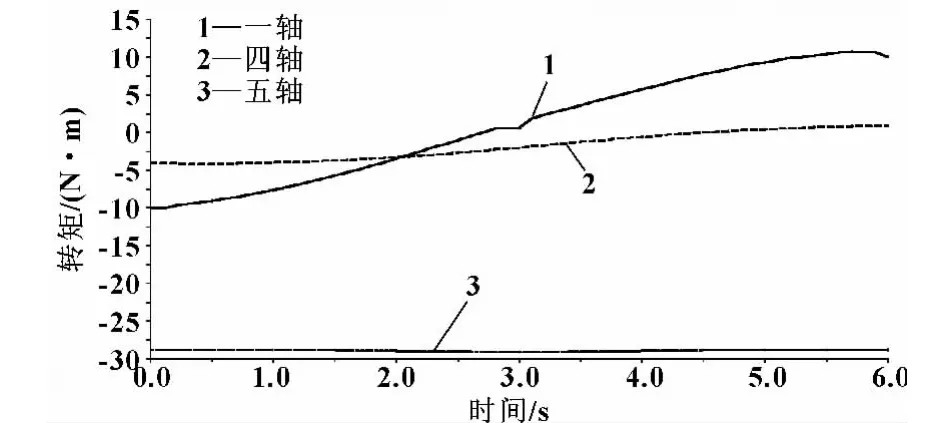
圖12 一、四、五軸關節轉矩
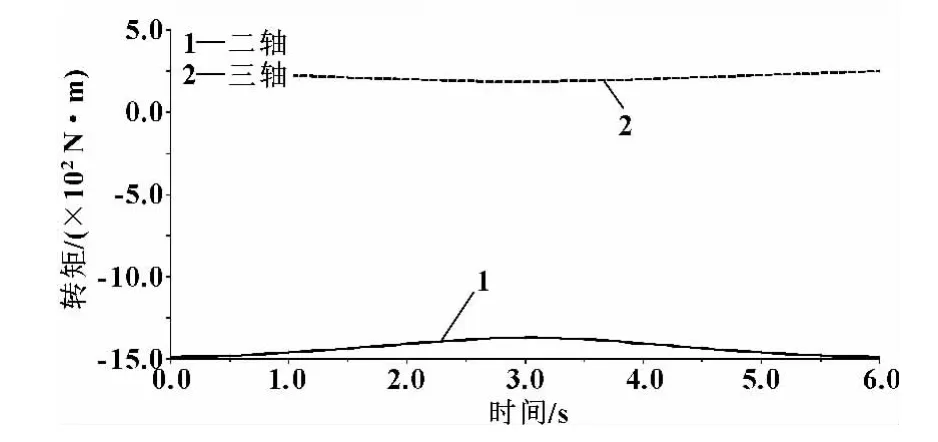
圖13 二、三軸關節轉
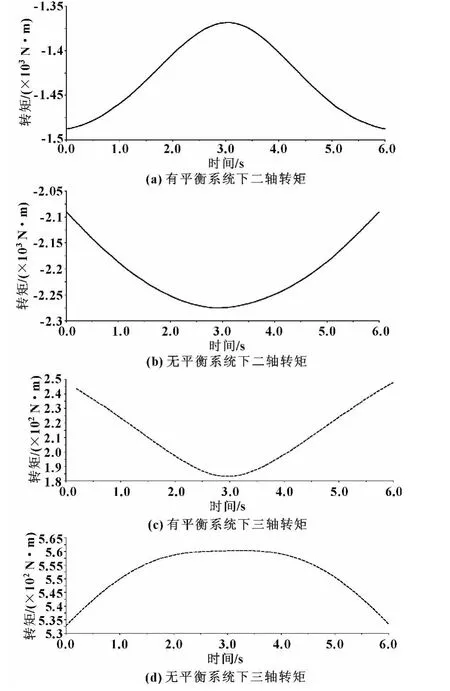
圖14 有無平衡系統二、三軸關節轉矩對比
由以上分析結果可以發現:各軸角速度曲線平滑,角加速度曲線無突變,末端軌跡平滑連續,說明運動平穩。同時可以發現平衡缸彈簧提供了很大的平衡力,在t=3 s時三彈簧平衡力達4 500 N,有效地降低了對二軸電機功率需求。
從圖12、圖13力矩曲線可以看出:在仿真過程中力矩無突變,符合設計要求。各個軸二軸轉矩比較大,最大轉矩1 480 N·m,選用的電機為安川SGMGV-30A3A6C,額定轉矩18.6 N·m,RV減速器減速比100,考慮減速器的功率放大,第二關節力矩值在額定范圍內。圖14是去掉平衡錘后二、三軸關節轉矩曲線對比圖,可以發現:在同樣工況下,有平衡系統時二軸最大轉矩1 480 N·m,而沒有時最大轉矩達到2 275 N·m,沒有平衡系統下三軸轉矩是有平衡系統情況下的二倍多,充分證明了平衡系統的平衡作用非常好。同時還可以發現:在兩種情況下,轉矩曲線的走勢完全相反,這是因為平衡系統在越接近最大載荷位置時所提供的平衡力越大,這樣設計也更合理,能最大限度地減小二、三軸的功率需求。
4 結論
借用SolidWorks和ADAMS搭建了弧焊機器人的動力學仿真模型,并對其進行了動力學行為分析及模擬,通過ADAMS對機械手大臂的動力學仿真,可以校驗其相關設計參數,可以實現對機器人的控制系統進行編程指導,能夠對機械手的運動誤差進行調試,并可以驗證運動控制系統的正確性,降低控制系統的設計難度和縮短開發周期。
通過對機器人進行動力學等方面的分析,可以判斷其機械本體設計方案的合理性,并得出相關動力學參數,為機器人的其他相關控制及研究提供參考和借鑒。還可以通過對機器人在空間中的所有可能經過的路徑進行仿真求解,即機器人無路徑搜索動力學仿真,求出其最大載荷,并結合有限元分析校驗其機械動靜強度。還可以結合MATLAB進行聯合仿真,校驗其控制系統的合理性。通過對機器人的虛擬仿真,可以有效地縮短產品開發周期,降低產品開發費用,同時提高產品質量。
[1]李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2010.
[2]熊有倫.機器人技術基礎[M].武漢:華中科技大學出版社,2002.
[3]林尚揚.焊接機器人及其應用[M].北京:機械工業出版社,2000.
[4]陳立平,張云清,任衛群,等.機械系統動力學分析及ADAMS應用教程[M].北京:清華大學出版社,2005.
[5]劉義翔,李瑞峰,李東婉.應用ADAMS軟件對點焊機器人大臂機構進行動力學仿真研究[J].哈爾濱商業大學學報,2001,1(3):63-66.
[6]衣勇,宋雪萍.機器人仿真研究的現狀與發展趨勢[J].機械工程師,2009(7):63-65.
[7]BALAKIREV N A,GUMAROV G G,ZHIKHAREV V A.Diffusion-limited Aggregation at Multiple Centers:Model of Dendrite Growth at Ion Beam Synthesis of Magnetic Films in External Field[J].Computational Materials Science,2011,50(10):2925-2929.
