基于導彈高程的機載紅外單站定位方法
2014-03-20 08:51:00藺建英袁水平
激光與紅外 2014年10期
關鍵詞:測量
藺建英,袁水平
(解放軍91245部隊,遼寧葫蘆島125001)
1 引言
在靶場導彈試驗中,如果采用一臺紅外經緯儀對導彈進行測量的同時,還能獲得光電經緯儀站點至導彈的斜距參數,就可通過單站定位數學模型計算導彈外彈道,然而,獲得精確的導彈斜距參數是十分困難的[1-3];機載紅外經緯儀和其載體飛機的整體費用相比陸上站點要高數十倍,因此,單站定位對于機載光電經緯儀完成導彈遠海試驗中外彈道測量具有重要意義。
對于在海面上數百米高度飛行的反艦導彈,導彈上安裝的無線電高度表的測量精度可達到其飛行高度的百分之一[4]。利用導彈的高程數據、載機(裝載紅外經緯儀的飛機)姿態角數據、機載紅外經緯儀站點高程數據及紅外經緯儀測量的導彈方位角和俯仰角數據,通過坐標變換和空間幾何關系,可解算得到機載紅外經緯儀與導彈之間的斜距。
2 機載紅外經緯儀坐標系的定義與關系
在已知載機地理位置數據(可由GPS或北斗衛星定位獲得)和導彈相對載機地平坐標系坐標后,可經坐標變換得到導彈在地心坐標系下的位置數據,為簡化計算,僅以獲得導彈在載機地平坐標系下的坐標作為最終結果。
2.1 坐標系定義
2.1.1 載機地平坐標系的定義
原點O:紅外經緯儀水平軸與垂直軸的交點;
OXj軸:過原點的水平面內,指向大地北;
OYj軸:過原點的鉛垂線向上;
OZj軸:與OXj軸、OYj軸構成右手直角坐標系。載機地平坐標系OXjYjZj、導彈M與地球橢球相對位置示意圖如圖1所示。
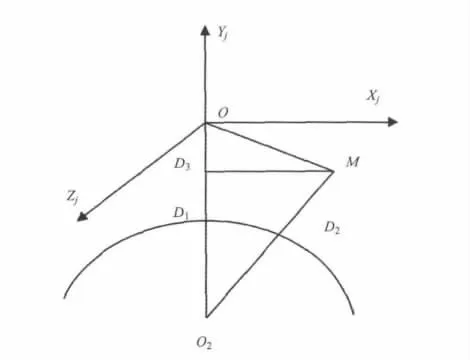
圖1 載機地平坐標系、導彈M與地球橢球相對位置示意圖Fig.1 Relative position diagram of airborne horizontal coordinate system,missile M and earth ellipsoid
2.1.2 測量坐標系的定義[5]
過紅外經緯儀水平軸與垂直軸的交點并與該設備方位轉盤平行的平面,稱為大盤平面。載機起飛前使載機縱軸線和橫軸線所確定的平面與水平面重合。
直角坐標系
原點O:紅外經緯儀水平軸與垂直軸的交點;
OXc軸:在大盤平面內,指向方位轉角輸出為零的方向,載機起飛前與大地北和載機航向角為0°方向重合;
OYc軸:垂直于大盤平面向上(平行于垂直軸);
OZc軸:與 OXc軸、OYc軸構成右手直角坐標系。
極坐標系
方位角A:由OXc軸起算所旋轉的角度,順時針為正;
高低角E:由大盤面起算所旋轉的角度,向上為正;
斜距R:原點O到目標點的直線距離。
2.2 載機地平坐標系與測量坐標系關系
測量坐標系與載機地平坐標系原點相同,OXc軸、OYc軸、OZc軸與 OXj軸、OYj軸、OZj軸相差載機的航向角κ、俯仰角和滾動角γ。航向角κ規定繞軸順時針方向旋轉(從旋轉軸正向的一端面對著坐標原點看)為正,俯仰角和滾動角γ以逆時針方向旋轉為正。
3 機載紅外經緯儀站點與導彈斜距計算方法
