面向廣域阻尼控制的電力系統降階辨識研究
2014-03-19 08:31:22,,,
四川電力技術 2014年1期
, , ,
(1.國網四川省電力公司,四川 成都 610041;2.國家電網公司,北京 100031)
0 引 言
大區電網互聯的形勢下,低頻振蕩問題已成為限制省間和區間功率傳輸極限的瓶頸,即使安裝了大量傳統的勵磁附加阻尼控制器(power stability stabilizer,PSS),區間低頻振蕩問題仍然沒有得到有效解決[1]。廣域測量技術的發展和普及使得采用廣域信號作為阻尼控制的輸入信號成為可能,研究表明[1],對于抑制區間低頻振蕩,廣域阻尼控制與本地阻尼控制相比具有明顯優勢。
在廣域阻尼控制中,傳統PSS設計中所采用的單機無窮大系統的假設已經不再適用。學者們陸續提出了基于極點配置、最優控制及魯棒控制等現代控制理論的廣域阻尼控制器設計方法,然而這些方法都要基于系統模型,因此系統模型的獲取是設計廣域阻尼控制器的關鍵。降階辨識方法為獲取電力系統控制器設計可用的模型提供了一種有效手段。
系統辨識的方法眾多,基于模型的方法主要有預報誤差法(prediction error method, PEM)和子空間辨識法兩種,對于系統辨識的算法實現、辨識的收斂性和一致性、辨識誤差的分布、模型的定階方法以及辨識實驗的最優激勵信號和最優預濾波器設計方法,L. Ljung在其經典巨著[2]中做了系統的總結。相比之下電力系統中面向控制的辨識研究開展的較少,I. Kamwa在這方面做了很多先驅性的工作,他采用子空間辨識等方法為電力系統MIMO控制器設計提供模型,獲得了很好的仿真效果[3]。文獻[4]采用PEM辨識方法獲得了系統模型,并在此基礎上進行了MIMO最優控制器設計。系統辨識方法在電力系統中應用的同時,在降階原理及方法體系方面還有待研究,包括:① 電力系統面向阻尼控制器設計的可降階原理:電力系統的階數有成千上萬階,可以用幾階到十幾階的模型來表示的原因;降階的誤差分析;降階模型階數的確定等等; ② 電力系統的降階辨識方法體系:電力系統辨識可用的方法;面向廣域阻尼控制誤差度量;辨識實驗的激勵信號、預濾波器設計等等。
1 電力系統的可降階原理與降階誤差分析
1.1 模式可控可觀性與系統降階
電力系統線性模型可以表示成解耦狀態方程[6]為
(1)
y=C′z
(2)

此時系統可表示成

(3)
(4)
經過矩陣行變換,式(4)與式(5)的特征值相同為
(5)
其中,P為行變換矩陣。注意到,式(5)所示矩陣即式(6)所示系統的閉環狀態矩陣。
(6)
式(6)所示系統由不受控和受控兩解耦的子系統構成,其中受控的子系統不含有與不可控模式相關的狀態變量,因此其階數是原系統的階數減去不可控的模式數。控制器設計可針對該受控子系統進行,與在原系統上設計控制器是等同的。
由上述分析可知,當系統存在不可控的模式時,對于控制器設計而言,可以對系統進行降階,降階后的系統不含有不可控的模式。由對偶原理可知,當存在不可觀的模式時,系統同樣也可以被降階。上述證明是在控制器為比例環節的假設下完成的,對于一般情況,通過將控制器表述成狀態方程形式與系統的解耦狀態方程聯立,通過類似的證明過程可以得到相同的結論,此處從略。
