基于長基線系統(tǒng)絕對測陣的測距修正算法優(yōu)化
2014-04-03 08:30:42張宏偉
大慶師范學(xué)院學(xué)報(bào) 2014年3期
張宏偉,林 芳
(大慶師范學(xué)院物理與電氣信息工程學(xué)院,黑龍江 大慶 163712)
0 引言
絕對測陣是整個長基線水下定位導(dǎo)航測量中不可或缺的環(huán)節(jié),其精度直接影響導(dǎo)航定位精度[1-3]。系統(tǒng)測陣時采用的是“詢問-應(yīng)答-接收”方式測距,根據(jù)空間交匯原理對應(yīng)答器進(jìn)行定位,由于母船有速度,導(dǎo)致發(fā)射和接收點(diǎn)分離,所測得的測距數(shù)據(jù)與實(shí)際距離存在偏差,從而影響定位的精度。本文通過對測距修正算法進(jìn)行近似優(yōu)化提出新的算法公式,基于測陣模型的仿真比較表明,該方法可行,海試證明能有效降低修正誤差。
1 測量距離修正原理
長基線水下定位導(dǎo)航系統(tǒng)絕對測陣?yán)谩八晳?yīng)答測距、空間球面交匯定位”原理進(jìn)行工作[4-5],系統(tǒng)在靜止情況下定位。由于在絕對測陣過程中,測陣母船是運(yùn)動著的,而系統(tǒng)又是采用詢問—應(yīng)答方式測距,假定母船作勻速直線運(yùn)動,由于系統(tǒng)采用“詢問—應(yīng)答”方式測距,故發(fā)射和接收不在同一點(diǎn)上,這樣水聲收發(fā)機(jī)所得到的測距數(shù)據(jù)實(shí)際上是兩個不在同一直線的距離之和,如圖1所示,即母船到應(yīng)答器1的實(shí)測距離為,而不是R11;同樣母船到應(yīng)答器2的實(shí)測距離為,而不是R21,所以有誤差。產(chǎn)生這種誤差的原因是母船速度,速度越大則誤差也越大,同時,各應(yīng)答器檢測并確認(rèn)詢問信號到發(fā)射應(yīng)答聲脈沖還有一定的時延,一般為10~20毫秒左右;水聲收發(fā)機(jī)檢測并確認(rèn)應(yīng)答信號的電路時延一般也有4~8毫秒。這些時延都將使得各測距值比母船到各應(yīng)答器的實(shí)際距離要大,因此,必須對其進(jìn)行修正,使各測距值統(tǒng)一歸算到發(fā)射時刻母船到各應(yīng)答器的距離。
推算出距離及時延引起的測距誤差的修正公式如下:

式中:
RiK——第K幀發(fā)射時刻母船到應(yīng)答器i的距離;
C——平均聲速;
RiK-1——第K-1幀發(fā)射時刻母船到應(yīng)答器i的距離;
C#——水聲收發(fā)機(jī)的預(yù)置聲速(通常為折算后的平均聲速);
τ#——水聲收發(fā)機(jī)的預(yù)置時延(通常設(shè)為0);
τ0——聲頭和水聲收發(fā)機(jī)的接收時延(可通過試驗(yàn)前計(jì)量得知);
τ'0——聲頭和水聲收發(fā)機(jī)的發(fā)射時延(可通過試驗(yàn)前計(jì)量得知);
τi——應(yīng)答器i的時延(可通過試驗(yàn)前計(jì)量得知)。
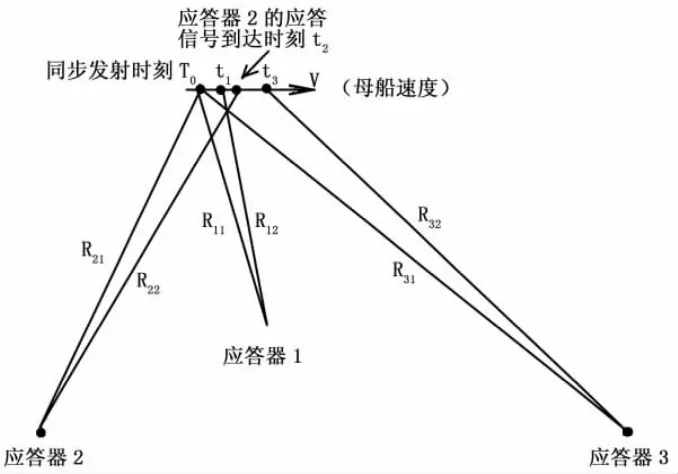
圖1 測量斜距修正示意圖
其中
式中的 RiK和RiK-1用和(第K-1幀水聲收發(fā)機(jī)通道i的測距讀數(shù))近似代替,將測距均值近似做為發(fā)射聲脈沖時刻母船到應(yīng)答器的距離,得到