[8]SUN M Y,CHEN X,DONG S.Dynamic Hysteresis of Magnetic Aggregates with Non-integer Dimension[J].Journal of Magnetism and Magnetic Materials,2009,321(16): 2429-2432.
Mechanical Design and Dynamic Analysis of Six-DOF Robot
ZHOU Huicheng,REN Zhengjun
(School of Mechanical Engineering,Huazhong University of Science and Technology,Wuhan Hubei 430074,China)
The mechanical structure of the robot was designed according to the design requirements,and the solid model was built using SolidWorks,then the systematic dynamics simulation model was built in ADAMS,on the basis of the robot's actual geometrical parameters,physical characteristics and constraint conditions.Through the simulation of space trajectory tracking in the position of maximum load of the robot,the rationality of the design is proved and it provides valuable information for the follow-up research work of optimizing the robot structure and enhancing the control quality.
Six-DOF robot;Mechanical design;Dynamics simulation
TP242
A
1001-3881(2014)9-001-5
10.3969/j.issn.1001-3881.2014.09.001
2013-03-18
國家科技重大專項 (2012ZX04001012;2012ZX04001041);高等學校博士學科點專項科研基金 (新教師基金課題)(20090142120035)
周會成 (1973—),男,博士,副教授,研究方向為數控技術。E-mail:zhouhuicheng@mail.hust.edu.cn。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
山東青年(2016年1期)2016-02-28 14:25:25
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37