光電跟蹤伺服系統機械時間常數頻域辨識
2014-03-26 07:33:06趙建川葛仁超周俊鵬
長春工業大學學報 2014年3期
趙建川, 葛仁超, 周俊鵬, 李 焱
(1.海軍駐長春地區航空軍事代表室,吉林長春 130033;2.長春工業大學電氣與電子工程學院,吉林長春 130012;3.中國科學院長春光學精密機械與物理研究所,吉林長春 130033)
0 引 言
公式法由傳統的電機微分方程出發,并沒有給出具體實施方案和實施過程,只是利用電流與時間的關系圖得到電流值的63.2%對應的時間即為機械時間常數Tm[1]。電機空載條件下運行,測出空載機械特性,從而計算出電動機轉動慣量,進而從導出公式中計算出Tm,但此方法只能適應具有大轉動慣量的電機,沒有普遍意義的實用價值。構造更復雜的三參數最小二乘線性方程,僅僅從理論出發,沒有實際工程背景,并不具有實用價值[2-3],利用掃頻法測出系統輸入與輸出的關系,在MATLAB中的simulink環境下開發遞推最小二乘在線系統辯識,有其應用的局限性,精度不是很高,卡爾曼濾波辯識算法雖然給出來精度,但運算量過大,不利于地基座伺服系統對Tm的獲取[4]。另外,有些方法導出Tm和時間的積分關系,將積分轉化為梯形面積[5]。有些舵機伺服系統根據跟蹤精度提出了辨識、測試它的摩擦和間隙非線性及對其進行補償的方法,跟蹤誤差得以改善[6-7]。分析機械時間常數與機座號的關系,得出永磁直流力矩電機機械時間常數隨機座號增大而減小[8]。模糊控制系統辨識與角加速度傳感器測速方面也沒有完善的介紹[9-10]。設計并利用MATLAB函數擬合方法,方便靈活地解決了上述傳統方法在獲取電機機械時間常數不易的難題。該項技術成功的應用在XX項目中,其擬合頻域法對獲取電機機械時間常數有很好的通用性和借鑒性。
1 伺服系統軟件實現
