基于圖像處理中霍夫變換的定位器坡度檢測
2014-03-23 06:31:16于博軒陳唐龍
城市軌道交通研究 2014年5期
關(guān)鍵詞:檢測
于博軒 陳唐龍 于 龍 馬 成 何 釗
(北京鐵路局懷柔北機(jī)務(wù)段,101400,北京∥第一作者,助理工程師)
基于圖像處理中霍夫變換的定位器坡度檢測
于博軒 陳唐龍 于 龍 馬 成 何 釗
(北京鐵路局懷柔北機(jī)務(wù)段,101400,北京∥第一作者,助理工程師)
定位器坡度檢測是接觸網(wǎng)中一項(xiàng)重要的安全性檢測項(xiàng)目。針對目前定位器坡度檢測方法效率低下,精度不高的現(xiàn)狀,通過接觸網(wǎng)關(guān)鍵懸掛自動巡查系統(tǒng)捕捉圖像,對采集到的接觸網(wǎng)定位裝置圖像進(jìn)行處理,將圖像中的定位器、定位管等裝置細(xì)化成直線。然后根據(jù)霍夫變換理論,在極坐標(biāo)下返回該直線特征,進(jìn)而計(jì)算出定位裝置中定位器的坡度。試驗(yàn)證明該算法具有較高的準(zhǔn)確度。
高速鐵路接觸網(wǎng);定位器坡度;圖像處理;霍夫變換
First-author'saddressBeijing Railway Bureau Huairou North Locomotive Depot,Hairon 101400,Beijing,China
定位裝置是鐵路供電支持結(jié)構(gòu)中的主要組成部分,它是對接觸線進(jìn)行橫向定位的裝置。定位裝置由定位管、定位器、支持器、定位線夾及其他連接部件組成。定位器是定位裝置的主體,它是通過線夾把接觸線固定到相應(yīng)位置上。在曲線區(qū)段上,由于線路的外軌超高,機(jī)車受電弓隨之向曲線內(nèi)側(cè)發(fā)生傾斜,為避免定位器碰撞受電弓,要求定位器具有一定的傾斜度,其傾斜度規(guī)定在1∶10到1∶5之間[1]。因?yàn)槎ㄎ黄鞒惺苤佑|線拉出值引起的水平面內(nèi)側(cè)向力、定位器自身重量和部分接觸線重量等多個力的綜合作用,所以當(dāng)定位器的安裝不符合設(shè)計(jì)要求時,就會在定位點(diǎn)處形成硬點(diǎn),使得受電弓通過時產(chǎn)生火花。通過調(diào)整定位器傾斜度,可使定位器的軸線方向與這些力的合力方向重合,消除定位點(diǎn)外的硬點(diǎn)[2]。因此,檢測并根據(jù)需要調(diào)整定位器的坡度,保證其符合鐵路技術(shù)標(biāo)準(zhǔn),對安全行車具有重要的意義。
在實(shí)際測量中,通常采用水平測量尺或激光測量儀來測量定位器坡度,通過測量定位器上兩點(diǎn)的高度差,再除以該兩點(diǎn)的水平距離差來得到定位器坡度。但該方法檢測效率低下,精度不高,難以滿足目前我國高速鐵路快速發(fā)展的要求。所以本文提出一種基于計(jì)算機(jī)圖像處理自動檢測定位器坡度的方法,經(jīng)驗(yàn)證具有較高的準(zhǔn)確度。
該方法的測量過程分為4步:①提取采集到的圖像;②對圖像進(jìn)行處理,剔除干擾,使檢測目標(biāo)易于識別;③識別檢測目標(biāo),提取被測對象特征;④計(jì)算定位器坡度,返回結(jié)果。
1 系統(tǒng)組成
本裝置硬件結(jié)構(gòu)由支吊柱定位裝置抓拍相機(jī)組、接觸線成像機(jī)組、補(bǔ)償光源設(shè)備、支吊柱識別裝置、嵌入式觸發(fā)控制模塊、高性能服務(wù)器、系統(tǒng)電源管理模塊及顯示與操作設(shè)備組成(見圖1)。
車外部分由定位裝置區(qū)域抓拍相機(jī)、補(bǔ)償光源設(shè)備、支吊柱識別模塊組成。如圖2所示,當(dāng)檢測車路過支柱所在位置,支吊柱識別模塊將線陣圖像數(shù)據(jù)傳輸給高性能服務(wù)器,由服務(wù)器向觸發(fā)控制模塊發(fā)出觸發(fā)命令,控制模塊接到觸發(fā)命令后發(fā)出相機(jī)觸發(fā)信號,前后4臺相機(jī)便同時對同一支柱進(jìn)行正反兩面對稱抓拍。
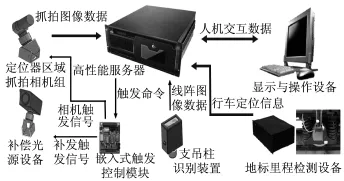
圖1 系統(tǒng)硬件組成框圖

