基于MATLAB/Simulink的進給系統(tǒng)機械剛度的仿真分析
2014-03-09 02:07:56尹明國蘭蘭
機床與液壓 2014年9期
尹明,國蘭蘭
(內蒙古科技大學機械工程學院,內蒙古包頭 014010)
基于MATLAB/Simulink的進給系統(tǒng)機械剛度的仿真分析
尹明,國蘭蘭
(內蒙古科技大學機械工程學院,內蒙古包頭 014010)
機械剛度是反映機械結構抵抗變形的能力。如果傳動機構的剛度不足,必然會使傳動機構產生彈性變形,影響系統(tǒng)的定位精度、動態(tài)穩(wěn)定性和響應的快速性。主要應用Simulink軟件仿真分析機械傳動機構中扭轉剛度和軸向剛度對進給系統(tǒng)運動穩(wěn)定性的影響,仿真結果表明:機械剛度中的軸向剛度對進給系統(tǒng)平穩(wěn)性的影響要遠大于扭轉剛度,所以應著重通過提高軸向剛度來抑制剛度不足引起的進給運動的不平穩(wěn)。
機械剛度;進給系統(tǒng);MATLAB/Simulink仿真
機電綜合傳動剛度是衡量數(shù)控機床傳動系統(tǒng)抵抗軸向變形能力的重要指標,該指標是設計數(shù)控機床定位精度的依據(jù)。進給系統(tǒng)的綜合等效傳動剛度包括等效扭轉剛度 (文中主要考慮滾珠絲杠的扭轉剛度)和等效軸向剛度,其中等效剛度主要包括滾珠絲杠的軸向剛度、滾珠絲杠螺母副的接觸剛度、支承軸承的軸向剛度以及螺母座和軸承座的軸向剛度。所以進給伺服系統(tǒng)傳動鏈的合理設計是保證數(shù)控機床具有好的穩(wěn)定性、高精度以及高可靠性的必要條件。
1 進給系統(tǒng)仿真模型的建立
進給系統(tǒng)的結構簡圖見圖1。

圖1 進給系統(tǒng)的結構簡圖
1.1 交流伺服電機的數(shù)學模型
忽略鐵芯的飽和與電機組漏感,假設產生的反電動勢是正弦的,勵磁壓力沒有高次諧波,運用坐標變換理論,再按轉子磁場定向并使id=0的PMSM矢量控制,可以建立永磁同步電動機的數(shù)學模型,如下:
電壓方程

電磁轉矩方程

機械運動方程

式中:ud、uq分別為經過d、q軸變換后等效電壓;id、iq分別為d、q軸等效的電流;Ld、Lq分別為d、q軸的等效電感;R為電機內部等效電阻;ψf為永磁體產生的恒定磁通;ωr為轉子旋轉角速度 (電角度表示);Pn為電機的極對數(shù);Te為PMSM電磁轉矩;TL為電機軸上的負載轉矩;Cm為電機的等效阻尼系數(shù);Jm為電機的轉動慣量;ω為轉子機械角速度。
1.2 機械傳動部分的數(shù)學模型
其轉矩平衡方程:

在彈性的線性變形范圍內有:

工作臺的動力學平衡方程為:

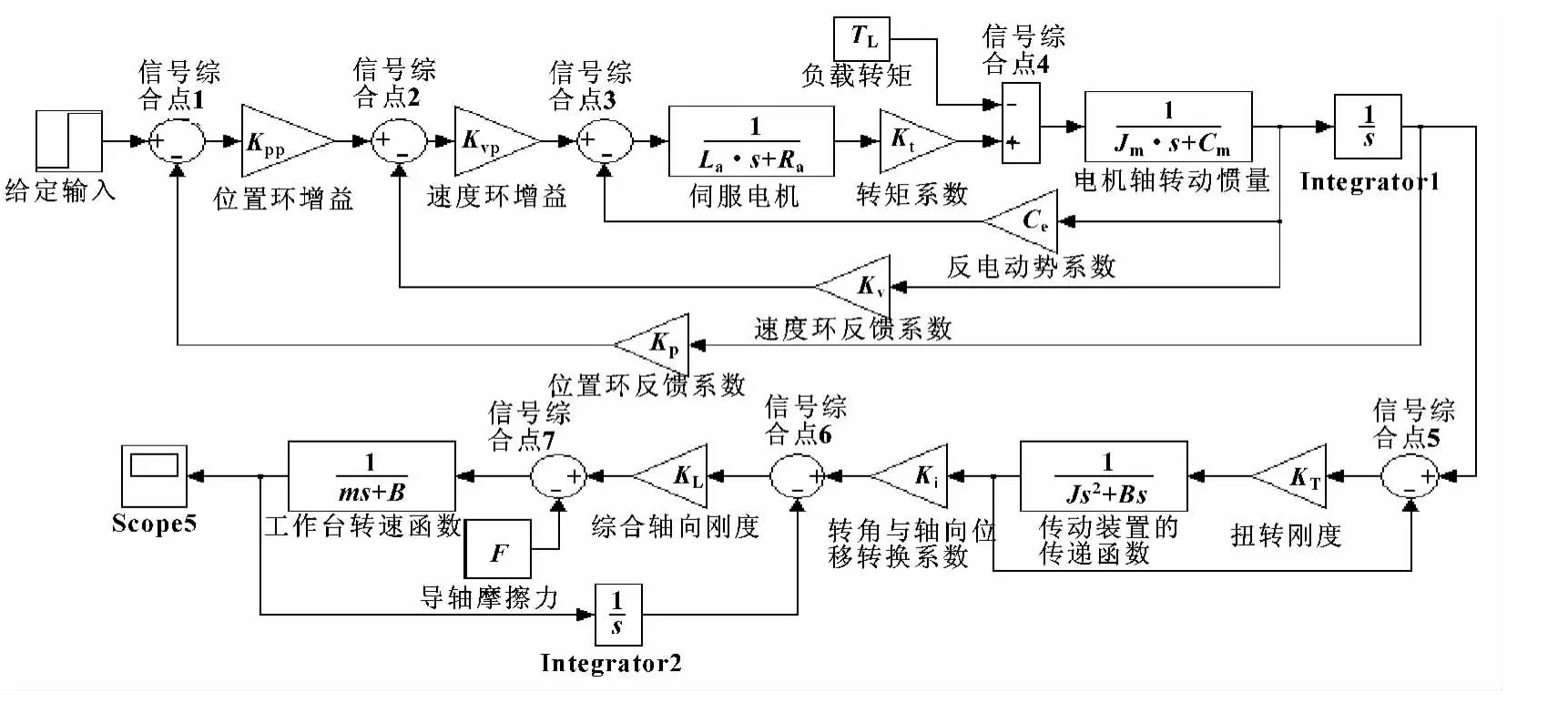
圖2 進給系統(tǒng)的Simulink仿真模型
式中:J為執(zhí)行部件與各傳動部件歸算到絲杠上的轉動慣量(kg·m2);
B、C分別為絲杠和工作臺等效黏性阻尼系數(shù);θs(t)為傳動機構的輸出角位移;
KT為滾珠絲杠的扭轉剛度 (N·m/rad);
Ms(t)為機械傳動機構的輸入轉矩;
Mg(t)為負載轉矩;F為導軌摩擦力;
KL為折算到工作臺的等效軸向剛度。
根據(jù)式(1)—(6)建立的進給系統(tǒng)的Simulink仿真模型如圖2所示。