由旋轉變壓器反饋出來的速度碼值用aa_0來表示,速度環開環輸出碼值用axk來表示。在TL16C554C口中斷程序中設定axk的碼值,編碼器的采樣周期0.002 5s,這樣就可以得到旋轉變壓器反饋速度值aa_0。在程序的主函數中設置輸出函數fprintf(fp1,"%04d%08.4lf%06ld\n",++Store_Counter,aa_0,code a_0),便于讀出旋轉變壓器的值。在CCS3.3中通過選擇存盤操作可以得到DAT文件,即可直接用word的EXCEL文件打開,選擇適當值。
2 頻率法的理論依據
根據電壓平衡方程式和負載為零時轉矩平衡方程式,以及機械時間常數、電氣時間常數計算公式可得:
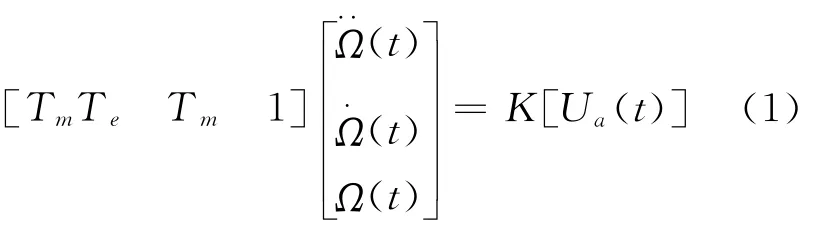
式中:Tm——機械時間常數;
Te——電氣時間常數;
Ω(t)——電機角速度;
Ua——電機端電壓。
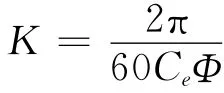
式中:Ce——電動勢常數;
Φ——磁通量。
零初始條件下對式(1)做拉氏變換,可得
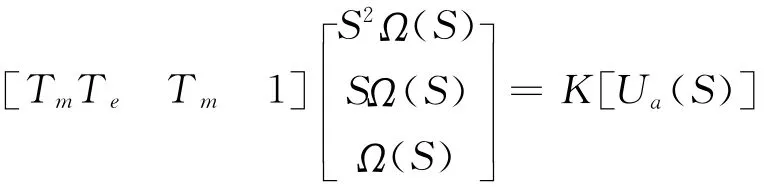
易得兩個極點為:
將拉氏變換式轉換成頻率表達式為:

將f=0和f=f時兩頻率代入上式中做比,并代入所求得的兩個極點可得
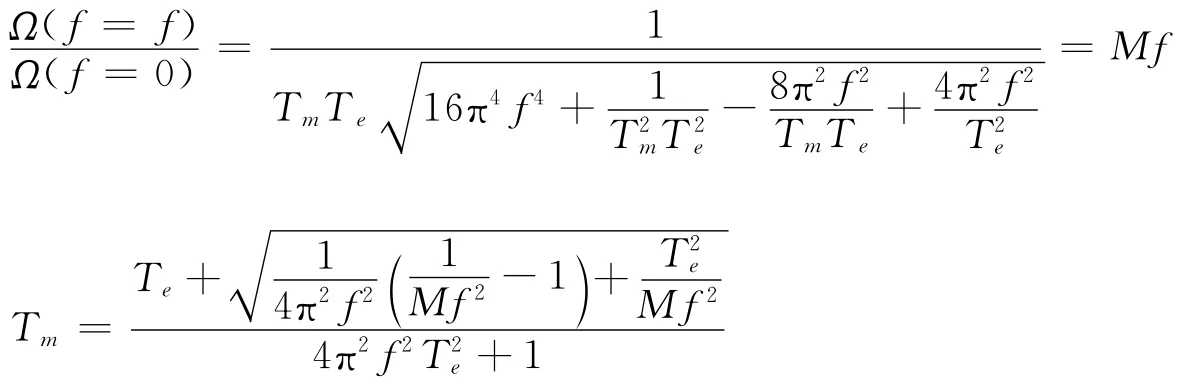
此公式作為頻域法擬合依據。
3 實 驗

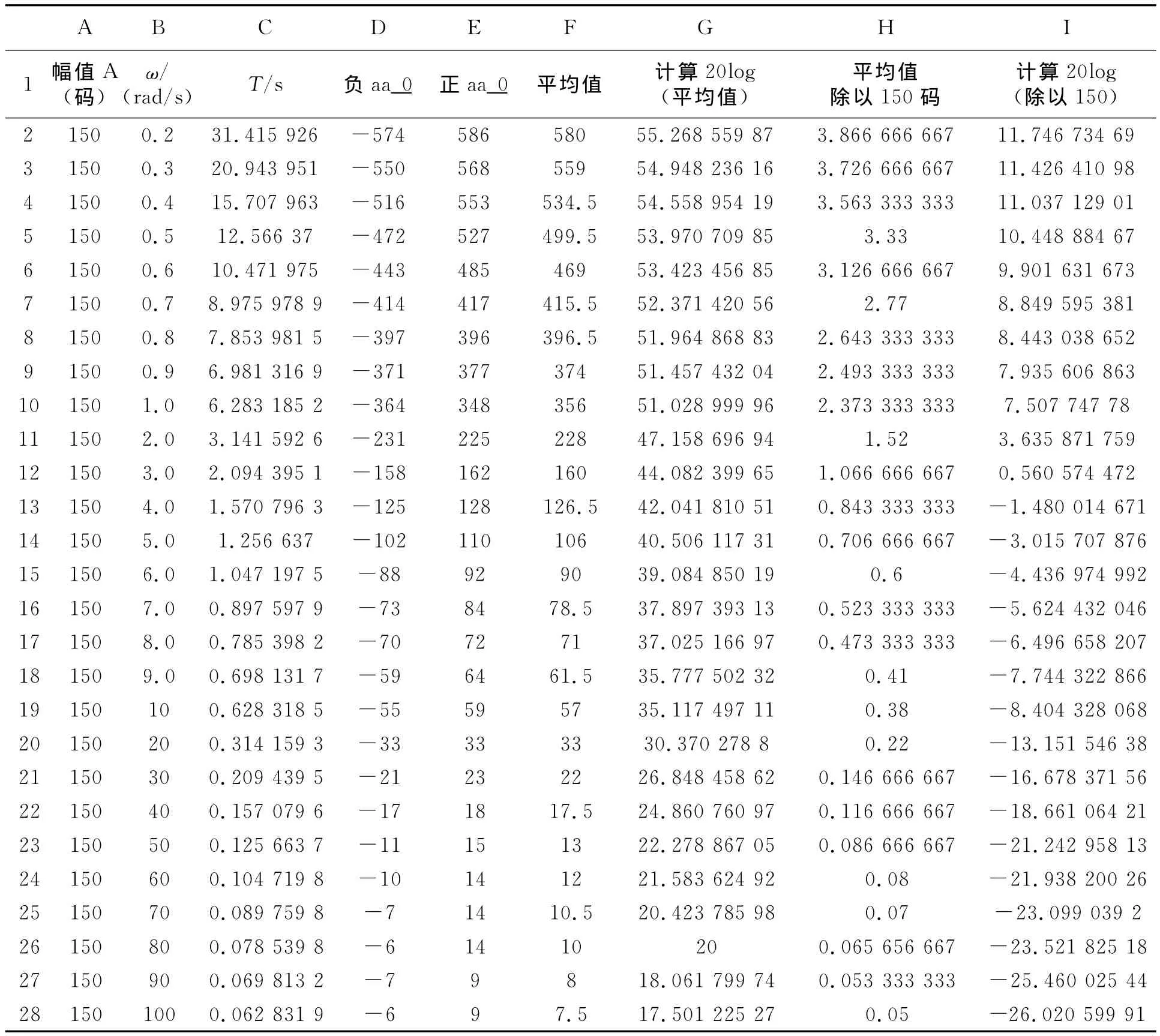
表1 正旋引導頻率響應
將表1中的相關值輸入到MATLAB中用對數函數擬合,擬合圖如圖1所示。
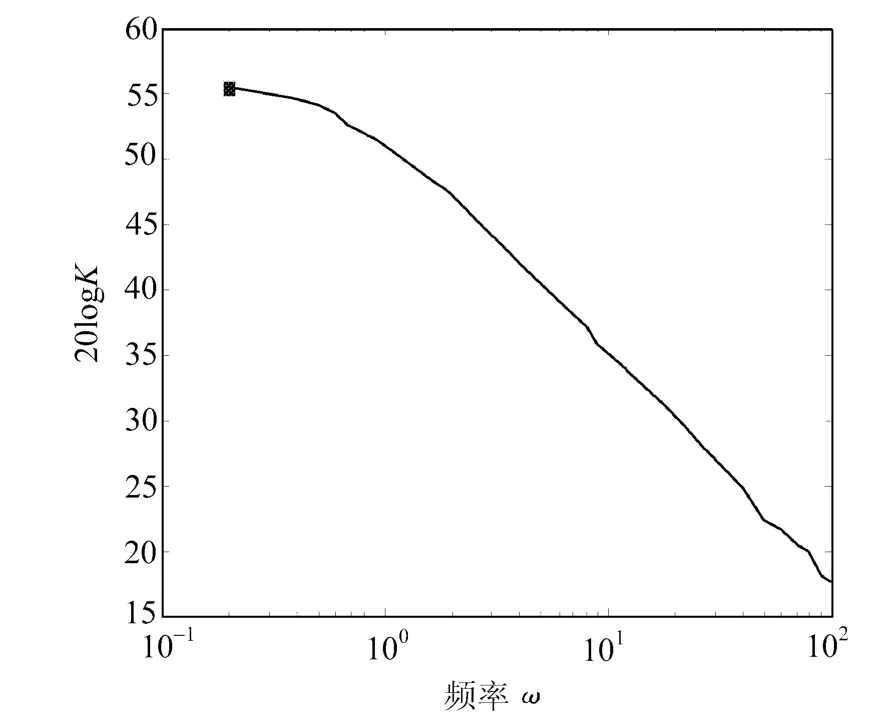
圖1 頻率響應擬合圖
所擬合函數縱坐標為20log((正aa_0-負aa_0)/2),橫坐標為ω。從BODE圖中看出縱軸交點,令20logK等于縱軸交點坐標值,從而計算出K值,再除以150就可得到所需的值K0。由此值做一條橫軸平行線,與轉折漸近線的交點所對應的值取倒數記為機械時間常數Tm。計算得K0=4.5,Tm=1.7s,Te可通過萬用表測音圈電機連同其到功率級段的導線兩端的電阻和電感,實測得Te=L/R=0.002s。最終得到等效電機及負載傳遞函數:

4 結 語