圖2 車頂硬件設(shè)施
車內(nèi)部分由嵌入式觸發(fā)控制模塊、高性能服務(wù)器、系統(tǒng)電源管理模塊等組成并封裝于單一機(jī)柜中。地標(biāo)里程檢測設(shè)備速度傳感器安裝于車軸處,和車軸同步轉(zhuǎn)動,每轉(zhuǎn)一周輸出200個脈沖,用一個計(jì)數(shù)器專門來計(jì)數(shù),其計(jì)數(shù)值除以200,乘以車輪直徑,再乘以π,即可得到車行走的距離。數(shù)據(jù)處理部分位于車內(nèi)機(jī)柜中。
軟件組成由支吊柱識別功能模塊、實(shí)時成像采集處理模塊、行車定位功能模塊、成像信息融合與存儲模塊、專用巡線圖像信息管理模塊組成(見圖3)。
2 圖像處理
圖4為一幅定點(diǎn)抓拍的腕臂圖像,該腕臂所在支柱的桿號為310。
為了消除圖4中接觸線的干擾,先創(chuàng)建一個半徑為5個像素的平坦的圓盤型結(jié)構(gòu)元素se。

圖4 桿號為310的腕臂圖像
用該結(jié)構(gòu)元素在整個圖像區(qū)域平移,并檢查哪里能完全匹配圖像的前景部分,從而將圖5中不能夠完全匹配較細(xì)的接觸線成功腐蝕。由于定位裝置的圖像較粗,若直接測量,會對定位器坡度的檢測精度有較大影響。為了能夠準(zhǔn)確檢測出定位管、定位器等直線,本文從直線的邊緣逐層向中心細(xì)化,直到將二值物體和形狀減小為單個像素寬的線為止[3]。腐蝕、細(xì)化后的腕臂圖像如圖5及圖6所示。
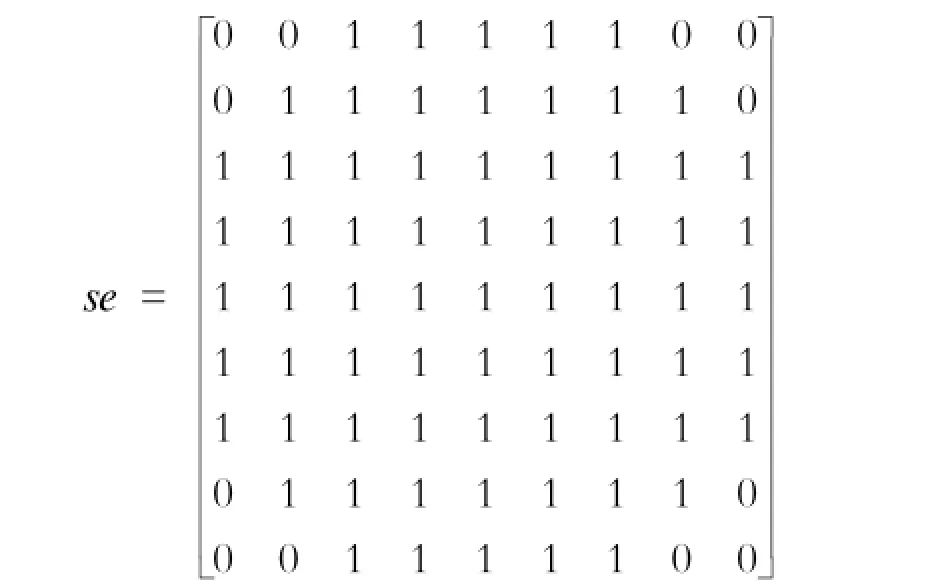

圖5 腐蝕后的腕臂圖像

圖6 細(xì)化后的腕臂圖像
3 基于霍夫變換的測量方法
霍夫變換的實(shí)質(zhì)是對圖像進(jìn)行坐標(biāo)變換,使變換結(jié)果更易于識別和檢測[4]。
設(shè)直線

