一種改進(jìn)的時(shí)間最優(yōu)控制算法?
2014-03-21 06:34:20劉亞云金亮亮
雷達(dá)科學(xué)與技術(shù) 2014年2期
關(guān)鍵詞:系統(tǒng)
劉亞云,金亮亮
(中航工業(yè)雷華電子技術(shù)研究所,江蘇無(wú)錫214063)
0 引言
時(shí)間最優(yōu)控制是最優(yōu)控制理論中的一種,對(duì)于非奇異且控制輸入變量為線性的一類系統(tǒng)時(shí)間最優(yōu)化問(wèn)題,采用Bang-Bang控制滿足龐特里亞金極小值原理[1]條件。Bang-Bang控制中各分量u?i(t)為時(shí)間t的分段常值函數(shù),并在切換時(shí)間上完成兩個(gè)常值(極大值和極小值)之間的跳變。
在Bang-Bang控制中,如果速度估計(jì)的不準(zhǔn)確,在開(kāi)關(guān)線附件就會(huì)引發(fā)控制量的頻繁切換,從而引起“顫振”[2]并對(duì)實(shí)際系統(tǒng)造成很大的損害。本文在開(kāi)關(guān)線兩側(cè)設(shè)置“緩沖區(qū)”,避免了“顫振”,保證系統(tǒng)以最快速度向目標(biāo)點(diǎn)收斂,并在目標(biāo)鄰域內(nèi)切換為滑模變結(jié)構(gòu)控制,使系統(tǒng)具有很強(qiáng)的魯棒性能。
1 系統(tǒng)最優(yōu)控制設(shè)計(jì)
雷達(dá)伺服系統(tǒng)采取機(jī)電控制方式,系統(tǒng)的傳遞函數(shù)[3]簡(jiǎn)化為

式中,K表示開(kāi)環(huán)增益,T表示慣性時(shí)間常數(shù)。

則系統(tǒng)的狀態(tài)方程為

尋找一個(gè)容許控制向量u(t)∈R r,滿足

使系統(tǒng)從x(t0)=x0出發(fā),在末態(tài)時(shí)刻t f到達(dá)目標(biāo)x(t f)=x tf,并使性能指標(biāo):

最小。
由極小值原理,構(gòu)造哈密頓函數(shù):

則控制量

即

在控制量u?(t)=U作用下,始于(x10,x20)的狀態(tài)軌線方程為

它在相平面上繪制狀態(tài)軌跡圖如圖1所示。

圖1 時(shí)間最優(yōu)算法相軌跡圖
圖1中γ+和γ-組成最優(yōu)開(kāi)關(guān)線,它們將整個(gè)相平面分成R+和R-兩部分,設(shè)p(x1,x2)為狀態(tài)空間上任意一點(diǎn),則最優(yōu)控制滿足如下控制律:

在雷達(dá)伺服系統(tǒng)中考慮到減重的需要,一般沒(méi)有測(cè)速電機(jī)等可以實(shí)時(shí)測(cè)量電機(jī)的角速度,需要采用狀態(tài)觀測(cè)器進(jìn)行估計(jì)。由于速度估計(jì)不準(zhǔn)確,在開(kāi)關(guān)線附近將引發(fā)控制量在極大極小值之間頻繁切換,產(chǎn)生“顫振”現(xiàn)象。
2 Bang-Bang控制改進(jìn)算法
為抑制控制量u?(t)在開(kāi)關(guān)線附近切換形成“顫振”,將開(kāi)關(guān)線在x1軸方向上分別向左、右平移Δx,這樣將形成一個(gè)寬度為Δx的緩沖區(qū)(Δx≤Δx1),如圖2所示。
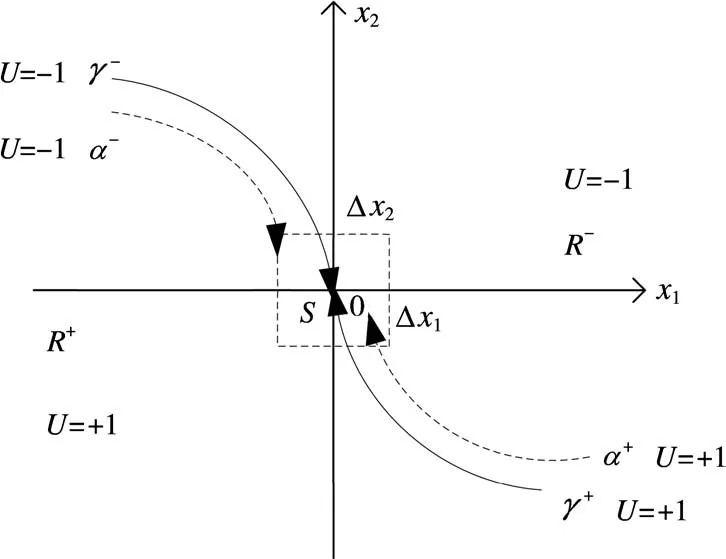
圖2 改進(jìn)后的最優(yōu)算法相軌跡圖
在圖2的相平面上,原點(diǎn)附近方框中的區(qū)域用S={(x1,x2)||x1|≤Δx1,|x2|≤Δx2}表示,α+和α-為緩沖帶,則緩沖帶α(即α+和α-)和S將相平面分成R+和R-兩部分。設(shè)p(x1,x2)為狀態(tài)空間上任意一點(diǎn),其控制律為