圖3 等效軸向剛度變化時工作臺的速度曲線
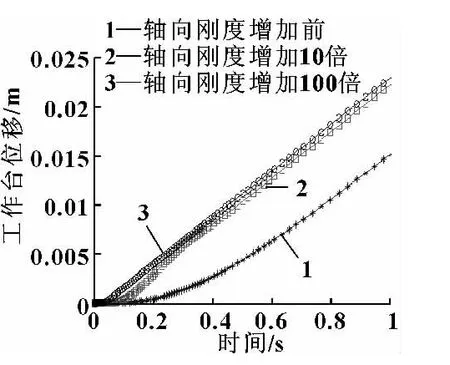
圖4 等效軸向剛度 變化時工作臺 的位移曲線
2 仿真分析
以某數(shù)控車床進給系統(tǒng)為研究對象,其仿真參數(shù)如表1所示,仿真中主要分析扭轉剛度和軸向剛度對進給系統(tǒng)運動穩(wěn)定性的影響,仿真結果如圖3—8所示。
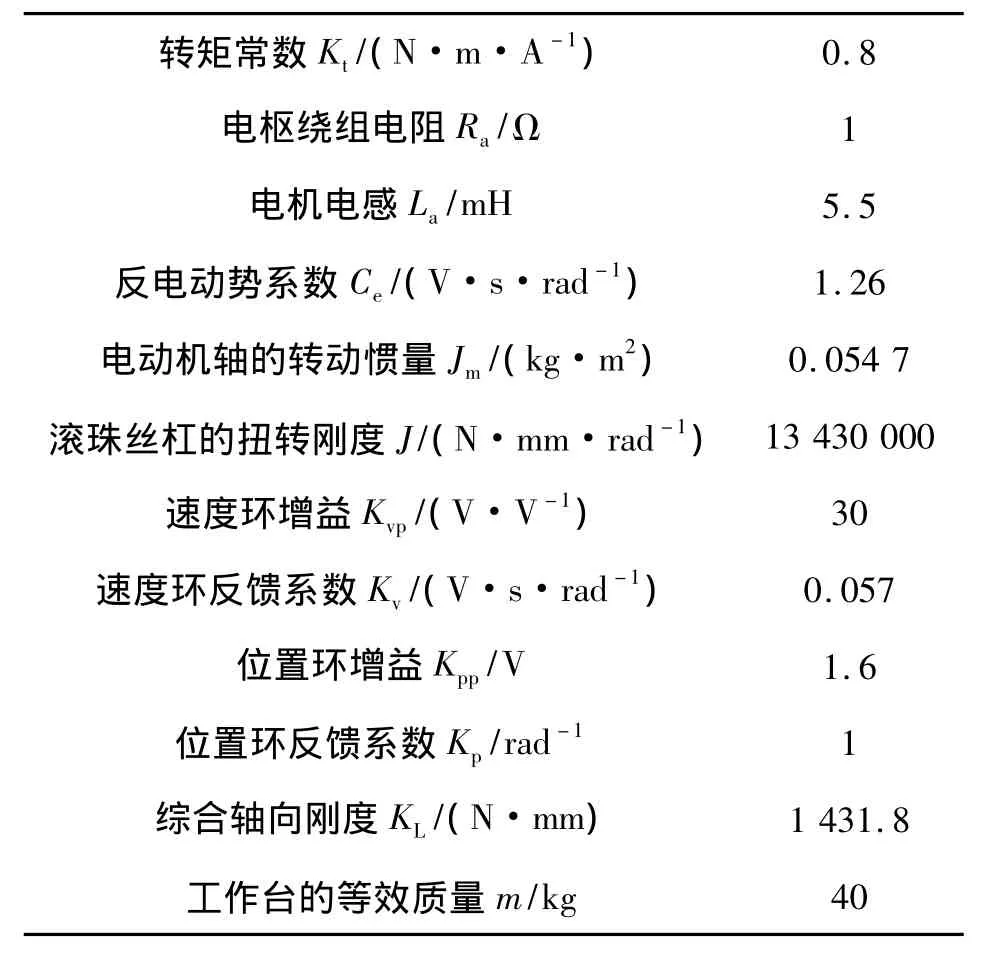
表1 仿真參數(shù)
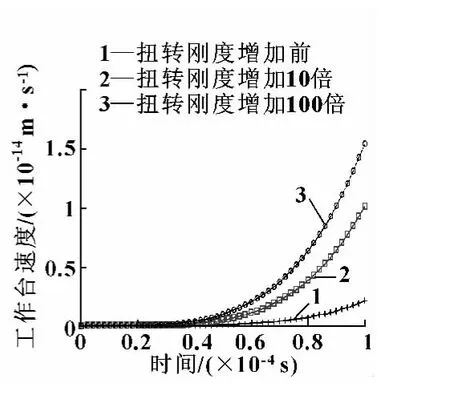
圖6 扭轉剛度變化 時速度曲線 局部放大圖
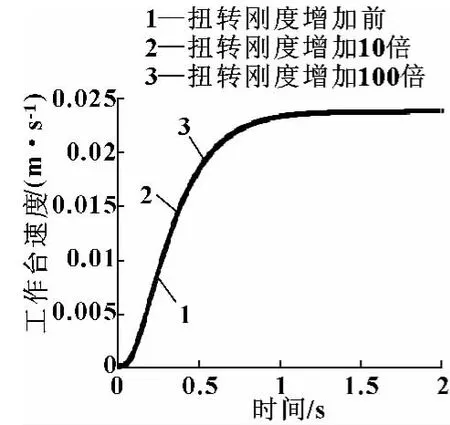
圖5 扭轉剛度變化時工作臺的速度曲線
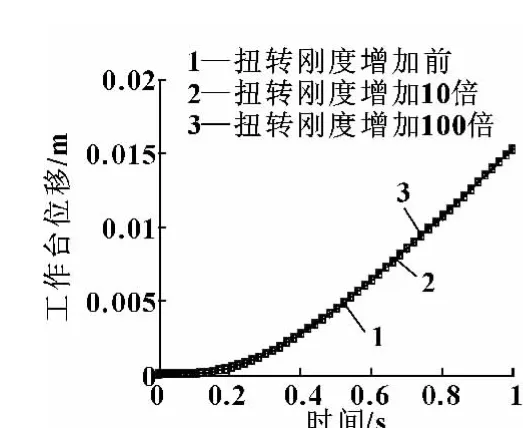
圖7 扭轉剛度變化時工作臺的位移曲線