當存在不可控或不可觀的模式時,對于控制器設計而言,被控系統可以被降階而不損失有用的信息。由此可以推想,當存在可控可觀性相對很弱的模式時,在承受一定的誤差的前提下,也可以對被控系統進行降階。后一種情形在電力系統中更為常見。對于阻尼控制器設計而言,以PSS設計為例,雖然電力系統階數很高,但是單臺發電機參與的模式有限,且本地反饋信號也只對本地模式和部分區間模式可觀性較強,因此對于PSS的設計而言,其對于系統的大部分模式是不可控不可觀或者極弱可控、可觀的,因此可以對系統進行大規模的降階。
引入廣域信號作反饋后,由于信號的選擇不受限制,可以挑選對區間模式具有強可觀性的信號,且由于控制點和反饋信號的選擇可以分離,對控制點可控的本地模式,可以選擇反饋信號使之不可觀,使得控制器既可控又可觀的模式集中在區間振蕩模式,從而可以進一步降低系統的階數。
1.2 降階模型的誤差
考慮單輸入單輸出系統G(s)。G(s)的傳遞函數可寫成如下形式(假設特征方程無重根)。
(7)

(8)
當Rr+1=Rr+2=…=Rn=0,自然有Gr(s)=G(s)。
如果Rr+1≠0,降階會帶來誤差。該誤差為
(9)
該誤差是被舍去的模式所引入的誤差之和。模型誤差可以用H∞范數和H2范數來評估。
用H∞范數來評估模型誤差,可以考察模型誤差的幅頻響應的峰值。模式λi在G(s)中對應的項為Ri/(s-λi),該項在頻域上的最大幅值為|Ri|/|αi|,舍去該模式所帶來誤差的H∞范數即為|Ri|/|αi|。由于各模式對應幅頻上的峰值不出現在同一頻率,因此式(9)所示誤差范數的上限和近似的下限為
(10)
該上限保守性太強,下限更接近誤差的真實值。用H2范數來評估模型誤差,可以反映在整個頻譜范圍內誤差的總體大小,同時也對應模型與實際系統間單位沖激響應之差的能量。
模式λi對應項Ri/(s-λi)的H2范數平方為[5]
(11)
由于單位沖激脈沖響應的總能量近似等于各模式能量的和,式(9)所示誤差的H2范數可近似由式(12)表示。
(12)
無論是范數還是范數下的誤差表示都反映出,舍去留數小且阻尼大的模式所帶來的模型誤差較小。誤差的大小是相對的,誤差范數相對于系統范數的相對大小更能準確地評價模型的質量。
1.3 基于降階原理和BIC準則的模型定階方法
模型定階是辨識過程中非常重要的一環。令辨識的相對誤差小于ε0,由降階原理做出的模型階數估計由式(13)給出。
‖ΔGr(s)‖≤ε0‖G(s)‖≤‖ΔGr+1(s)‖
(13)
其中,‖·‖可以是H∞范數或H2范數,‖ΔGr(s)‖的計算公式由式(9)、(10)和(11)給出,隨著階數的增加單調遞減。‖G(s)‖為系統的總范數。
采用降階理論給出了階數的估計后,在辨識過程中再采用傳統的定階準則來做調整和校核。傳統的BIC定階準則[87]為
BIC(p)=NlnVN+plnN
(14)
