工業(yè)機(jī)器人軌跡銜接方法研究
2014-03-09 02:07:06郭霞劉鵬飛段曉妮
機(jī)床與液壓 2014年9期
關(guān)鍵詞:方法
郭霞,劉鵬飛,段曉妮
(1.西安交通大學(xué)城市學(xué)院電器與信息工程系,陜西西安 710018; 2.航天科技集團(tuán)第16研究所,陜西西安 710100)
工業(yè)機(jī)器人軌跡銜接方法研究
郭霞1,劉鵬飛2,段曉妮2
(1.西安交通大學(xué)城市學(xué)院電器與信息工程系,陜西西安 710018; 2.航天科技集團(tuán)第16研究所,陜西西安 710100)
在笛卡爾空間下的機(jī)器人軌跡規(guī)劃中,常用一段“小圓弧軌跡”銜接運(yùn)動(dòng)過程中的前后兩條軌跡,以達(dá)到不用把速度降到0就能平穩(wěn)拐彎的目的。對高速高精度機(jī)器人而言,平穩(wěn)拐彎要求軌跡足夠平滑,而小圓弧過渡方法會(huì)使關(guān)節(jié)的加速度軌跡發(fā)生跳變而影響軌跡的平滑性。針對這一不足,提出用五次多項(xiàng)式插值的方法平穩(wěn)銜接兩條軌跡,推導(dǎo)了該五次多項(xiàng)式系數(shù)矩陣的求解方法。通過仿真驗(yàn)證表明,新方法能使軌跡更加平滑。
工業(yè)機(jī)器人;笛卡爾空間;軌跡銜接;多項(xiàng)式插值
工業(yè)機(jī)器人在笛卡爾空間的運(yùn)動(dòng)軌跡通常有直線(MOVL)、圓弧(MOVC)和樣條曲線(MOVS)。單條軌跡是難以完成任務(wù)的,一項(xiàng)加工作業(yè)往往由多條軌跡順序銜接完成。然而,兩條軌跡在銜接處存在一個(gè)尖角,在機(jī)器人連續(xù)運(yùn)動(dòng)的情況下,這個(gè)尖角易使機(jī)器人產(chǎn)生振動(dòng)。針對這一問題很多學(xué)者提出了改進(jìn)措施。例如,用小圓弧取代這個(gè)尖角[1],用已知的誤差界限求解出第一條直線尾端的拐彎點(diǎn)和第二條直線始端的拐彎點(diǎn),兩拐彎點(diǎn)間用圓弧勻速銜接。文獻(xiàn)[2]用了相似方法并做了改進(jìn),給銜接的圓弧軌跡做了加減速的處理,使運(yùn)動(dòng)軌跡其沿著圓弧切線方向的速度連續(xù)變化。
在高速高精度工況下,不但要求機(jī)器人關(guān)節(jié)的轉(zhuǎn)角和速度連續(xù),為了平穩(wěn),要求關(guān)節(jié)的加速度也是連續(xù)的。但是,圓弧過渡的方法不能使加速度也保持連續(xù),下面進(jìn)行分析。
1 加速度軌跡突變的問題