式中:
y——變量;
x——自變量;
k——直線斜率;
b——直線截距。
可以將該直線轉(zhuǎn)換到k,b坐標(biāo)系下,即:

將x,y坐標(biāo)系中的一點(diǎn)(x0,y0),轉(zhuǎn)換到k,b坐標(biāo)系中,變成了斜率為-x0,截距為y0的一條直線:

所以,將x,y坐標(biāo)系中一條直線上所有的點(diǎn)都轉(zhuǎn)換到k,b坐標(biāo)系中,會得到經(jīng)過某一點(diǎn)的無數(shù)條直線,而這個交點(diǎn)的坐標(biāo)值k和b就是原x,y坐標(biāo)系下直線y=kx+b的斜率k和截距b。由此可知,通過坐標(biāo)系的轉(zhuǎn)換能夠得到原直線的特征。
霍夫變換正是基于這種思想,將直線方程由直角坐標(biāo)轉(zhuǎn)換為極坐標(biāo)形式,在極坐標(biāo)中反映出原直線的特征。
將X-Y平面的圖像變換到θ-ρ平面處理。直線方程為:

式中:
ρ——極坐標(biāo)中原點(diǎn)到直線的距離;
θ——極坐標(biāo)中直線相對于正向x軸的順時針角度。
而直角坐標(biāo)系里直線的角度信息為θ+90°。
通過直線方程可以看出,X-Y平面上的一點(diǎn)(x0,y0)在θ-ρ平面上是一條正弦曲線,X-Y平面上的一條直線在θ-ρ平面上是經(jīng)過一點(diǎn)(θ0,ρ0)的無數(shù)條正弦曲線的集合,而該交點(diǎn)的值就是XY平面上直線的θ和ρ值,如圖7及圖8所示。
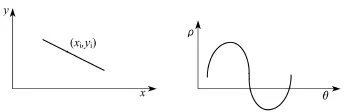
圖7 點(diǎn)霍夫變換的極坐標(biāo)形式

圖8 直線霍夫變換的極坐標(biāo)形式
由上式得出在X-Y平面上直線方程為:

得到極坐標(biāo)下(θ0,ρ0)坐標(biāo)值,便能求出原直線在直角坐標(biāo)系里的斜率和截距。
霍夫變換直線檢測是直接按照霍夫變換定義進(jìn)行的,算法描述如下:
(1)對原始圖像進(jìn)行二值化,設(shè)0表示背景,1表示物體特征點(diǎn)。
(2)在參數(shù)空間ρ,θ里,建立一個累加數(shù)組H[ρ,θ],并置數(shù)組H中每個元素初值都為0;對二值圖像中每個以1表示的點(diǎn)(x,y),讓θ取遍θ軸上所有可能的值,并計(jì)算對應(yīng)的ρ,再根據(jù)ρ和θ的值對數(shù)組進(jìn)行累加(H[ρ,θ]=H[ρ,θ]+1)。
(3)對數(shù)組H[ρ,θ]進(jìn)行局部峰值檢測,得到被檢測直線的參數(shù)ρ和θ[5]。
通過霍夫變換檢測圖6中的直線,效果如圖9所示。霍夫變換圖9中的4個矩形的點(diǎn)分別代表檢測出的圖6中的4條直線,而它們的坐標(biāo)值則直接返回了該4條直線的特征。返回結(jié)果如表1所示。
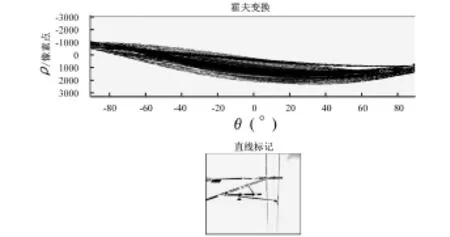
圖9 桿號為310的腕臂圖像霍夫變換效果圖
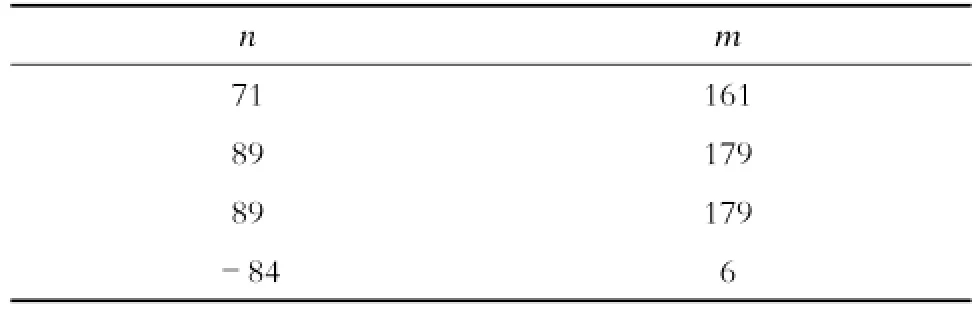
表1 桿號310腕臂圖像定位器坡度檢測結(jié)果(°)
該結(jié)果中n為圖中矩形的橫坐標(biāo)值,m為圖5中直線逆時針旋轉(zhuǎn)與水平正方向的夾角,由此得出定位器與水平方向的夾角a=6°,定位器坡度值為tana=0.105 1。
為了檢驗(yàn)此算法的準(zhǔn)確性,試驗(yàn)采用電子量角器予以驗(yàn)證。從圖10中可以清晰看到,電子量角器顯示角度?=174.01°,進(jìn)而可知該定位器與水平的夾角約為6°,與返回的a值近乎相等。因此可以得出結(jié)論,上述方法具有較高的準(zhǔn)確度。
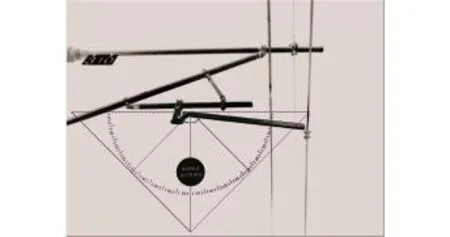
圖10 電子量角器驗(yàn)證桿號310腕臂圖像中定位器坡度
為了驗(yàn)證上述方法應(yīng)用是否廣泛,試驗(yàn)另選取一張較為復(fù)雜的圖片進(jìn)行試驗(yàn)。該圖像中腕臂的支柱編號為341。腕臂圖像如圖11所示。由于此幅圖像是從傍晚拍攝的一段視頻流中截取的,所以檢測目標(biāo)與背景之間的顏色差異較圖4相比沒有那么明顯,并且該定位器上還覆蓋著一層積雪。