用頻率法擬和彌補了公式法獲取Tm上的種種不足,并且克服了其它方法獲取Tm困難、不易工程實現的難題。同時方便地得到放大倍數K,電機電氣時間常數Te可通過萬用表測得,從而得到電機傳遞函數。此方法在實際應用中方便、可行、有效,能夠滿足某項目對Tm的精度需要。對系統辯識具有很好的通用性和借鑒性。
[1] 菜莎莎,毛曉明,陳志勇,等.同步電機調速系統參考辯識研究進展與展望[J].廣東電力,2012,25(10):29-32.
[2] 馮清青.永磁直流電機測試系統研究[D]:[碩士學位論文].哈爾濱:哈爾濱工程大學,2012.
[3] 劉瓊.直流伺服系統模型及其辯識[J].電氣傳動自動化,2012,6(34):18-21.
[4] 王建峰,張天宏.基于MATLAB/XPC的直流電機參數辯識及雙閉環控制研究[J].2011,12(30):32-36.
[5] 魏彤,郭蕊.自適應卡爾曼濾波在無刷直流電機系統辯識中的應用[J].光學精密工程,2012,10(20):2308-2314.
[6] 消前進,賈宏光,章家保,等.電動舵機伺服系統非線性辨識及補償[J].光學精密工程,2013,21(8):2038-2047.
[7] 史建偉,史永麗.基于自抗擾動控制的伺服系統輸出間隙補償研究[J].電力學報,2009,24(2):105-108.
[8] 張文海,徐麗.永磁直流力矩電動機機械時間常數測試分析[J].微電機,2009,42(1):76-81.
[9] 郭曉鋒.Fuzzy-PID控制在風力發電機上轉速控制中的應用[J].長春工業大學學報:自然科學版,2004,25(2):51-54.
[10] 梁偉,馮楓,鮑學良,等.角加速度傳感器及其應用[J].長春工業大學學報:自然科學版,2012,33(3):312-316.
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
兒童故事畫報(2019年5期)2019-05-26 14:26:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12