其中,p為模型階數;N為采樣點數;VN為預報誤差的方差。該準則包含了對擬合精度的評價和對模型階數的懲罰兩部分。降階原理與BIC準則的結合,賦予了定階方法清晰的物理意義,改變了傳統BIC等方法依賴辨識擬合程度大量試算的局面。
2 電力系統的降階辨識實驗設計
降階的可行性是用低階模型來辨識系統的基礎。系統辨識常用方法主要有預報誤差法和子空間辨識法兩大類[2],其中預報誤差法使用最為廣泛,并可用于閉環辨識。這里以預報誤差法為例討論辨識實驗中的激勵信號和預濾波器設計。
待辨識的系統如下表示。
y(t)=G0(q)u(t)+H0(q)e(t)
(15)
其中,q是移位算子;G0是被控系統;u是激勵信號輸入;y是測量輸出;e是方差為λ0的白噪聲;H0是噪聲模型。辨識模型與實際系統間總會存在誤差,其大小可以用模型與實際系統之差的方差和偏差來評價,定義模型品質度量的準則函數[2]為
(16)
其中,G(ejω,θ)為辨識模型的頻域表示;C(ω)為品質加權函數,對應在不同頻率段對辨識精度的不同要求。J(θ)近似可分解為“方差貢獻”JV(θ)與“偏差貢獻”JB(θ)之和。對于開環辨識情況,JV(θ)可表示為[2]
(17)
其中,n是模型階數;N是采樣數據點數;Φv(ω)為辨識中噪聲的功率譜,有Φv(ω)=λ0|H0(ejω)|2Φu(ω)為激勵信號的功率譜。
為使得JV(θ)最小,最優激勵信號設計[2]為
(18)
其中,μ是可調常數。為使得偏差貢獻項JB(θ)最小,應滿足式(19)[2]。
Φu(ω)|L(ejω)|2/|H(ejω,θ*)|2=kC(ω)
(19)
其中,H(ejω,θ*)為N趨于無窮時噪聲模型的收斂值;k是可調常數。
對于以廣域阻尼控制器設計為目的的電力系統降階辨識,推導相應的品質加權函數C(ω)如下。
廣域阻尼控制器的參考信號一般為零,系統的輸入和輸出滿足如下方程。
u(t)=-K(q)y(t)
y(t)=G0(q)u(t)+v
(20)
其中,K為反饋控制器;v代表外部擾動。系統只受外部擾動激勵;y=S0v,S0為輸出靈敏度函數,S0=1/(1+G0K)。令R(q)為
R(q)=G(q,θ)/〔1+G(q,θ)K(q)〕
(21)

(22)
為使得設計系統輸出逼近實際系統輸出,必須極小化目標函數為
J(G)=
(23)
對比式(16),可知此時的C(ω)為
(24)

(25)
(26)
以上激勵信號和預濾波器的設計方法在實際應用中顯得非常復雜,式(18)和(26)給出了一個結論:在辨識精度要求高的頻率段,激勵信號譜和預濾波器幅頻響應都應該具有更大值。由于辨識出的模型會用于設計控制器以阻尼低頻振蕩,C(ω)在低頻段會有更大的值,一種實用的簡化設計方法是把激勵信號譜和預濾波器設計成低通的形式,將截止頻率設置在一般振蕩的最高頻率2 Hz左右。
設計出激勵信號的譜后,濾波后的高斯白噪聲是一種頻域和時域特性都較為理想的激勵信號實現方式,此外還需要結合對激勵信號的幅值和能量的限制來確定可調系數μ[2]。
3 仿真算例分析
仿真算例在四機兩區系統上進行,仿真工具為Matlab,系統如圖1所示,各元件參數與文獻[6]相同。