圖11 桿號為341的腕臂圖像
在之前的算法中,檢測的角度是定位器所在直線沿逆時針旋轉(zhuǎn)與定位管所在直線正方向的夾角,而這幅圖像中定位方式為反定位,所以先將該圖像進(jìn)行矩陣左右反轉(zhuǎn)。如圖12所示。

圖12 矩陣左右反轉(zhuǎn)后的圖像
由于背景對檢測目標(biāo)干擾較大,所以檢測前先將背景濾除,然后再按前面介紹的算法進(jìn)行檢測,得到霍夫變換效果圖和返回結(jié)果如圖13和表2所示。
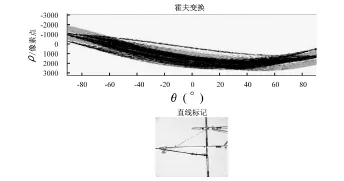
圖13 桿號為341的腕臂圖像霍夫變換效果圖
從返回結(jié)果中看到該定位器坡度角約為6°,電子量角器驗(yàn)證結(jié)果如圖14所示。
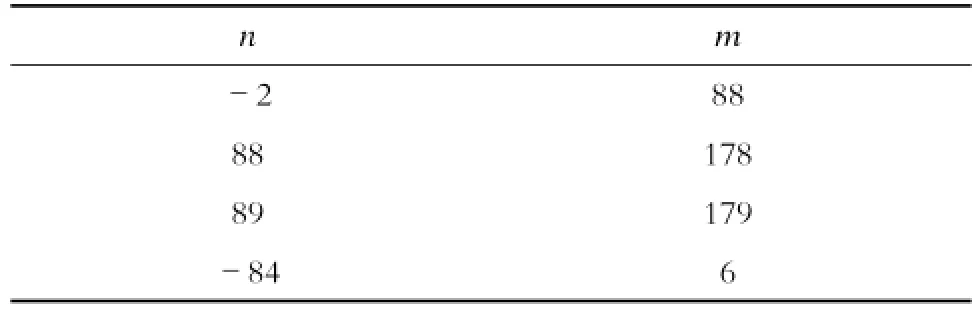
表2 桿號341腕臂圖像定位器坡度檢測結(jié)果(°)
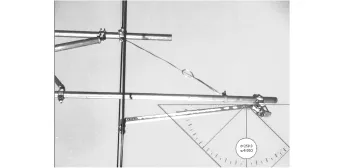
圖14 電子量角器驗(yàn)證桿號341腕臂圖像中定位器坡度
可見,電子量角器測量的定位器坡度角的結(jié)果也大約等于6°,與返回值相等,因此證明該方法在處理稍復(fù)雜圖像時也具有一定的準(zhǔn)確度。
4 校正
當(dāng)取得一幅圖片,其顯示的定位器坡度角是人眼從水平觀測的角度來看到的夾角。實(shí)際中的定位管安裝在腕臂上,相機(jī)是以一定仰角去拍攝,這樣,照片上顯示的坡度角會比實(shí)際的小(如圖15:定位器實(shí)際坡度角為c,相機(jī)拍攝照片顯示坡度角為d)。