已知參數:機載紅外經緯儀站點高程H1;導彈高程H2;機載紅外經緯儀姿態角即航向角κ、俯仰角、橫滾角γ。
求解參數:機載紅外經緯儀站點與導彈的斜距。
3.1 導彈在測量坐標系中的坐標
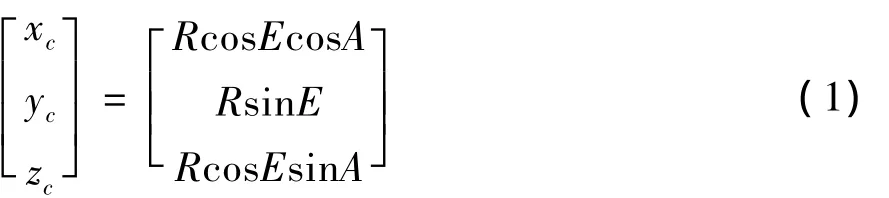
式中,xc,yc,zc為導彈在測量坐標系中的直角坐標;R,A,E分別為導彈相對紅外經緯儀站點的斜距、方位角、高低角。
3.2 導彈在載機地平坐標系中的坐標
測量坐標系可以看作是載機地平坐標系經過三個角度的旋轉得到的[6]。首先將坐標軸繞OYj軸旋轉κ角,使 XjYjZj坐標系變成 XκYκZκ坐標系,然后繞旋轉后的Zκ軸旋轉角,使XκYκZκ坐標系變成XκYκZκ坐標系,最后繞旋轉后的 Xκ軸旋轉 γ 角,使載機地平坐標系OXjYjZj與測量坐標系OXcYcZc重合。
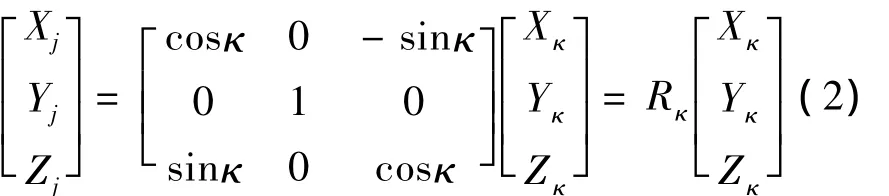
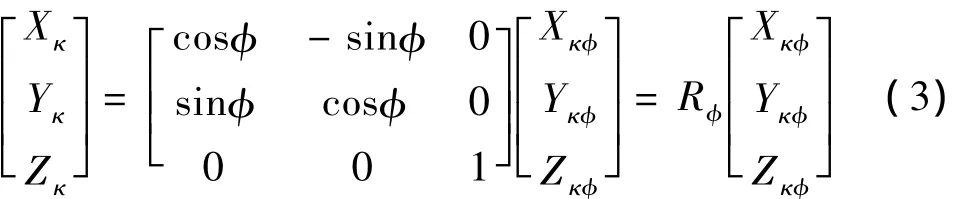
當坐標系 OXjYjZj繞 OYj軸旋轉 κ角,使OXjYjZj坐標系變成OXκYκZκ坐標系,目標在兩種坐標系中的坐標變換:
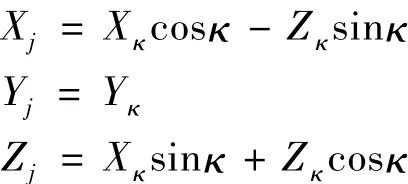
寫成矩陣形式為:
當坐標系 OXκYκZκ繞 OYκ軸旋轉 角,使OXκYκZκ坐標系變成 OXκYκZκ坐標系,目標在兩種坐標系中的坐標變換:
寫成矩陣形式為:
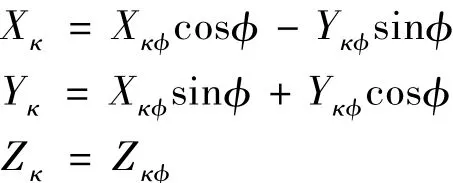
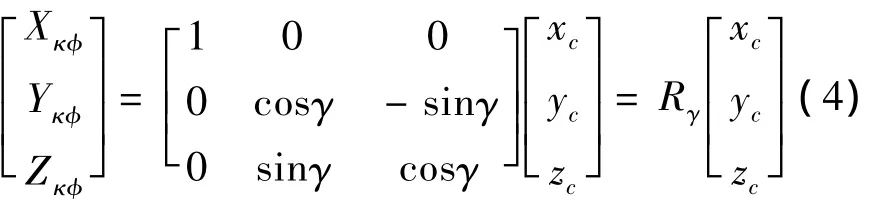
當坐標系 OXκYκZκ繞 OXκ軸旋轉 γ 角,使OXκYκZκ坐標系變成 OXcYcZc坐標系,目標在兩種坐標系中的坐標變換:
Xκ=xc
Yκ=yccosγ - zcsinγ
Zκ=ycsinγ +zccosγ
寫成矩陣形式為:
綜合式(4)、式(3)、式(2)和式(1),得到:
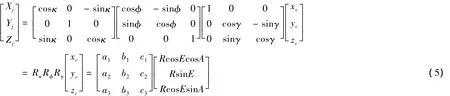
式中,a1=cosκcos ;a2=sin ;a3=sinκcos ;b1= - cosκsincosγ - sinκsinγ ;b2=coscosγ ;b3= - sinκsincosγ +cosκsinγ ;c1=cosκsinsinγ -sinκcosγ ;c2= - cossinγ ;c3=sinκsinsinγ +cosκcosγ 。
3.3 導彈斜距計算方法
圖1中,O為載機地平坐標系原點,Or為地球橢球中心,M為導彈位置點,D1、D2分別為O點和M點與Or點連線與海面的交點,D3為由M點向OOr作垂線的交點。則OM=R為導彈斜距,OD1=H1為機載紅外經緯儀站點高程,MD2=H2為導彈高程,僅考慮導彈斜距小于數十千米的情況,將地球橢球近似為圓球計算,地球半徑OrD1=OrD2=Rr,并設OD3=H3。由圖1中幾何關系可得:

可導出:

設(xjm,yjm,zjm)為導彈在載機地平坐標系中的坐標,依據式(5)可得:
由式(7)結合圖1 可得[7]:


式中,b=2(Rr+H1)[sincos E cos A+coscosγ sin E -cossinγcos E sin A],式(9)中,除R外均為已知數,解一元二次方程可計算出R;在式(7)中可由yjm≈-(H1-H2)解出R的初值,式(9)中與R的初值接近的為R的真值。
4 單站定位與兩站交會定位精度估算及影響因素分析
4.1 已知參數及誤差
為進行仿真試驗,按照反艦導彈和靶場測控裝備可達到的試驗條件作如下假定:導彈高程H2=100 m,σH2=1 m;機載紅外經緯儀站點高H1=4000 m,σH1=2 m;導彈相對紅外經緯儀站點的方位角A=10°、高低角E=-34°、機載紅外經緯儀測角精度:σA= σE=0.005°;機載紅外經緯儀姿態角:航向角 κ =20°、俯仰角 =7°、橫滾角γ=5°,姿態角測量精度(設備可達到且價格可接受的指標):σκ=0.035°、σ =0.02°、σγ=0.02°;Rr=6378137 m。各參數誤差是互不相關的。
4.2 單站定位與兩站交會定位誤差估算
4.2.1 單站定位誤差
將式(7)展開,單站定位直角坐標按式(10)、(11)、(12)計算:
將式(7)展開并代入式(8)可得:xjms=(cosκcoscos E cos A - (cosκsincosγ - sinκsinγ)sin E+(cosκsinsinγ - sinκcosγ)cos E sin A)R (10)yjms=(sincos E cos A+coscosγsin E - cossinγcos E sin A)R (11)zjms=(sinκcoscos E cos A - (sinκsincosγ - cosκsinγ)sin E+(sinκsinsinγ - cosκcosγ)cos E sin A)R(12)
根據已知數據和誤差,建立10000個隨機變量數組的樣本模型,用蒙特卡羅仿真估算測量誤差,載機地平坐標系斜距R和直角坐標xjms、yjms、zjms的誤差σR、σx、σy、σz分布如圖2所示。
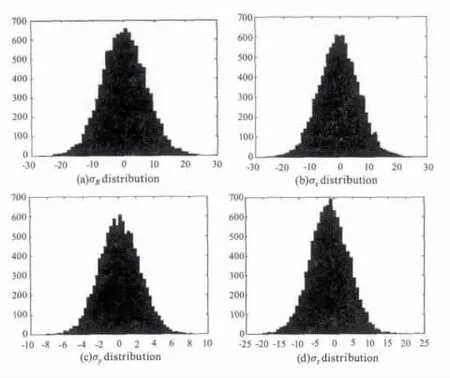
圖2 單站定位誤差分布圖Fig.2 Single station positioning errors distribution
4.2.2 兩站交會定位誤差
機載紅外經緯儀1參數與單站定位相同,站址坐標取坐標原點x1=0、y1=0、z1=0;機載紅外經緯儀2參數作如下假定:站址坐標x2=500m,y2=3900m,z2=8000 m;方位 角 A=290°、高低角E= -34°,航向角κ=30°;其余參數與機載紅外經緯儀 1相同。此時,交會角為 70°,定位精度較高[8]。
將式(7)展開,按式(13)、式(14)計算導彈在載機地平坐標系中的方位角Aj、高低角Ej[9]:
兩站交會定位直角坐標按式(15)、式(16)、式(17)計算[10]:
根據已知數據和誤差,建立10000個隨機變量數組的樣本模型,用蒙特卡羅仿真估算測量誤差,載機地平坐標系直角坐標xjms、yjms、zjms的誤差σx、σy、σz分布如圖3所示。
