下肢外骨骼助力裝置設計
2014-03-24 23:08:58伍宏芳等
科技創新與應用 2014年9期
伍宏芳等
摘 要:下肢外骨骼機器人是一種可穿戴在操作者身體外部的一種機械裝置,它可給穿戴外骨骼的人提供支撐、保護,及增強運動能力。文章闡述了下肢外骨骼機器人的研究意義,介紹了下肢外骨骼機器人的機械結構,實驗仿真為驅動電機的選型提供了理論依據。提出了一種實時性的外骨骼機器人控制系統,通過各種傳感器及時收集機器人的運動和位置信息,信息經CAN總線傳輸至處理器,處理器能夠有效地分析和識別人的運動意圖,并做出準確的預判,從而配合人體做出相應的動作,實現人機協調,最終提高人體的行走能力。
關鍵詞:機器人;外骨骼;控制;助力
前言
作為人機一體化技術的重要組成部分,可穿戴式的下肢外骨骼技術已越來越受到學術界和工業界的關注。既可用作康復輔具,輔助下肢殘障人士行走,也可用作負載行走時的助力裝置,在民用及軍用領域均有較好的應用前景[1]。該領域的研究涉及機器人學、人體工程學、控制理論、傳感器技術、信息處理技術、模式識別等。
國外對助力外骨骼機器人的研究起步較早,研究成果比較前沿的是美國、日本、以色列等國家。日本外骨骼機器人HAL3由筑波大學研發,功能為:幫助人實現行走、起立、坐下等下肢動作。該助力機器人采用了角度傳感器、肌電信號傳感器和地面接觸力傳感器等傳感設備來獲得外骨骼和操作者的狀態信息。它將所有的電機驅動器、測量系統、計算機和無線局域網絡,以及動力供應設備都整合到背包中[2]。以色列埃爾格醫學技術公司研發的“ReWalk”用一副拐杖幫助維持身體平衡。該裝置由電動腿部支架、身體感應器和一個背包組成,背包內有一個計算機控制盒以及可再充電的蓄電池。使用者可以用遙控腰帶選定某種設置,如站、坐、走、爬等,然后向前傾,激活身體各部分所安裝的感應器,使機械腿處于運動之中。裝置主要用來幫助癱瘓者恢復行走能力。
國內對下肢外骨骼機器人的研究起步較晚,還處在基礎研究階段。目前國內幾所高校也開始了對人體下肢外骨骼的探索。中科院合肥智能機械研究所研制的下肢步行助力外骨骼機器人雙下肢共有12個自由度,髖關節及膝關節屈伸為主動關節,共由4個伺服電機驅動。其下肢康復助行機構,主要包括穿戴在身上的助行行走機構和抬升機構。通過這兩個裝置, 使得病人能夠在無他人幫助的情況下, 進行功能鍛煉以恢復健康[3]。但是在研究的深度和廣度上,與國外相比還有相當的差距。
1 下肢外骨骼機器人結構設計