如圖1所示,圓弧過渡方法以兩條軌跡在拐彎點(diǎn)(圖1中的圓圈)的位置坐標(biāo)和速度矢量為已知條件,用一段圓弧連接兩條軌跡。該方法可以保證機(jī)器人末端軌跡的連續(xù)和速度軌跡的連續(xù)。但是,圓弧運(yùn)動(dòng)需要有向心加速度實(shí)時(shí)地改變其運(yùn)動(dòng)方向,只要在拐彎點(diǎn)處的速度不為零,向心加速度就必須突然存在。也就是說,在由直線末端切入到圓弧時(shí),在切點(diǎn)處必須提供這一向心力,這是突變過程。只有圓弧切向速度為零才可避免向心加速度突變,而用圓弧過渡取代尖角就是為了避免速度降為零,顯然這是矛盾的。
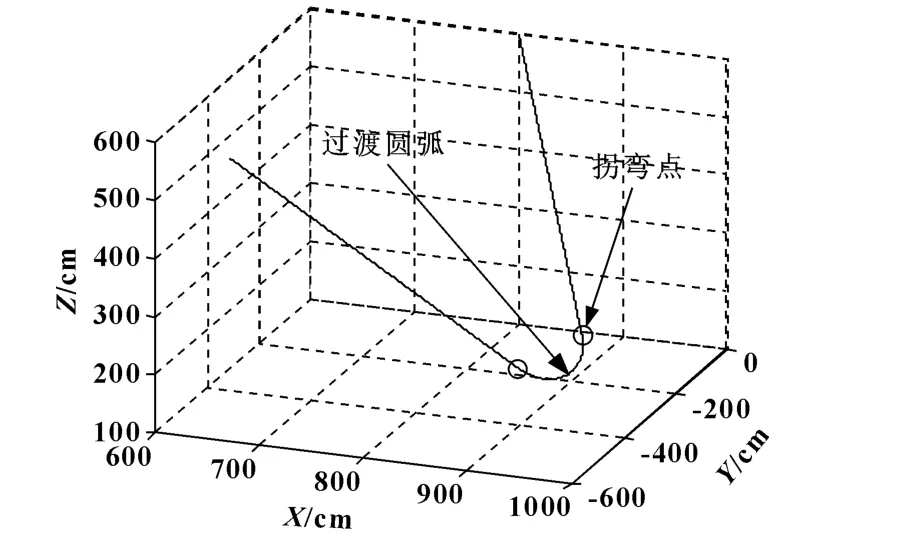
圖1 圓弧過渡軌跡仿真圖
圖2是用圓弧過渡方法銜接兩條直線軌跡時(shí)加速度模值軌跡的變化過程,可以看出加速度在拐彎點(diǎn)產(chǎn)生了突變,這是突然產(chǎn)生的向心加速度。
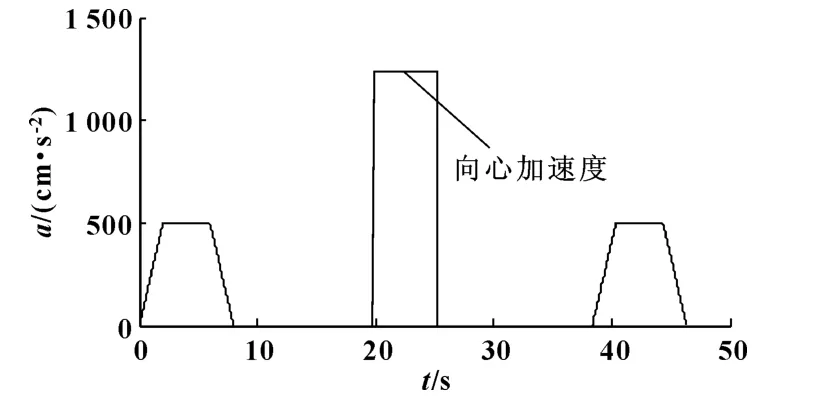
圖2 圓弧過渡過程加速度的變化軌跡
向心加速度的突然出現(xiàn)會(huì)對關(guān)節(jié)空間的軌跡產(chǎn)生怎樣的影響?由于關(guān)節(jié)機(jī)器人正反解的復(fù)雜性,不容易做出定量的分析。但可以確定的是:笛卡爾空間和關(guān)節(jié)空間的映射關(guān)系是連續(xù)的,在笛卡爾空間的加速度突變會(huì)導(dǎo)致關(guān)節(jié)空間加速度的突變。這種突變可能導(dǎo)致兩種結(jié)果,一是關(guān)節(jié)電機(jī)電流過載,二是電機(jī)電流受到上限的限制導(dǎo)致軌跡跟蹤的誤差或振動(dòng)。
2 基于五次多項(xiàng)式插值的軌跡銜接方法
針對加速度軌跡突變的問題,使用基于五次多項(xiàng)式插值的方法來銜接兩條軌跡。下面以“直線-直線”軌跡銜接為例進(jìn)行論述。
如圖3所示,Pe1是第一段直線的拐彎點(diǎn),Pe2的第二段直線的拐彎點(diǎn)。根據(jù)軌跡規(guī)劃算法[3-4]和給出的誤差界限r(nóng)e1=|Pe1-P2|和re2=|Pe2-P2|可以反算出拐彎點(diǎn)Pe1和Pe2的位置、速度和加速度坐標(biāo),它們表示符號分別為Pe1、Pe2、Ve1、Ve2、ae1、ae2,其中Pe1=[xe1ye1ze1]T,其余各量也都為向量表達(dá)式。
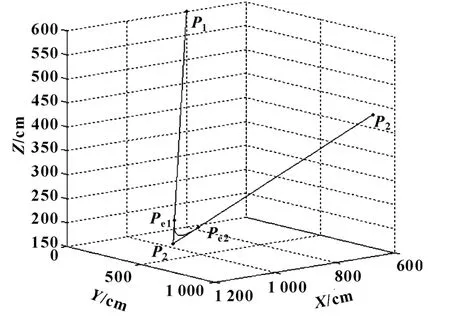
圖3 “直線-直線”銜接示意圖
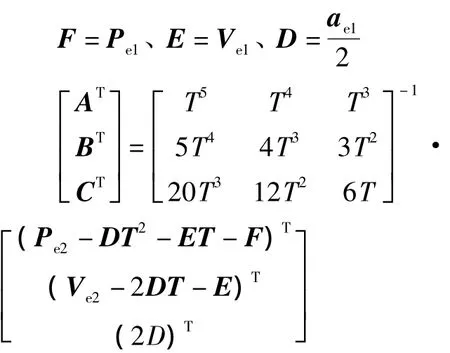
過渡曲線為五次多項(xiàng)式,表達(dá)式表述如下:

為求式中的6個(gè)系數(shù)矩陣A~F,有邊界條件如下:

其中T是過渡軌跡的運(yùn)動(dòng)時(shí)間,可由公式求取:

其中k∈[1.5,3],該參數(shù)可對過渡時(shí)間做微調(diào)。
于是,可以解得各參數(shù)矩陣如下:
假設(shè)機(jī)器人姿態(tài)保持不變,姿態(tài)旋轉(zhuǎn)矩陣為R,基于五次多項(xiàng)式插值的軌跡銜接方法表述如下:
(1)根據(jù)誤差界限r(nóng)e1和re2計(jì)算前后兩段被銜接軌跡的拐彎點(diǎn)的信息Pe1、Pe2、Ve1、Ve2、ae1、ae2;
(2)將拐彎點(diǎn)的信息作為邊界條件求解五次多項(xiàng)式表達(dá)式P(t);
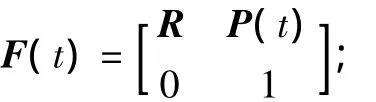
(4)將齊次變換矩陣F(t)反解到獲得關(guān)節(jié)軌跡q(t)。
3 仿真結(jié)果與分析
下面用基于五次多項(xiàng)式插值軌跡銜接的方法對一段“直線-直線”銜接過程進(jìn)行仿真。直線用‘S’型加減速策略[3]。機(jī)器人本體模型選用中國航天科技集團(tuán)第十六研究所的SC-8A型6R垂直關(guān)節(jié)機(jī)器人,該型機(jī)器人的D-H參數(shù)如表1所示,依據(jù)該參數(shù)可以推導(dǎo)出機(jī)器人的正解和逆解,在此不做論述。
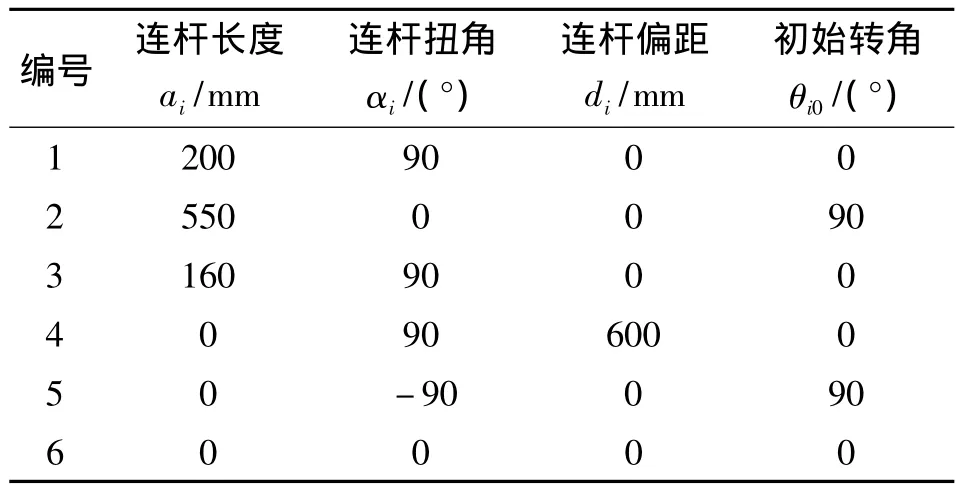
表1 SC-8A垂直關(guān)節(jié)機(jī)器人D-H參數(shù)
兩段被銜接的直線軌跡初始信息如下:
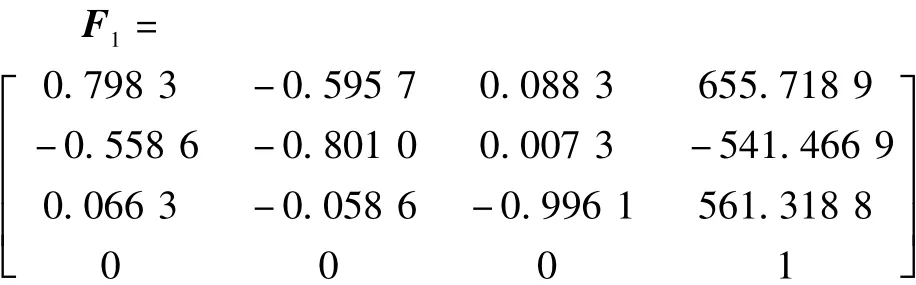
第一段直線軌跡的起始位姿為:
第二段直線軌跡的起始位姿和第一段軌跡的終點(diǎn)位姿F2重合,終點(diǎn)位姿為:
在笛卡爾空間的仿真軌跡如圖3所示。機(jī)器人的姿態(tài)保持不變,運(yùn)用逆解公式將笛卡爾空間下的軌跡變換到關(guān)節(jié)空間下得到6個(gè)關(guān)節(jié)的變化軌跡如圖4(a)所示。
上述的兩條直線軌跡分別用基于五次多項(xiàng)式插值的過渡方法和小圓弧過渡的方法做銜接比較,仿真結(jié)果如圖4—6所示。其中,圖4為機(jī)器人6個(gè)關(guān)節(jié)轉(zhuǎn)角軌跡的對比,圖5為機(jī)器人6個(gè)關(guān)節(jié)速度軌跡的對比,圖6為機(jī)器人6個(gè)關(guān)節(jié)加速度軌跡的對比。從圖4和圖5中可以看出,兩種方法下的關(guān)節(jié)轉(zhuǎn)角軌跡和關(guān)節(jié)速度軌跡都滿足連續(xù)性要求;在圖6中,用小圓弧過渡方法的關(guān)節(jié)加速度軌跡在銜接階段出現(xiàn)了明顯突變,而用基于五次多項(xiàng)式插值的過渡方法的關(guān)節(jié)加速度軌跡連續(xù)性很好。