圖3 兩站交會定位誤差分布圖Fig.3 Double station intersection positioning errors distribution
4.3 定位精度比較
圖2 和圖3中誤差曲線是載機距目標8089 m時的誤差曲線,表1中還給出了載機距目標4066 m時的仿真結果。從表1中數據可看出:利用導彈高程經坐標轉換計算導彈斜距實現單站定位的誤差與兩站交會定位誤差相當。仿真計算表明:當斜距大于12 km時,兩站交會定位精度優于單站定位精度。
表1 單站定位與交會定位精度比較Tab.1 Comparison of positioning accuracy on single station and double station intersection
當機載紅外經緯儀用于中靶段脫靶量測量時,由于導彈和靶標在同一幀圖像中[11],影響單站定位精度的誤差項中除導彈和靶標高程誤差不變外,其他各項誤差影響將大大降低,以降低到原誤差的1/3~1/5計算,脫靶量測量誤差仿真計算結果見表1,從表1中數據看出,脫靶量測量精度高于定位精度一倍以上。
4.4 單站定位精度影響因素分析
4.1節中給出的導彈高程測量精度σH2、機載紅外經緯儀站點高程測量精度σH1、機載紅外經緯儀測角精度σA、σE和載機姿態角測量精度σκ、σ、σγ皆與導彈定位精度相關,且精度要求較高。除此之外,導彈定位精度還與機載紅外經緯儀站點高程與導彈高程之差和與導彈斜距大小相關,斜距測量誤差隨高程差變化(斜距值固定)仿真曲線如圖4(a),斜距測量誤差隨斜距值大小變化(高程差固定)仿真曲線如圖4(b),斜距測量誤差直接影響單站定位精度,從圖4(a)和圖4(b)可以看出,采用通過導彈高程計算斜距實現單站定位的方法,必須考慮機載紅外經緯儀與導彈的相對位置關系,通過合理布站,可以獲得較好的導彈定位精度。
圖4 斜距測量誤差隨高程差和斜距值變化仿真曲線Fig.4 Geodesic distance error simulation curve on difference in elevation and geodesic distance value
5 結論
在導彈靶場試驗中,利用靶場遙測設備獲得的導彈高程數據,用一臺機載紅外經緯儀就可實現對導彈的外彈道測量,在與導彈斜距為數千米時,其外彈道測量精度與同等條件下兩臺機載紅外經緯儀交會的測量結果相當,隨著載機與導彈斜距的增加,單站定位精度將會低于兩臺交會定位精度。
[1] YU Jiaxiang,XIAO Deyun.New approach for ground target location with precision analysis and simulation[J].Journal of system simulation,2007,(11):4874 - 4876.(in Chinese)余家祥,蕭德云.一種新的對地定位方法及其精度分析與 仿 真 [J].系 統 仿 真 學 報,2007,(11):4874-4876.