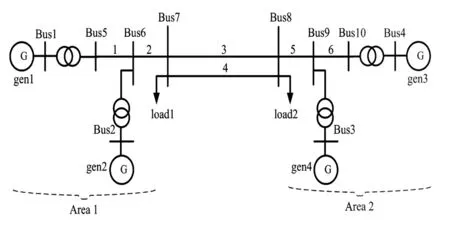
圖1 四機兩區系統示意圖
每臺發電機都配備勵磁和調速系統,系統共54階。以發電機4的勵磁參考電壓為控制點,分別以機端功率和區域1與區域2間的交換功率作為反饋信號,考查面向本地控制和廣域控制的電力系統可降階情況。分析的結果見表1,為簡化篇幅,省略了大量無關緊要的左半平面實軸上的非振蕩模式。
由表1可知,系統有3個弱阻尼的機電振蕩模式,其中0.557 7 Hz模式為區間振蕩模式,1.104 9 Hz模式為G3/G4間的本地振蕩模式,1.131 6 Hz模式為G1/G2間的本地振蕩模式;其他模式為阻尼情況很好的控制器及磁鏈模式。G4對于G3/G4本地模式及區間模式的可控性較強,對于G1/G2的本地振蕩模式可控性很差,且對于大量與G4不相關的控制器/磁鏈模式不具有很強的可控性;同樣G4機端功率信號對于G1/G2模式的可觀性很差,且對于大部分控制器/磁鏈模式基本不具有可觀性;相比本地信號,廣域的區域交換功率信號的模式可觀性基本集中在區間振蕩模式,對于其他本地模式及控制器/磁鏈模式的都基本不可觀。
結合前述基于模式可控可觀性的可降階原理可知,此系統可以實現大規模的降階來簡化控制器的設計。以模型誤差10%為限,用H2范數來評估誤差,本地控制需要保留的模型階數為8階,廣域控制為3階;用范數評估誤差,本地控制需要保留的模型階數為10階,廣域控制為4階。該分析結果表明,降階的程度與控制點和反饋信號的選擇相關,而對電力系統的大規模降階是可行的。
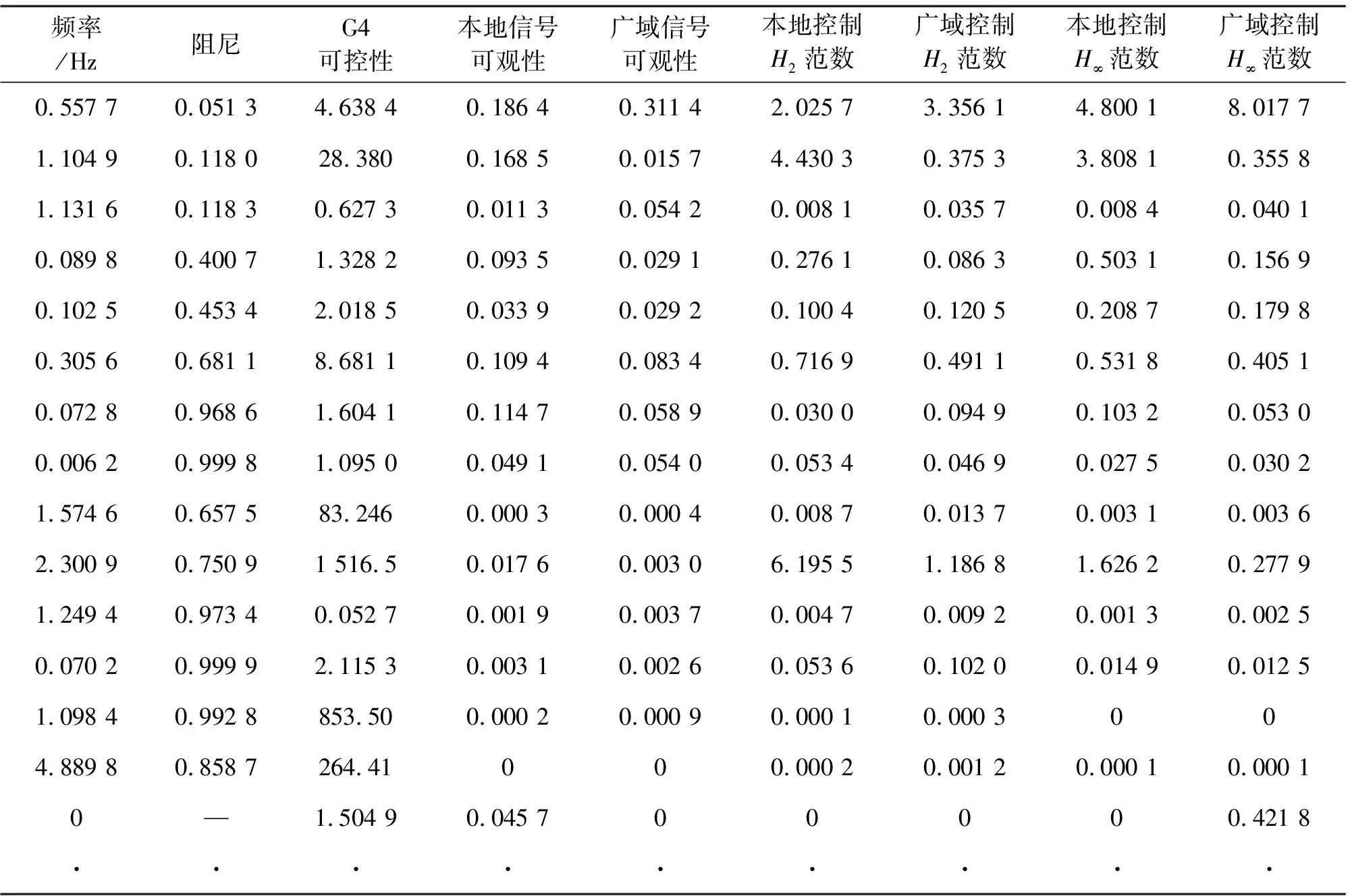
表1 四機兩區系統模式可控可觀性分析
采用PEM的方法辨識從控制點到廣域反饋信號的被控系統模型,采樣率為10 Hz,仿真時長為40 s。由于實際系統模型未知,因此首先將激勵信號譜和預濾波器設計成低通的形式,截止頻率為2 Hz,激勵信號選用濾波后的高斯白噪聲,濾波器為二階巴特沃茲低通濾波器,衰減率取為0.707。辨識得到的各階模型擬合度如表2所示。
由上述基于降階原理的估計可知,采用3階模型已能較好地擬合系統。從表2可以看出,隨著模型階數從3階上升到11階,模型的擬合精度并沒有顯著提高,這反映了降階理論對模型階數做出的估計是合理的。辨識出的3階模型含有一對頻率為0.58 Hz、阻尼比為5.47%的極點,與表1的小干擾分析結果基本相同。根據BIC準則進行最后的校驗,確定模型的階數為3階。

表2 不同模型階數下的擬合度
根據辨識的3階模型采用極點配置的方法[6]設計出廣域阻尼控制器,與本地PSS控制相比較,控制效果如圖2所示,其中PSS參數由文獻[6]給定。可見,與本地PSS控制相比,廣域阻尼控制對于區間低頻振蕩的阻尼更強,該算例同時也表明廣域阻尼控制器的設計可以基于降階辨識模型進行。
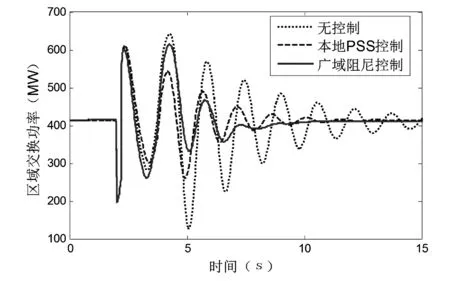
圖2 根據辨識模型設計廣域阻尼控制器的控制效果
根據辨識出的系統模型和噪聲模型,以及所設計的控制器,按照式(25)和式(26)重新設計得到如圖3所示最優輸入信號譜和最優預濾波器幅頻特性。