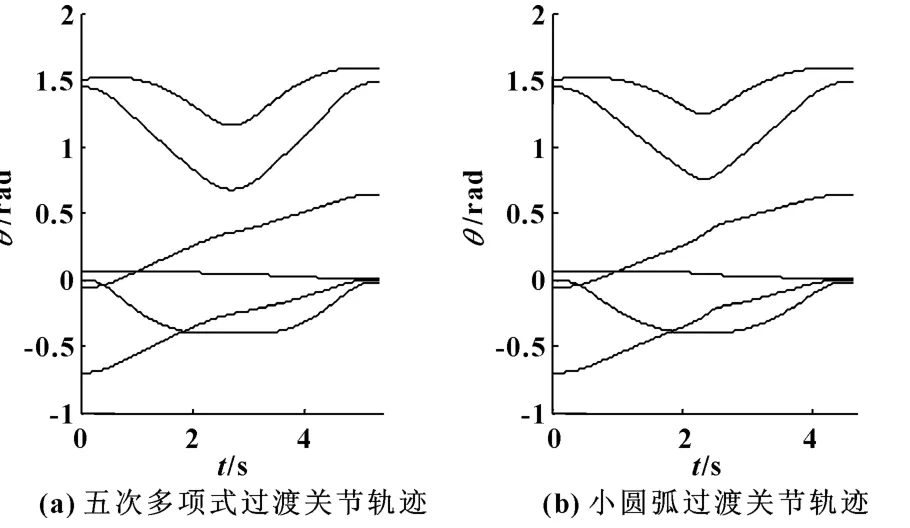
圖4 兩種過渡方法關(guān)節(jié)軌跡對比

圖5 兩種過渡方法關(guān)節(jié)速度對比
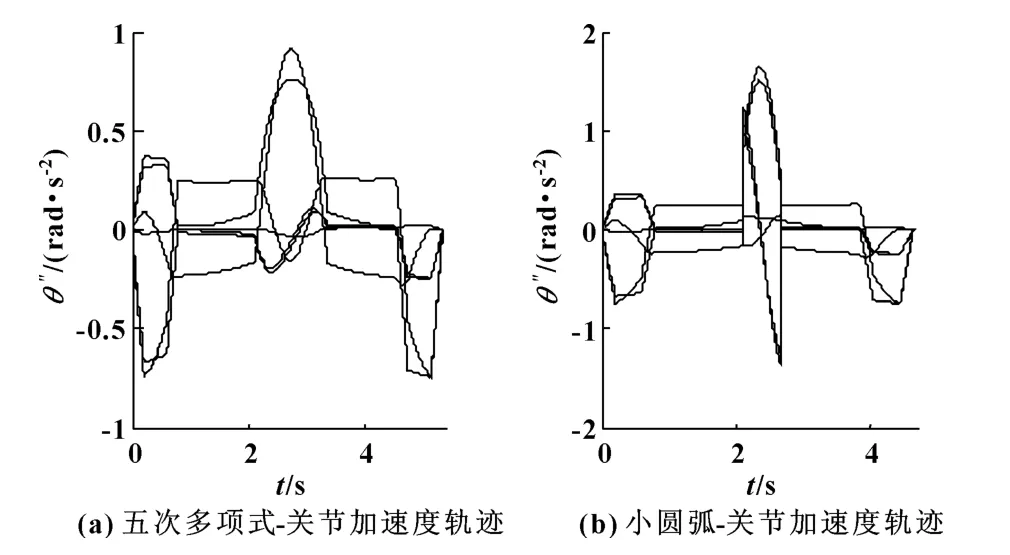
圖6 兩種過渡方法關(guān)節(jié)加速度對比
4 結(jié)論
用五次多項(xiàng)式插值的方法可以平穩(wěn)銜接兩段笛卡爾軌跡,銜接過程關(guān)節(jié)的角度、角速度、角加速度均保持平滑。關(guān)節(jié)角加速度與關(guān)節(jié)電機(jī)的電流呈正比關(guān)系,平滑的角加速度可使關(guān)節(jié)電機(jī)工作在更加柔和的運(yùn)動(dòng)控制指令下。在軌跡平滑性要求較高的應(yīng)用場合,如高速、高精度機(jī)器人,具有很好的實(shí)用性。
[1]陳偉華.工業(yè)機(jī)器人笛卡爾空間軌跡規(guī)劃研究[D].廣州:華南理工大學(xué),2010:37-41.
[2]藍(lán)培欽.碼垛機(jī)器人控制系統(tǒng)軟件的設(shè)計(jì)和研究[D].上海交通大學(xué)碩士學(xué)位論文.2010.2:45-48.
[3]TAYLOR R.Planning and Execution of Straight Line Manipulator Trajectories[M].Robot Motion,Brady et al.Editors,MIT Press,Cambridge,MA,1983:424-436.
[4]PAUL R.Manipulator Cartesian Path Control[J].IEEE Transactions on Systems,Man,and Cybernetics,1979,9 (11):703-711.
[5]劉鵬飛,楊孟興,宋科,等.‘S’型加減速曲線在機(jī)器人軌跡插補(bǔ)算法中的應(yīng)用研究[J].制造業(yè)自動(dòng)化,2012,34(10):4-8.
Study about Trajectories Connecting Method of Industry Robot
GUO Xia1,LIU Pengfei2,DUAN Xiaoni2