行走的實現是依靠髖關節、膝關節和踝關節的運動協作來完成的。從人體的運動學步態來看,人體單下肢共有7個自由度,髖關節和踝關節各有3個自由度,分別是圍繞運動軸的屈/伸和跖屈/背屈運動,外展內收,旋內/旋外運動,膝關節有1個繞運動軸的屈/伸運動[4]。而人體在行走過程中驅動力主要是由髖關節和膝關節提供,因此,文章的下肢外骨骼助力機器人在髖關節和膝關節分別安裝了直流推桿電機作為驅動電機。
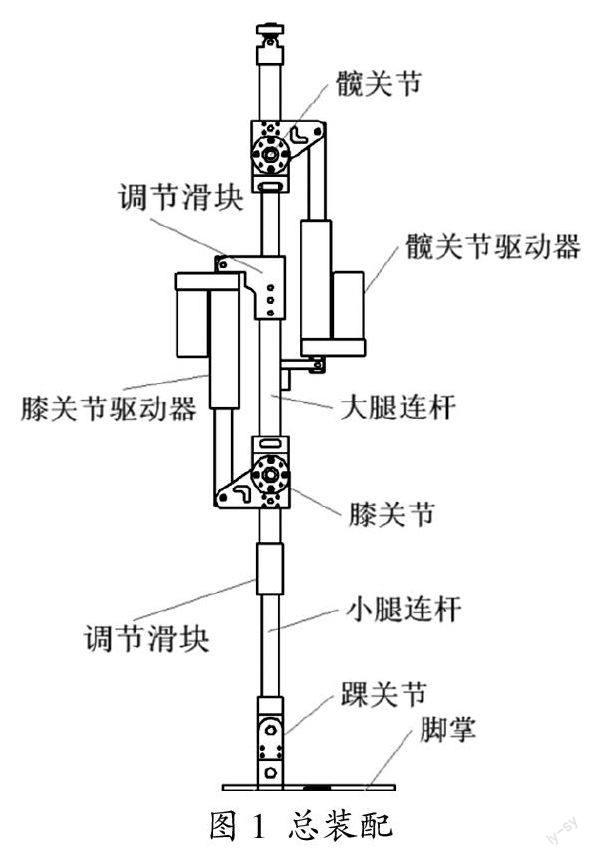
外骨骼機器人的設計目的是為了幫助人體下肢助力行走,機械結構示于圖1。其結構主要由以下幾部分組成:腰部支撐結構,目的是輔助支撐人的身體,腰部支持鉸接,以減少負重機器人對人體腰部的壓力,具有一定的承載能力;髖關節和膝關節關節驅動電機,為人體的行走提供原始的助力;股骨連桿和小腿連桿,這兩個部分都起到支撐和連接的作用,它方便安裝和調試各種傳感器,通過安裝在大腿骨連桿上的調節升降機構幫助他們調整高度,適應不同身高的人穿著這款助力機器人;腳踝和腳踏板,將人體重量傳遞到地面。
2 機器人的控制系統設計模型
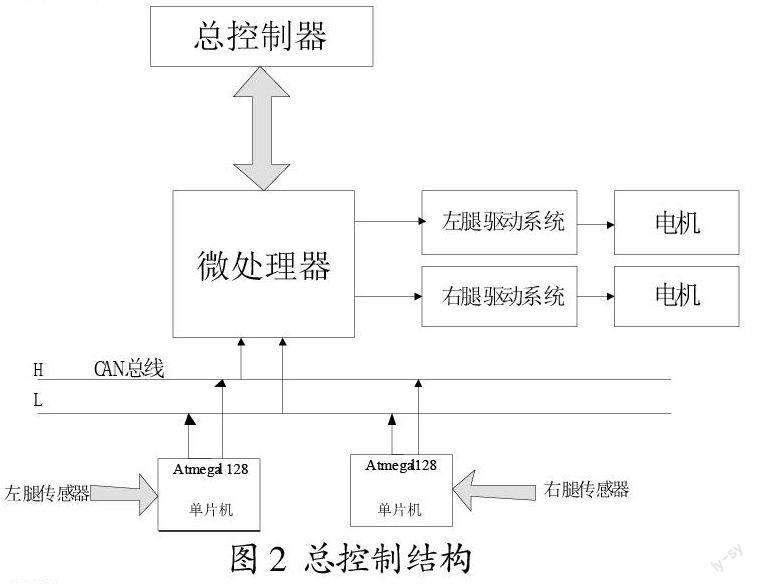
通過各種傳感器采集到的人體的運動和位置信息首先由微處理器進行預處理,然后傳輸到總控制器進行數據分析和處理,總控制器處理的結果由總控制器傳輸至微處理器,再由微處理器對電機驅動系統發出具體控制命令,實現實時監測和控制的目的。
2.1 傳感器
根據外骨骼機器人功能和應用場合的需求,采集系統需要以下四類傳感器:壓力傳感器,加速度傳感器,重力感應器和陀螺儀。壓力傳感器安裝在左側和右側腳的鞋底,作用是用來測量足底壓力;加速度傳感器安裝在兩腿中間,用于測量人體抬步時的加速度;陀螺儀安裝在腰部的中間部位,重力感應器安裝在髖關節,兩種傳感器相互結合被用來確定人體的中心重心位置和判斷身體是否處于平衡狀態。四種類型的傳感器之間的協調配合,能有效檢測人體的運動狀況和預測有意的人體運動,然后提供人體實時的援助。
2.2 控制總線與驅動系統
下肢外骨骼通常使用的驅動方式有三種:液壓傳動,氣壓傳動與電機驅動。他們各有優點和缺點。液壓驅動單位質量輸出功率大,傳動平穩,主動性高,且易于控制。但也有在控制響應速度和精度方面的不足。氣動驅動器使用安全,維護簡單,但它的信號傳遞比較慢。電機驅動控制模式簡單,直接,易于保證控制精度,運動精度高,響應快,方便維護和使用等諸多優點,因此文章設計的外骨骼機器人采用推桿電機驅動。
CAN代表“控制器局域網絡”,它是一種有效支持分布式控制或實時控制的串行通信網絡[5]。CAN具有優異的特性和高可靠性,這使得它非常適合工業過程監控互連設備和智能機器人控制領域。鑒于在此,驅動系統采用CAN總線來控制電機驅動器。
2.3 數據處理系統