2 測距修正公式
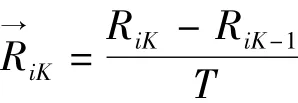
以一個目標(biāo)應(yīng)答器為例,對測距過程進(jìn)行分析,測距分析圖如圖2和圖3所示。其中O為目標(biāo)應(yīng)答器,a1、a2分別為第一幀詢問聲信號發(fā)射點(diǎn)與接收點(diǎn),b1、b2分別為第二幀詢問聲信號發(fā)射點(diǎn)與接收點(diǎn),T為聲信號發(fā)射周期,t1、t2分別為第一幀和第二幀水聲收發(fā)機(jī)所測的聲傳播時延(雙程),R11、R12、R21、R22分別為第一幀和第二幀聲信號往返所傳播的實(shí)際距離。
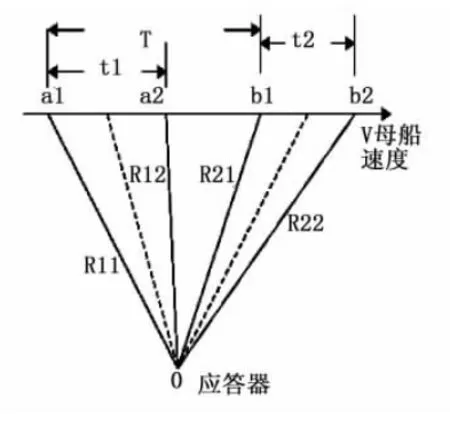
圖2 T>t1情況測距分析圖
圖3 T<t1情況測距分析圖
根據(jù)測距修正原理及測距分析圖,可以得到:


應(yīng)用在圖2中,可以等效于

而通過水聲收發(fā)機(jī)測距所反映出來的數(shù)據(jù)只是R#1和R#2,并不能得到真實(shí)的R21和R11。根據(jù)圖2中的時間關(guān)系,可以得到以下結(jié)論;
a1、a2間的時間為 t1,b1、b2間的時間為t2,a1、b1間的時間為 T,則有 a2、b2 間的時間為 T-t1+t2,這樣用(3)式可以得出如下等式;

整理后得到

如果將給上式兩邊同除以一個T,并將4式代入即:

由于a2、b2兩個接收點(diǎn)間隔時間為T-t1+t2,同時兩測量點(diǎn)臨近,母船以勻速直線方式運(yùn)動,可以把這個過程中母船對應(yīng)答器的徑向速度看做常量,記作,則有:

(8)式通用的描述可以表示為

同理圖3推導(dǎo)出來的公式與(9)式形式相同,考慮到模糊周期的因素,這里不做描述。
通過分析可知,僅根據(jù)水聲收發(fā)機(jī)測得的距離來解算徑向速度,把平均距離作為發(fā)射時刻母船到應(yīng)答器的距離,將會造成較大誤差,而優(yōu)化后算法能更近似相鄰兩測量點(diǎn)的徑向速度。
3 仿真分析
3.1 利用模擬對稱點(diǎn)的方法
我們模擬對稱點(diǎn)測量的測陣方法,如圖4所示,針對一個目標(biāo)應(yīng)答器S在其的四個相對對稱的方向上選取4個測量區(qū)域,每個區(qū)域測量8次,每次間隔15m,在測量區(qū)域內(nèi)母船保持5節(jié)的低速直線航行。
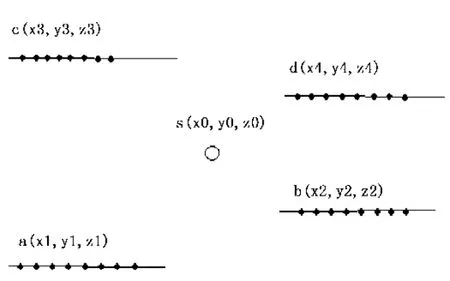
圖4 對稱點(diǎn)測陣分析圖
通過仿真我們得出公式(2)和公式(6)產(chǎn)生的測距修正誤差,如表1所示。這里選取平均聲速1500m/s,測距儀脈沖周期6秒,母船航速5節(jié)(2.5m/s)對目標(biāo)陣元S(3100,1700)進(jìn)行測試。

