汽車電磁制動機構的設計及仿真
2014-03-20 01:52:38林京娜
山東理工大學學報(自然科學版) 2014年5期
關鍵詞:汽車
林京娜, 王 芳
(威海職業學院 機電工程系, 山東 威海 264209)
車輛的制動性是指汽車在行駛過程中能在較短的時間內停車且維持汽車行駛方向穩定性和在下長坡的過程中能維持一定行駛車速的能力[1].汽車的制動性能是判斷汽車性能的主要方面之一,并且隨著汽車技術的不斷發展和汽車行駛速度的不斷提高,其重要性就愈發顯得突出.為了提高汽車在復雜行駛條件下的穩定性和主動安全性,具有良好功能的電磁制動系統得到了廣泛的關注[2].
汽車電磁制動是一種通過調節電流來控制電磁制動力的控制技術,由于其具有制動反應速度快、易于控制、維修方便等特點,可以極大地提高汽車的制動性能,因此受到國內外研究者和企業的普遍關注和深入研究[3-4],在電磁制動機構或電磁制動輔助器方面已取得了不少研究成果[5-6].汽車電磁制動通過控制電流來實現對制動力的控制,所以如何保證在車載電源所能提供的最大電流的情況下使得制動力達到最大值,滿足汽車制動所需的制動力是最主要的問題.目前隨著虛擬現實技術的發展,對于車輛的研究已經從單純的理論和實驗轉入到模擬仿真和虛擬現實實驗。基于以上問題,本文將在車載電源提供不同電流的情況下對設計的簡易電磁制動機構進行電磁學仿真.
1 簡易電磁制動機構的設計
1.1 制動計算
電磁制動機構是一種將輸入的電能轉化成機械能的執行機構,本文電磁制動機構的設計是采用靜態設計法確定電磁鐵的各具體參數.
1)根據初始時的電磁吸力公式
(1)
(式中Bδ為氣隙中的磁通密度(高斯))得鐵心的半徑
(2)
2)確定線圈的總磁動勢方程
(3)
式中:kct=1.2~1.55;FCT為導磁體中的磁動勢;Fδ為氣隙中磁動勢;FU為非工作氣隙中的磁動勢.試驗表明,導磁體內磁動勢占電磁鐵總磁動勢的10%~25%,非工作氣隙中的磁動勢占總磁動勢的5%~10%時,材料選擇最經濟[7].
3)確定線圈的長度和高度
(1)長度
(4)
式中:ρθ為漆包線的電阻率;F為總磁勢;τ為工作制系數;K為散熱系數;θY為溫升;fK為填充系數,在此例中取fK=0.15,散熱系數K=1.16×10-3W/cm2·℃.
(2)高度
hx=R2-R1
(5)
式中:hx為線圈的高度,R2為線圈纏繞鐵芯后的半徑.
(3)外部半徑
(6)
(4)漆包線直徑
式中,U為工作電壓.
取電磁鐵的原料為A3鋼,質量QH為68.25kg.長時工作制下的最優磁通密度比短時工作制情況下要高10%~15%,由此確定短時工作制電磁鐵的氣隙磁通密度Bδ=10 010和比值(線圈的長高比)L/(R2-R1)=L/h=4.6.
根據電磁吸力的公式由式(1)帶入數據可以得到R1=2.3mm,取電磁鐵中的磁勢降為氣隙磁勢的12%,非工作氣隙中的磁勢降為氣隙中磁勢的10%,則KCT=1/(1-0.12-0.1)=1.28.由式(3)可以得到F∑=Bδδ·kct/(0.4π)=51006(安·匝).得到總動勢后,需要確定線圈長度與高度,在本例中漆包線的電阻率可以通過查表得ρθ=6.7×10-3Ωcm2/m;溫升θY=70℃;工作制系數為0.1;在此例中取填充系數fK=0.15,由式(4)可得LK=189cm;R2=40.1cm;hx=37.8cm;外部半徑為R3=55.1cm,漆包線的直徑由式(7)得:d=1.45mm,其中U為汽車電池電壓,取24V.
1.2 機構簡易模型
本文基于傳統液壓回路電磁制動的思想設計一種電磁制動簡化機構,所提出的結構基于鼓式制動器設計.將勵磁繞組等效至電磁靜鐵中心部位,利用Auto CAD軟件繪制出結構示意圖如圖1所示.