[2] ZHANG Shiquan,YIN Shimin.Analysis of the location algorithm formobile targets based on mono-station passive infrared method[J].Laser & Infrared,2011,41(12):1323 -1326.(in Chinese)張世全,殷世民.空中機動目標的紅外單站被動定位算法 分 析 [J].激 光 與 紅 外,2012,41(12):1323-1326.
[3] LIU Jinmang,LIZhenxing.Algorithm to estimate the parametric trajectory of elevation-only target by single station observation data[J].Laser & Infrared,2012,42(11):1301 -1305.(in Chinese)劉進忙,李振興.基于單站測量的純仰角目標參數航跡濾波方法[J].激光與紅外,2012,42(11):1301-1305.
[4] WANG Xuan,LIXiaomin.Design of high precision barometric altimeter measuring system in mini UAV[J].Measurement& control technology,2012,(2):12 - 15.(in Chinese)王晅,李小民.高精度小型無人機氣壓高度測量系統的設計[J].測控技術,2012,(2):12-15.
[5] ZHONG Dean,CUI Qinghua.The aerospace observation boatmeasuring&control communication unit calibration test[M].Beijing:National Defense Press,2009:12 - 15.(in Chinese)鐘德安,崔慶華.航天測量船測控通信設備標校與校飛技術[M].北京:國防工業出版社,2009:12-15.
[6] WANG Shugen.The principles and application of photogrammetry[M].Wuhan:Wuhan University Press,2009:38 -42.(in Chinese)王樹根.攝像測量原理與應用[M].武漢:武漢大學出版社,2009:38-42.
[7] LIN Minxu,QIAO Yanfeng.Research on single payload air pod target location method[J].Infrared Technology,2011,(10):593 -597.(in Chinese)林旻序,喬彥峰.單載荷航空吊艙目標定位方法研究[J].紅外技術,2011,(10):593 -597.
[8] SHIYanzhao,ZHU Xinhua.The study of laying position on basis of photoelectric theodolite[J].Journal of Detection &Control,2009,(12):86 -89.(in Chinese)石彥召,朱新華.基于光電經緯儀的布站研究[J].探測與控制學報,2009,(12):86 -89.
[9] LIN Jianying,CHEN Kejian.Aligning error correction method for measurement equipment[J].Aerospace Control,2009,(2):84 -87.(in Chinese)藺建英,陳克堅.測量設備站點安裝對中誤差修正方法[J].航天控制,2009,(2):84 -87.
[10] LIN Jianying,CHEN Kejian.The offshoremeasuring platform establish conception[J].Navy range science,2011,(4):4 -7.(in Chinese)藺建英,陳克堅.海上靶區建設構想[J].海上靶場學術,2011,(4):4 -7.
[11] LIGuoyou,FU Chengyu.Miss distance measurement based on single radar- photoelectric theodolite[J].Journal of Projectiles,Rocket,Missile and Guidance,2012,(6):177 -182.(in Chinese)李國友,付承毓.基于單臺雷達光電經緯儀的脫靶量測量方法[J].彈箭與制導學報,2012,(6):177 -182.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