圖15 水平與仰視看到的角度對比圖
可以看出,仰角拍攝造成的影響不會使水平方向邊的長度出現(xiàn)變化,只會使垂直方向邊的長度變短,所以坡度的校正換算關(guān)系可以等價(jià)到垂直邊長度的變化關(guān)系上來,如圖16所示。
假設(shè)B是相機(jī)所在位置,O1O2為水平方向觀測到的垂直長度,A1A2為垂直邊的實(shí)際位置。設(shè)A1A2=O1O2=a,通過相機(jī)拍攝的圖片顯示出的長度MN=b。因?yàn)镸N⊥AB,相機(jī)拍攝的仰角為θ,所以a和b之間的關(guān)系為:

由于水平方向長度不變,所以坡度值的大小與垂直方向長度成正比關(guān)系,因此,根據(jù)式(6)可知,實(shí)際坡度值與測量出的坡度值之間也存在著一個系數(shù)為1/cosθ的正比關(guān)系。
檢測時,由于人工把相機(jī)的拍攝仰角定為45°,所以本文前面檢測的桿號為310和341的兩幅定位器圖片,它們的實(shí)際坡度值應(yīng)為:


圖16 相機(jī)與拍攝目標(biāo)位置關(guān)系示意圖
該值滿足于規(guī)定的(0.1,0.2)范圍之內(nèi),所以該定位器情況正常。
5 結(jié)語
對從伊寧東站采集到的定位裝置圖片進(jìn)行處理,采用了腐蝕、細(xì)化、去除背景及圖形左右轉(zhuǎn)置等方法,再通過霍夫變換對直線進(jìn)行檢測,得到直線的特征數(shù)據(jù),最終返回坡度值。本方法能夠縮小檢測范圍,使檢測目標(biāo)更為明確,并具有一定的準(zhǔn)確度;同時,也大大減少了不必要的人力物力,提高了檢測效率。但對于被檢測圖像中,背景含有房屋、樹木,以及定位裝置上存在垃圾等異物對于檢測目標(biāo)成像造成的影響,還需要繼續(xù)深入研究。
[1] 于萬聚.高速電氣化鐵路接觸網(wǎng)[M].成都:西南交通大學(xué)出版社,2003.
[2] 段汝嬌,趙偉.基于計(jì)算機(jī)視覺的接觸網(wǎng)定位器傾斜度自動測量方法[J].中國鐵道科學(xué),2011.7(4):82.
[3] Rafael C.Gonzalez.數(shù)字圖像處理[M].北京:電子工業(yè)出版社,2005.
[4] 葉富東.基于霍夫變換的圖像檢測算法[J].湖北生態(tài)工程職業(yè)技術(shù)學(xué)院學(xué)報(bào),2011(3):9.
[5] 易玲.基于分級的快速霍夫變換檢測[J].微計(jì)算機(jī)信息,2011,11(23):206.
Locator Slope Detection Based on Hough Transform in Image Processing
Yu Boxuan,Chen Tanglong,Yu Long,Ma Cheng,He Zhao
Locator slope is an important safety test itemfor the catenary.Due to the inefficiency and inaccuracy of the current catenary locator method for slope measuring,an automatic inspection system of catenary suspension is used to collect images,which are then processed to refine the locator into a straight line.Based on the Hough transform theory,in polar coordinates the features of straight lines will be retured,which helps to calculate the slope of catenary locator.The experimental result shows that this algorithm has high precision.
highspeed railway;catenary locator slope;image processing;Hough transform
U 225.4+2
2012-09-25)
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48