兩者都具有明顯的低通特性,在主導振蕩頻率0.58 Hz及以下頻率有較大值,截止頻率在0.8 Hz左右,比本辨識實驗中采用的截止頻率2 Hz略低。可見,由于電力系統呈低通特性,且低頻振蕩頻率小于2 Hz,因此將輸入信號譜和預濾波器設計為低通特性,截止頻率取為高于低頻振蕩頻率,是一種適用性較強的設計方案。
4 結 論
電力系統降階的可行性是能夠用低階模型來辨識系統的基礎。基于模式可控可觀性分析,提出了面向廣域阻尼控制器設計的電力系統可降階原理,并提出了H∞/H2范數下的降階誤差分析方法,以及降階原理估計和BIC準則結合的模型定階方法。進一步地,針對廣域阻尼控制器設計,提出了辨識實驗中的最優激勵信號和最優預濾波器設計方法,并指出采用具有低通特性的激勵信號譜和預濾波器是一種實用的設計方案。四機兩區系統上進行的仿真表明了上述方法和理論的有效性。
[1] 謝小榮, 肖晉宇, 童陸園,等. 采用廣域測量信號的互聯電網區間阻尼控制[J]. 電力系統自動化, 2004, 28(2):37-40.
[2] Lennart Ljung. System Identification——Theory for the User(2nd ed)[M]. USA: Prentice Hall, 2002.
[3] Kamwa I, Luc Gerin-Lajoie. State-space System Identification-toward MIMO Models for Modal Analysis and Optimization of Bulk Power Systems[J] . IEEE Trans. on Power Systems, 2000, 15(1):326-335.
[4] Lu Chao, Li Licheng, He Jingbo, et al. Optimal Coordinate Design of Multiple HVDC Modulation Controllers based on MIMO System Identification [C]. 2007 IEEE PES General Meeting, 2007:1-8.
[5] Xie Xiaorong, Lu Chao. Optimization and Coordination of Wide-area Damping Controls for Enhancing the Transfer Capability of Interconnected Power Systems[J]. Electric Power Systems Research, 2008, 78:1099-1108.
[6] Kundur P. Power System Stability and Control [M]. New York: McGraw-Hill, 2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45