微小型救援機器人機械手設計
2014-03-26 07:32:08楊立松柳虹亮譚海東
長春工業大學學報 2014年2期
楊立松, 朱 麗, 柳虹亮, 譚海東
(1.長春工業大學工程訓練中心,吉林長春 130012;2.吉林農業大學信息化教學與管理中心,吉林長春 130118)
0 引 言
微小型救援機器人憑借其結構緊湊、應用范圍廣、適應能力強等諸多優點,在探測、反恐防爆以及救援等領域都有廣泛應用。在具體的工作環境下,機械手的結構設計一定程度上決定了任務的成敗,所以,機械手的設計顯得更為重要。對于微小型救援機器人,其工作特點是要求要有較高的成功率,所以,設計一種能夠適應救援環境的機械手已顯得尤為必要[1]。
微小型救援機器人的機械手是微小型救援機器人非常重要的組成部分。通過設計將一個或者幾個機械手安裝在可以移動的平臺上,這樣的設計結構使設計的機械手在幾乎擁有了無限大的工作空間的同時也獲得了高度的運動冗余性。該機械手具有的移動和操作功能也使它明顯優于傳統的機械手。
為了提高機械手的綜合適應能力,首先,通過對現有得到廣泛應用的微小型救援機器人的工作特點進行分析,設計了一種獨特的機械手,此機械手是以六自由度手臂為依托,擬用電機驅動齒輪傳動,這樣即能夠保證機械手的結構緊湊,又能保證在救援環境復雜的情況下仍具有較高的傳動精度。其次,由于微小型救援機器人的工作環境具有明顯的特殊性,為了保證手臂的剛度、強度和明顯減輕手臂的整體重量,選用航空鋁6061作為外部殼體支撐部件的材料。再次,為保證傳動精度和效率,通過比較最終選擇45#鋼作為齒輪材料[2],并采用齒輪和連桿結合的機械手設計方案。最后,對機器人整體做了三維實體建模,為機械手的仿真分析提供必需的樣機模型。
經過實際應用和測試,機械手的結構緊湊輕便,能夠很好地達到設計要求。
1 微小型救援機器人機械手的工作原理分析
1.1 機械手的自由度形式分析
為了能夠滿足救援任務,物體姿態的變化和位置變化都要求必須被實現。為完成此項任務要求,設計的機器人機械手的關節工作空間內的自由度形式示意圖如圖1所示。

圖1 各個關節在空間內的自由度形式示意圖
為滿足能夠在加大工作空間工作的要求,基座設計有一個繞z軸方向的自由度1,用來調節機械手到達不同抓取位置與釋放位置的方向[3];為了滿足機械手末端能夠到達遠近不同的位置要求,設計了大臂、小臂3個自由度2,3和4;因為救援物體的存在姿態可能會不同,設計增加了一個腕部旋轉自由度5;由于要完成抓取與釋放動作,設計了末端夾持器的自由度6。
根據上述自由度形式分析,設計的微小型救援機器人的操作基本結構主要由5部分構成,包括末端機械手、基座、大臂、小臂以及手腕。大臂與基座間的仰俯運動、基座自身的旋轉運動、大臂與小臂的仰俯運動、腕部與小臂之間的仰俯運動,還有腕部的旋轉運動,末端機械手末端夾持器的夾取運動是具體的關節運動形式。將救援機器手設計為6自由度的形式,這種形式具有明顯的操作靈活、工作空間廣等優點,能夠滿足微小型救援機器人特殊工作環境的需要。
1.2 機械手的工作空間分析
為解決大多數救援機器人工作空間受限和控制精度不高的問題,依據實際需要,文中微小型救援機器人機械手的整體尺寸控制在長×寬×高為280 mm×280 mm×400 mm以內,機械手最大有效工作長度約340 mm,如圖2所示。