在該算法中,當(dāng)狀態(tài)點(diǎn)p(x1,x2)進(jìn)入開(kāi)關(guān)線后,在開(kāi)關(guān)線附近上下變動(dòng)時(shí),由于緩沖區(qū)的存在,將大大降低控制量來(lái)回切換的次數(shù),抑制“顫動(dòng)”現(xiàn)象。緩沖區(qū)的寬度Δx,要根據(jù)速度估計(jì)誤差進(jìn)行調(diào)試。
當(dāng)狀態(tài)點(diǎn)p進(jìn)入?yún)^(qū)域S時(shí),將切換為滑模變結(jié)構(gòu)控制,這樣將避免最優(yōu)控制算法在原點(diǎn)附近產(chǎn)生“顫振”[4],同時(shí)降低穩(wěn)態(tài)誤差,提高定位精度和魯棒性能。
3 滑模變結(jié)構(gòu)控制算法
滑模變結(jié)構(gòu)控制具有快速響應(yīng)、對(duì)參數(shù)變化及擾動(dòng)不敏感等特點(diǎn),對(duì)最小相位系統(tǒng)和非最小相位系統(tǒng)都具有較好的控制效果[5]。因此,當(dāng)系統(tǒng)進(jìn)入滑動(dòng)模態(tài)以后,對(duì)外部干擾和參數(shù)攝動(dòng)具有很好的自適應(yīng)性,基本不受系統(tǒng)參數(shù)變化和外界擾動(dòng)的影響。但是滑模變結(jié)構(gòu)控制在滑動(dòng)模態(tài)下會(huì)產(chǎn)生高頻抖振,為了減弱抖振,本文使用組合趨近律控制算法,即指數(shù)趨近律和變速趨近律的組合。
指數(shù)趨近律在穩(wěn)態(tài)時(shí),滑模函數(shù)在切換帶之間來(lái)回切換,產(chǎn)生較大的穩(wěn)態(tài)抖振;變速趨近律穩(wěn)態(tài)時(shí),可穩(wěn)定于原點(diǎn),有效地降低了抖振,具有良好的穩(wěn)態(tài)性能。如果把二者結(jié)合起來(lái),在滑模運(yùn)動(dòng)的前期采用指數(shù)趨近律,在滑模運(yùn)動(dòng)的后期和穩(wěn)定段采用變速趨近律[6],這樣系統(tǒng)既能快速趨近,又能降低抖振。
對(duì)該系統(tǒng)進(jìn)行離散化,可得

式中,x(k)=[x1(k),x2(k)]。 設(shè) 指 令 信 號(hào)R=[r(k),dr(k)],R1=[r(k+1),dr(k+1)],切換函數(shù)

式中,C e=[c,1]。則

由式(11)、(12)和(13)可得

其中離散趨近律為

在實(shí)際應(yīng)用中,為了削弱抖振,采用準(zhǔn)滑動(dòng)模態(tài)控制原理,即使一定范圍內(nèi)的狀態(tài)點(diǎn)均被吸引到切換面的某一鄰域內(nèi),或稱為切換面的邊界層[7]。因此用飽和函數(shù)sat(s)代替滑動(dòng)模態(tài)中的符號(hào)函數(shù)sgn(s)。

4 試驗(yàn)驗(yàn)證
使用常規(guī)的最優(yōu)控制算法,即不加緩沖區(qū),在1.5 s時(shí)指令角度從-90°轉(zhuǎn)換到0°,其角度響應(yīng)曲線和控制量變化曲線如圖3所示。
由圖3可知,在2s左右最優(yōu)控制到達(dá)開(kāi)關(guān)線,控制量發(fā)生跳轉(zhuǎn),但在隨后的最優(yōu)運(yùn)動(dòng)過(guò)程中,控制量在極大極小值之間頻繁跳轉(zhuǎn),產(chǎn)生“顫振”現(xiàn)象,這種“顫振”將對(duì)電機(jī)造成損害,并影響電機(jī)的使用壽命。
使用改進(jìn)后的最優(yōu)控制算法,指令在1.6 s左右從0°跳轉(zhuǎn)到-90°,當(dāng)狀態(tài)點(diǎn)進(jìn)入?yún)^(qū)域S時(shí),分別使用PID控制算法和滑模變結(jié)構(gòu)控制算法,其控制效果如圖4和圖5所示。
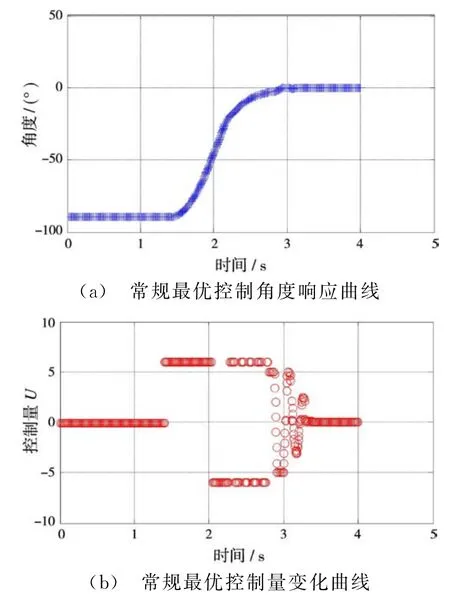
圖3 常規(guī)最優(yōu)控制效果圖
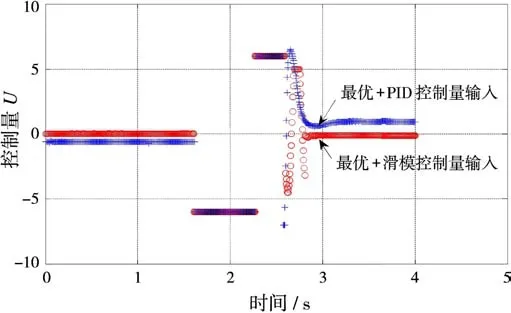
圖4 控制量輸出比較圖