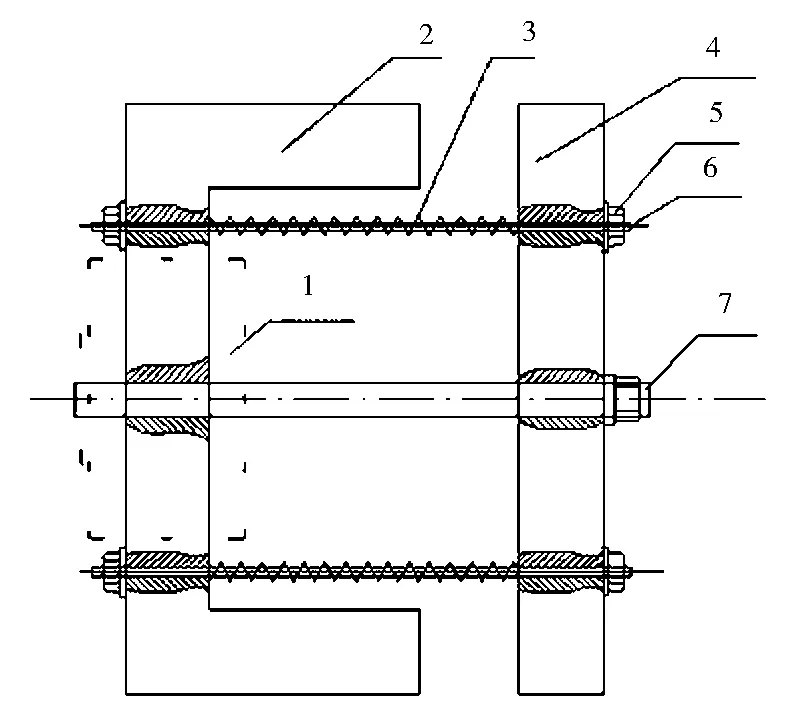
1.等效勵磁繞組;2.電磁靜鐵;3.回位彈簧;4.電磁動鐵;5.固定螺母;6.導向桿; 7.液壓推力桿圖1 電磁制動機構簡化模型
利用Ansoft12軟件分析電磁場的分布以及求解電磁力的大小時,只需對兩塊電磁鐵分析即可.因此,提取兩塊電磁鐵模型,忽略導向桿、液壓推力.根據計算以及實際問題,初步設計機構的整體尺寸為300×275×60,繼而確定各部件的尺寸,其電磁動鐵尺寸為300×50×50,電磁靜鐵尺寸為300×175×50,激勵線圈為700匝,直徑為1.45mm.
在Ansoft12中建立一個三維工程文件,在理想情況下本文將電磁線圈等效至電磁靜鐵中間部位,檢測模型是否正確,簡化我們所設定的電磁機構[8].隱去導向桿、液壓推力桿后并對機構的各部分進行網格劃分.
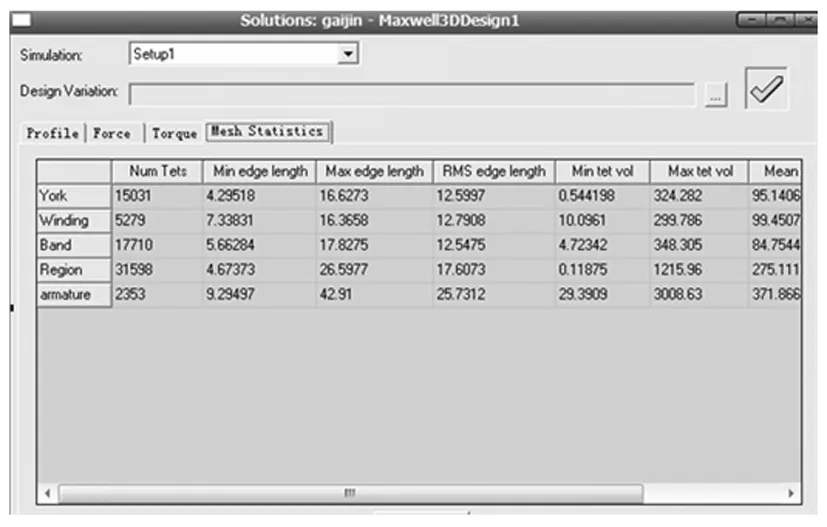
圖2 各部分剖分參數
從圖2中可以觀察到各個部件劃分出來的單元數、最小的邊長度、最大的邊長度等屬性。理論上講,各部件所劃分的單元數越多,計算越準確,現在依托實驗室現有的硬件設施劃分單元.