圖2 微小型救援機器人機械手的關節工作空間示意圖
經過對工作空間的分析,設計了合適的結構及尺寸,為實際制造奠定了基礎。
2 機械手的部件設計及傳動方式的選擇
2.1 機械手的基本組成
基座、大臂、小臂、腕部和末端執行器組成是機械手的重要組成部分,其中,末端執行器由一對微型步進電動機、一對鉗體、四根驅動連桿、兩個墊片和一個法蘭盤加之機械手殼體一起組成。
為了滿足對微小型救援機器人動作的精準快速的控制,文中設計的末端執行器如圖3所示。
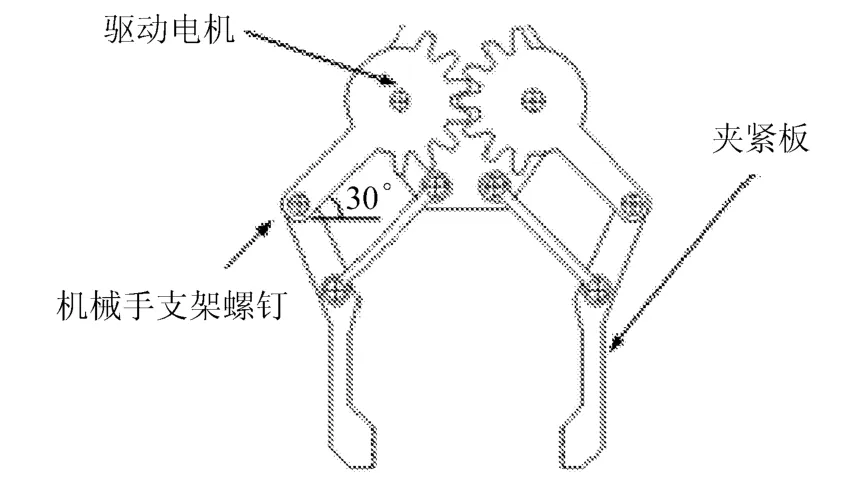
圖3 末端執行器
2.2 微小型救援機械手的關節設計
機械臂的設計是在參考同類型機械執行器的基礎上進行的,力求做到體積小、質量輕、剛性好、負載力滿足要求的特點。設計的各環節部件經過分析計算及強度校核,其中之一的二維圖如圖4所示。

圖4 微小型救援機器人機械手關節二維圖
2.3 機械手的驅動力求解
為了選擇合適的驅動電機,對機械手的各個部分進行類似末端執行器的受力分析,其受力簡圖分析如圖5所示。

圖5 機械手末端加持器受力分析圖
首先,通過計算確定機械手末端夾持器對被夾持物體的作用力N,設定夾緊板轉動30°,計算兩夾緊板所能夠承受的重量。此時,機械手的中部兩板沒有與被夾持物體接觸,考慮到重心在中部,假設被夾持物體的重力作用集中在端點[4]。查表得摩擦因數μ通常取0.5,根據作用力的平衡,由圖5得:

為保證絕對安全將重物設為10 N(設重力加速度g=10 m/s2),機械手的受力分析簡圖見圖5,夾緊板對齒輪嚙合處作用力為F1,F2,其方向通過O點并與夾緊板成60°,且L1=45 mm,L2=32 mm,L3=80 mm。

在O1點力矩和為零∑MO1=0,即:

由式(1)和式(2)得出機械手的驅動力

考慮到杠桿傳動的效率以及齒輪傳動的效率,取機構傳動的效率η為0.84,故此機構的實際驅動力為:

2.4 微小型救援機器人機械手驅動方式及減速機構的設計
對位置精度要求較高以及負載力矩較大是微小型救援機器人的顯著特點,所以機器人手臂關節部位均選用步進電機進行驅動,步進電動機電機旋轉的角度正比于脈沖數,在停轉時具有最大的轉矩,并且具有優秀的啟停和反轉響應。機器人手臂所采用的步進電機提供自帶的減速裝置,通過測試可滿足機器人手臂運轉所需的轉矩和轉速,可縮減成本,且易于安裝和保養。
2.5 微小型救援機器人機械手的傳動方式及材料選擇
綜合考慮手臂的結構形式、外部結構尺寸以及對手臂剛度、強度、靈活度的要求,選擇齒輪傳動作為傳動方式,這樣既保證了外部結構尺寸,又保證了傳動的效率,增加了傳動的可靠性,并且在手臂上安裝力矩限制機構,能夠實現對過載力自動保護,提高了系統的安全性。
在綜合考慮機器人手臂的傳動方式和結構形式,同時對可能合適的材料進行分析以后,選用了航空鋁6061作為外部殼體支撐和部件的材料[5],選用此材料既能滿足手臂的強度和剛度要求,又能減輕手臂的整體重量。通過比較最終選擇45#鋼作為齒輪材料,其它內部零件的材料也選擇45#鋼[6]。
3 微小型救援機器人機械手三維實體建模
在機械手機構設計時,不但要合理地分配尺寸,保證尺寸的協調和裝配的順利進行,還要保證模塊化的關節運動不受干涉。同時,注意其造型是否美觀,整體綜合效果是否滿足要求。通過對這些問題的分析總結,三維造型軟件Catia就可以很好地解決這些問題[7]。
利用工程制圖軟件Catia按照1∶1的比例建立三維實體建模。三維實體模型如圖6所示。
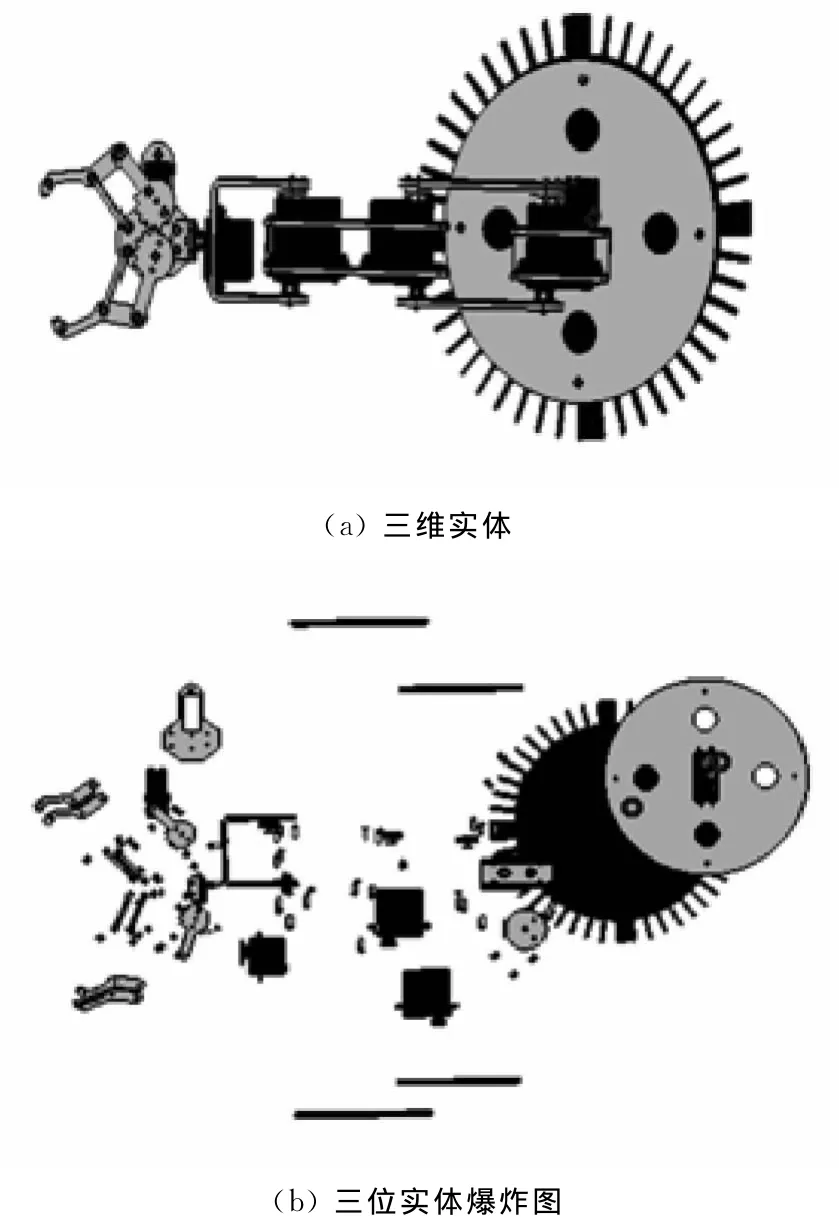
圖6 三維實體模型
基于Catia三維建模軟件,對微小型救援機器人手臂的傳動機構進行參數化建模,并對其它關鍵零部件進行三維實體建模,實現了手臂參數化建模與自上而下的救援機器人手臂的虛擬裝配[8]。為手臂的仿真分析提供樣機模型,為微小型救援機器人手臂的優化設計提供了參考[9]。
4 實驗與分析
為了驗證已設計的機械手各部件之間的配合情況是否符合要求以及能否完成指定的抓取任務,對機械手進行實體試驗。
在實驗室中,模擬了微小型救援機器人的工作現場,對微小型救援機器人系統進行了聯機調試,并對其進行了實際應用,實驗如圖7所示。