圖8 扭轉剛度變化時位 移曲線局部放大圖
從圖3—4可以看出:在其他參數(shù)不變的情況下,等效軸向剛度增加10倍時,工作臺的輸出速度曲線出現(xiàn)了超調和振蕩,但是由于阻尼的存在,振蕩逐漸衰減,一定時間后達到恒速的穩(wěn)定狀態(tài),而且軸向剛度的增大很明顯縮短了工作臺的響應時間。當?shù)刃лS向剛度增加100倍,即軸向剛度足夠大時;雖然工作臺速度也出現(xiàn)了振蕩現(xiàn)象,但是其振蕩的超調量減小,且在很短的時間達到穩(wěn)態(tài),同時工作臺的速度調整時間明顯縮短,工作臺的輸出位移的上升時間也大大減少,位移曲線是一條直線。從而可以得出以下結論:等效軸向剛度的增加大大降低了工作臺爬行現(xiàn)象的產生,提高了系統(tǒng)的運動穩(wěn)定性。
從圖5—8可以看出:保持其他參數(shù)不變,扭轉剛度增加10倍和100倍時,工作臺的輸出速度和輸出位移變化極其微小,因此滾珠絲杠扭轉剛度的增大對提高進給系統(tǒng)運動穩(wěn)定性的作用非常小。
3 結束語
通過對機械剛度的仿真分析可以總結出以下結論:其他參數(shù)不變的情況下,等效軸向剛度的大小對提高系統(tǒng)運動穩(wěn)定性的作用遠大于滾珠絲杠扭轉剛度,因此當由于傳動鏈剛度不足引起數(shù)控機床產生爬行現(xiàn)象時,應著重考慮通過增加滾珠絲杠的等效軸向剛度來減小傳動鏈剛度對系統(tǒng)運動的影響,這樣才能更有效地降低機床爬行現(xiàn)象的產生,提高系統(tǒng)的運動平穩(wěn)性,進而提高機床的加工精度和運動穩(wěn)定性。
[1]尹明.數(shù)控機床工作臺與導軌部件對進給爬行的影響[J].制造技術與機床,2007(11):53-55.
[2]陳庚順.基于MATLAB的數(shù)控車床進給系統(tǒng)的建模與仿真[J].中北大學學報:自然科學版,2008(4):327-332.
[3]劉麗蘭,劉宏昭,吳子英,等.低速下機床進給伺服系統(tǒng)穩(wěn)定性研究[J].振動與沖擊,2010,25(5):187-190.
[4]尹明,張曉鋒.數(shù)控機床進給系統(tǒng)產生爬行的機理分析[J].機床與液壓,2007,35(12):82-83.
[5]吳南星,余冬玲.數(shù)控機床伺服進給系統(tǒng)綜合模型的探討[J].機床與液壓,2008,36(8):66-68.
[6]鄒艷,王志彥.伺服進給系統(tǒng)綜合拉壓剛度的理論分析[J].現(xiàn)代制造技術與裝備,2006(3):20-21.
Mechanical Rigidity Simulation of Feed System Based on MATLAB/Simulink
YIN Ming,GUO Lanlan
(Mechanical Engineering School,Inner Mongolia University of Science&Technology,Baotou Inner Mongolia 014010,China)
Mechanical stiffness reflects the ability to resist deformation of the mechanical structure.In the low speed or overloading,the system stiffness deficiency can cause creep phenomenon of machine tool,thereby the positioning precision,dynamic stability and response speed of the machine tool are reduced.Simulink simulation analysis was used to analyze the influences of torsional stiffness and axial stiffness of mechanical transmission mechanism on the movement stability of feed system.The simulation results show that the effect of the axial mechanical stiffness on the stability of the feed system is much greater than that of the torsional stiffness.So the way that through increasing axial stiffness to control movement unstability caused by insufficient stiffness should be paid more attention.
Mechanical stiffness;Feed system;MATLAB/Simulink simulation
TB113.2
A
1001-3881(2014)9-151-3
10.3969/j.issn.1001-3881.2014.09.042
2013-03-28
尹明 (1960—),男,工學碩士,高級工程師,研究方向為數(shù)控技術及應用。E-mail:yinming@imust.cn。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45