(1.Xi'an Jiaotong University City College,Xi'an Shaanxi 710018,China; 2.The 16thInstitute,China Aerospace Science and Technology Corporation,Xi'an Shaanxi 710100,China)
In the trajectory planning of industry robot in Cartesian space,a small“arc-curve”is always used to connect two trajectories in order to change the moving direction smoothly without decreasing velocity down to zero.It requires trajectory smooth enough to turn the direction during a high-speed and high-precision operation of industry robot.However,the small“arc-curve”would bring mutations to the trajectory of acceleration.To avoid such disadvantage,a new connection method based on 5th-order polynomial interpolation was proposed,and some derivations which showed how to compute the coefficient matrix of the polynomial were listed.The simulation attests that the new method connects two trajectories more smoothly.
Industry robot;Cartesian space;Trajectory connection;Polynomial interpolation
TP242
A
1001-3881(2014)9-010-3
10.3969/j.issn.1001-3881.2014.09.003
2013-05-07
國家戰(zhàn)略性新興產(chǎn)業(yè)高端裝備專項(xiàng)([2012]432號)
郭霞 (1980—),女,碩士,研究方向?yàn)橹悄芸刂啤Mㄐ抛髡?劉鵬飛,E-mail:lpf_8748@yahoo.com.cn。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56