圖7 機械手抓取及運動實驗
仔細觀察微小型救援機器人的實際工作情況,該機器人機械手能夠實現對既定目標物體的精準定位并完成抓取,并且能夠迅速及時地將物品帶離現場,具有反應快速、靈活、可靠性高等優點。對于許多要求在惡劣環境下從事探測和防爆工作的人員,該機器人可以取代人進入到工作地點和完成任務。
實驗結果表明,微小型救援機器人能夠完成在一定條件下的防爆救援任務,證明了設計的合理性,能夠滿足設計的要求。
5 結 語
設計了微小型救援機器人的機械手,對其進行了結構設計,能夠很好地抓取和釋放目標物體,分析了機械手的工作空間,針對其機動能力、機械手的結構強度、抓取能力,選取了合理的驅動方式和材料,并對機械手進行了三維實體建模,為手臂的仿真分析提供樣機模型,也為微小型救援機器人手臂的優化設計提供了基礎和借鑒。試驗表明,該機械手具有靈活、快速的優點。該機器人可以取代人進入到許多惡劣環境從事探測和危險排除工作,該機械手能夠達到設計的工作空間范圍,能夠滿足控制性能指標要求。綜上所述,所設計的小型救援機器人機械手達到了設計要求。
[1] 柳虹亮,蔡赟,姜大偉.移動機器人控制系統硬件設計與開發[J].長春工業大學學報:自然科學版:2011,32(6)543-547.
[2] 周惠明.關節型機械手的結構創新設計[J].煤礦機械,2007,28(10):17-19.
[3] 王占禮.仿人按摩機器人手臂結構設計及改進[J].機械設計,2011(1):58-70.
[4] 陳航,殷國.工業機器人模塊化設計研究[J].機器人技術,2009,36(3):56-58.
[5] 劉永平.小型雙足步行機器人試驗研究[J].河南工業大學學報,2006,9(8):20-25.
[6] 周惠明.關節型機械手的結構創新設[J].煤礦機械2007,28(10):17-19.
[7] 曾洪江,黃聰.CATIA V5機械設計從入門到精通[M].北京:中國青年出版社,2004:10-200.
[8] 陳幼平,馬志艷,袁楚明,等.六自由度機械手三維運動仿真研究[J].計算機應用研究,2006(6):205-207.
[9] 左久林,鄧麗君,王艷春,等.大型排爆機器人技術研究[J].微計算機信息,2010,11:159-160.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