2 仿真求解
運動部件為電磁銜鐵,而所定義的運動求解域是Band,所以需將運動域設置成Band屬性,再對其中的運動部件進行機械屬性的設置.具體參數設置如下:
運動類型:直線運動;參考方向:沿Y軸正方向為正;初始位置設置:初始位置為0mm;運動范圍設置:因為電磁動鐵受電磁力后會向Y軸負方向運動,不允許電磁動鐵與靜鐵碰撞,所以運動范圍為-49.999mm.
機械屬性設置:運動初速度:0m/s;質量:0.1kg;阻尼系數:設置為30*(-position)*1000,負載力為彈簧彈力,滿足F=k·X,k=30.
運動參照系設置:本列中電磁動鐵運動是以整體坐標系為參照物,在參照系中選擇Global.
根據實驗室硬件設備的硬件條件,參考實際銜鐵達到穩態的時間,將仿真所需要的時間設置成0.16s,仿真步長設置成0.005s.完成模型參數設置、自檢無誤后,開始對模型求解運算,生成瞬態時間與各參數的曲線如圖3所示.
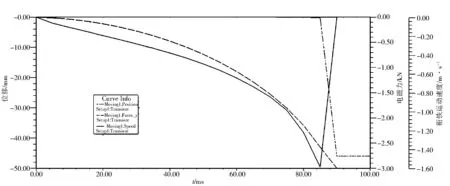
圖3 瞬態時間節點與各參數的關系曲線
對應位移與時間關系曲線可以看出,位移隨時間的增加而變大.隨時間的增加、電磁銜鐵與電磁靜鐵之間的間隙減小,電磁吸力迅速增大,位移變化開始增大,隨后位移達到最大值.
對應電磁力與時間關系曲線可知,在時間段0~0.08s內,電磁靜鐵與電磁動鐵之間的間隙變化較小,產生的電磁力較小.隨著時間的增加,靜鐵與動鐵的間隙迅速減小,電磁力也隨之增加,伴隨著電磁動鐵與電磁靜鐵的吸合,彈簧的反作用力穩定,產生的電磁力達到穩定.
對應電磁動鐵運動速度與時間的關系曲線可知,電磁力使得電磁動鐵向電磁靜鐵方向運動,運動速度隨著時間的增加而迅速增大.當電磁動鐵與電磁靜鐵之間的間隙無限小的時候,電磁動鐵的運動速度減小為0,即達到平衡.
基于車輛實際情況的考慮,外電路所加的電流分別設定為2A、3A、3.3A時,仿真分析應對的電磁力近似取值得到動態情況下電磁制動機構在運動過程中的電磁力大小見表1.

表1 電磁制動機構運動過程中產生的電磁力
3 結束語
在動態情況下電磁制動機構所能產生的制動力可以達到3 500N,安裝于車輛上的制動助力裝置對原始的電磁力有數倍的增幅,所以作用于制動盤上的制動力超過10 000N.在車輛為2t、制動距離為10m、車速為36km/h的情況下,經過計算所需的制動力為10 000N,所以該實驗仿真符合實際需要.
[1] 余志生.汽車理論[M].4版.北京:機械工業出版社, 2006.
[2] 江景舫.汽車的操縱性與穩定性[J].安全與健康:下半月, 2009 (1): 32-33.
[3] 馬濤鋒,薛念文,李仲興,等.對汽車操縱穩定性的影響因素分析及對操穩性的研究評價[J].機械設計與制造, 2005 (4): 122-123.
[4] Hong L, Young Z M. Optimum positon of electromagnetic brake on slab caster[J]. J.Iron & Steel Res., Int, 2003, 10(2):21-26.
[5] Miralem H, Peter V, Gorazd S,etal. Determining force characteristics of an electromagnetic brake using co-energy[J]. Journal of Magnetism and Magnetic Materials, 2008,320:e556-e561.
[6] 肖廣兵,閔永軍,蔡偉義,等.車輛制動性能的不確定分析[J].科技通報, 2011, 27(5): 657-660.
[7] 呂應明,寸立崗,張海明.車輛電磁制動系統研究[J].中國科技論文在線, 2007(3):11-13.
[8] 趙博,張洪亮. Ansoft12在工程電磁場中的應用[M].北京:中國水利水電出版社, 2011.
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50