所有傳感器采集到的數據信息如加速度、重心等均傳送至AtmegalCAN128單片機,單片機將信息整理后通過CAN總線傳輸至微處理器,微處理器充分發揮預處理能力將收到的數據提煉和加工,加工完成后把形成的新數據進一步傳送到總控制器,經C++編寫的應用算法程序來分析人的運動狀態和識別運動意圖,然后發出實時控制信號來控制電機,進而達到實時準確控制的目的。
3 實驗仿真
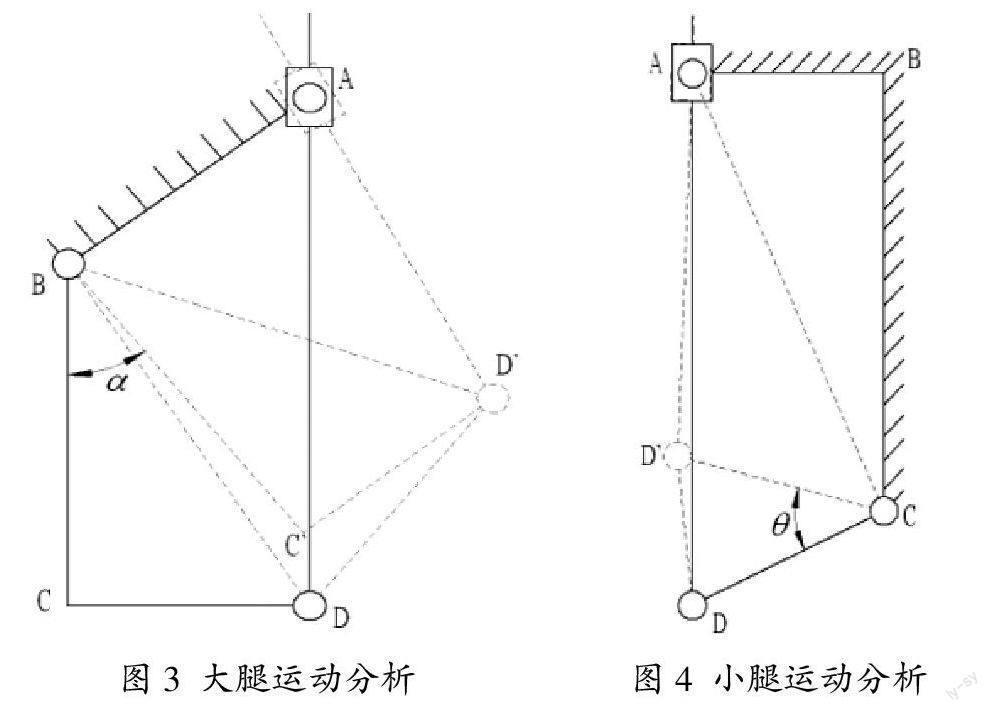
外骨骼機器人在髖關節和膝關節分別安裝了推桿驅動電機,這種電機將直線運動轉換成關節的旋轉運動,此運動形式更加接近于關節的運動模式。從圖3和圖4大腿和小腿的運動分析圖可以看出,人體在行走過程中,關節屈/伸運動擺動幅度α和θ和驅動器的行程有一定的關系。
利用外骨骼機器人的幾何尺寸和大腿繞髖關節運動的角度(α角) 、小腿繞膝關節運動的角度(θ角) ,我們借助matlab編程求出邊長AD到AD的變化范圍,DD就是所求驅動電機的行程。得出的電機驅動器行程和腿部關節運動角度的關系如圖5所示。從圖中可以看出,要想使關節的運動角度為0.15π rad時,驅動電機的行程大約為0.159m,這可以為電機的行程控制和選型提供一定的理論依據。
4 總結
文章主要介紹了下肢外骨骼機器人的機械結構和控制模型的設計和分析。有效的信息通過各種傳感器收集到控制器進行運動狀態和意圖的分析,然后準確地實施行走援助。通過實驗和驗證,證明了該機器人可以實時監測人體運行狀況以及實時控制的能力。我們的外骨骼機器人的設計目的是為下肢行走提供助力,并對后續研究具有一定的參考價值。
參考文獻
[1]王志鵬,郭險峰.穿戴式下肢外骨骼康復機器人機械設計[D].北京航空航天大學.2012
[2]丁兆義.外骨骼機器人設計和控制系統研究[D].東南大學.碩士學位論文.2008
[3]吳鍵波.下肢助力機械腿孔空間力系機械研究[D].華南理工大學.碩士學位論文.2012
[4]H Kazerooni,Jean-Louis Charles Racine,Lihua Huang,RyanSteger. On the Control of Berkeley Lower Extremity Exoskeleton( BLEEX)[C]/ /Proceedings of the 2005 IEEE International Con-ference on Robotics and Automation,Barcelona,Spain,2005.
[5]韓成浩,高曉紅.CAN總線技術及其應用[D].吉林建筑工程學院,2010.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17