圖5 角度響應(yīng)曲線比較圖
由圖4可知,在2.3s左右控制量發(fā)生跳轉(zhuǎn),并且在整個(gè)運(yùn)動(dòng)過(guò)程中只跳轉(zhuǎn)了一次,有效避免了控制量在開(kāi)關(guān)線附近頻繁的切換,大大降低了“顫振”對(duì)系統(tǒng)造成的危害。
由圖5可知,常規(guī)PID控制超調(diào)量為1.48°,3.2 s時(shí)進(jìn)入穩(wěn)態(tài),穩(wěn)態(tài)誤差為0.2°。而滑模控制為欠阻尼,3 s時(shí)進(jìn)入穩(wěn)態(tài),穩(wěn)態(tài)誤差為0.07°。
由比較結(jié)果可知,滑模控制的穩(wěn)態(tài)性能優(yōu)于常規(guī)PID控制,并且滑模控制算法魯棒性能強(qiáng),對(duì)于電機(jī)參數(shù)變化等具有一定的抗干擾能力。
5 結(jié)束語(yǔ)
仿真和實(shí)踐表明,在缺乏測(cè)速傳感器以及速度有較大的干擾情況下,改進(jìn)最優(yōu)算法結(jié)合滑模控制算法有效地解決了控制律“顫振”及穩(wěn)態(tài)誤差的問(wèn)題。從圖3~圖5可以看出,使用改進(jìn)后的最優(yōu)控制算法后,控制律從進(jìn)入開(kāi)關(guān)線開(kāi)始到接近目標(biāo)點(diǎn)過(guò)程中,沒(méi)有發(fā)生切換,避免了“顫振”現(xiàn)象的發(fā)生。進(jìn)入目標(biāo)點(diǎn)鄰域后使用滑模變結(jié)構(gòu)控制算法,降低了系統(tǒng)的穩(wěn)態(tài)誤差,提高了定位精度和魯棒性能。
改進(jìn)后的時(shí)間最優(yōu)和滑模變結(jié)構(gòu)組合控制算法,能使系統(tǒng)以最短的時(shí)間運(yùn)動(dòng)到目標(biāo)點(diǎn)并能保持很好的穩(wěn)定性和控制精度。
[1]胡壽松,王執(zhí)銓,胡維禮.最優(yōu)控制理論與系統(tǒng)[M].北京:科學(xué)出版社,2010:68-74.
[2]丁青青,王贊基.時(shí)間最優(yōu)控制算法及其在SVC中的應(yīng)用[J].清華大學(xué)學(xué)報(bào),2004,44(4):442-445.
[3]李鳳俐.時(shí)間最優(yōu)控制理論在雷達(dá)伺服系統(tǒng)中的應(yīng)用[J].測(cè)控技術(shù),2008,27(6):47-49.
[4]徐凱.一種時(shí)間最優(yōu)參數(shù)自調(diào)整模糊矢量控制方法的研究[J].控制與決策,2010,25(1):153-156.
[5]唐茂華,吳鵬.基于自抗擾的非最小相位伺服系統(tǒng)控制[J].雷達(dá)科學(xué)與技術(shù),2013,11(3):335-340.TANG Mao-hua,WU Peng.Control of Non-Minimum Phase Servo System Based on Auto Disturbance Rejection[J].Radar Science and Technology,2013,11(3):335-340.(in Chinese)
[6]劉金琨.滑模變結(jié)構(gòu)控制MATLAB仿真[M].北京:清華大學(xué)出版社,2005:93-95.
[7]李義強(qiáng),周惠興,王先逵,等.直線電機(jī)伺服定位系統(tǒng)時(shí)間最優(yōu)魯棒控制[J].電機(jī)與控制學(xué)報(bào),2011,15(3):13-18.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32