表1 測距偏差
表1反映出測距修正誤差在解算中是不可避免的,通過優(yōu)化近似新的測距修正公式造成的誤差較原來有較大幅度的降低,可見優(yōu)化近似后的公式對距離修正作用較明顯。
下面我們綜合由聲速測量誤差、GPS定位誤差、測時誤差和測距修正誤差共同作用的情況,比較公式(2)和(6)對絕對測陣精度的影響。選取水聲收發(fā)機(jī)和應(yīng)答器時延值為4ms和10ms,平均聲速1500m/s,測時誤差(-1ms,1ms),分別在聲速誤差(-2m/s,2m/s)、(-3m/s,3m/s)和 GPS 定位誤差(-3m,3m)、(-5 m,5 m)情況下做對比。
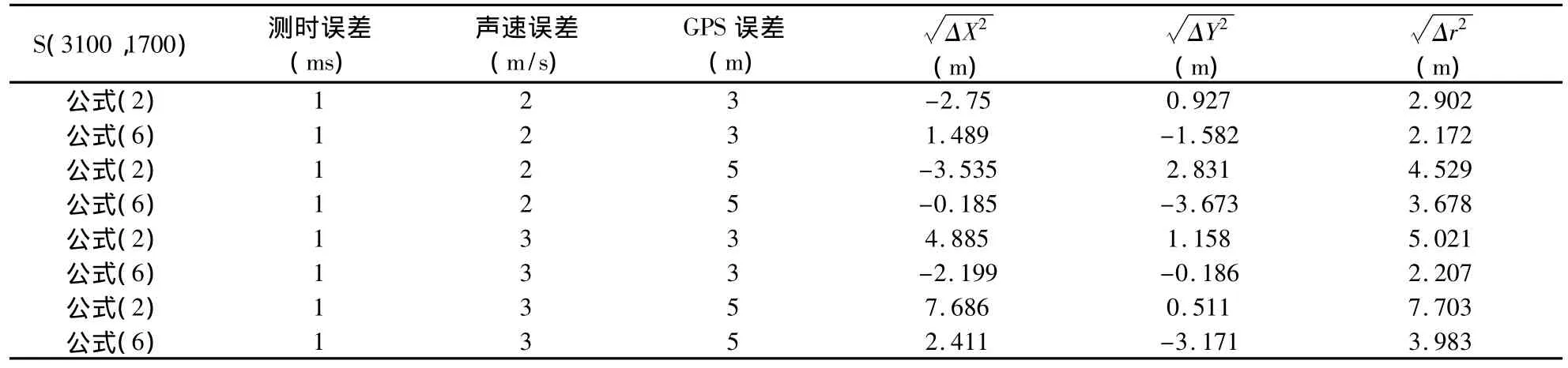
表2 誤差分析
從表2可看出在相同的隨機(jī)誤差作用下,公式(6)相比公式(2)能較為有效地提高絕對測陣的精度。由此可以證明,新測距修正公式能有效地降低近似解算造成的誤差。
3.2 海試驗(yàn)證
圖(5)是在南海某海域試驗(yàn)中使用半矩陣型航路測陣后給運(yùn)動目標(biāo)導(dǎo)航的軌跡,其中1#、2#、3#、4#、5#和6#潛標(biāo)構(gòu)成了一個2km*2km+2km*1km小跟蹤陣,利用半矩形陣航路對海底應(yīng)答器進(jìn)行測陣。測陣完畢,利用測陣結(jié)果對目標(biāo)船進(jìn)行導(dǎo)航。良好海況,目標(biāo)船以小于5節(jié)航速在陣中低速航行。
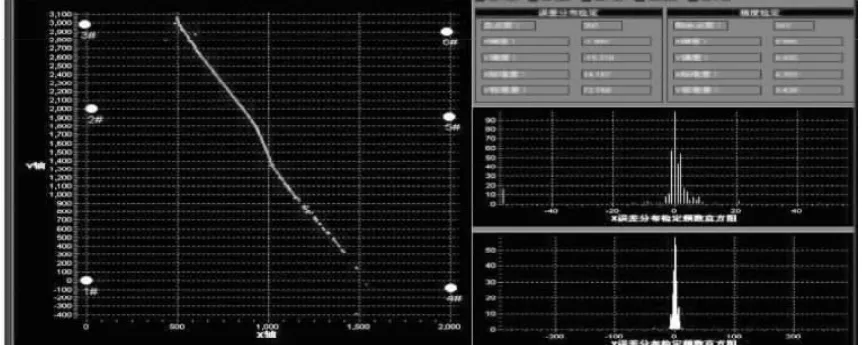
圖5 海試結(jié)果圖
測陣時,航路航行時間大約為1.2個小時。同時測得系統(tǒng)對運(yùn)動目標(biāo)導(dǎo)航精度滿足水聲定位系統(tǒng)的精度要求,從導(dǎo)航軟件可以看出,運(yùn)動目標(biāo)軌跡與GPS的軌跡幾乎重合,完全符合水聲定位系統(tǒng)的精度要求,證實(shí)了半矩形陣測陣使用成功。為大范圍導(dǎo)航定位打下了堅(jiān)實(shí)的基礎(chǔ)。
4 結(jié)語
通過對絕對測陣時,由于算法不同導(dǎo)致誤差相差很大,在相同的因素影響下,改進(jìn)的測距修正公式在理論上能夠有效地減小誤差,對長基線系統(tǒng)的測陣和導(dǎo)航的定位解算精度有一定程度的改進(jìn),具有良好的工程推廣應(yīng)用價(jià)值。對其他水聲定位系統(tǒng)的測距修正具有借鑒意義。
[1]李啟虎.水聲學(xué)研究進(jìn)展[J].聲學(xué)學(xué)報(bào),2001,26(4):295-301.
[2]李守軍,包根生,吳水根.水聲定位技術(shù)的發(fā)展現(xiàn)狀與展望[J].海洋技術(shù),2005,24(1):131-135.
[3]Kussat N.H.,Chadwell C.D.,Zimmerman R.Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J].IEEE Journal of Oceanic Engineering,2005,30(1):153-164.
[4]楊道軍,許偉杰,翁國忠.船底運(yùn)動小直徑圓柱受力撓曲分析[J].海洋工程,2006,24(4):49-55.
[5]陳子,許楓.GPS時鐘同步在水下定位系統(tǒng)中的應(yīng)用[J].微計(jì)算機(jī)應(yīng)用,2008,29(8):86-89.
