長航時捷聯(lián)慣導(dǎo)重力擾動影響及補償
2014-04-03 07:32:28楊小步
計算機工程與應(yīng)用 2014年11期
關(guān)鍵詞:系統(tǒng)
叢 琳,趙 忠,楊小步
CONG Lin,ZHAO Zhong,YANG Xiaobu
西北工業(yè)大學(xué) 自動化學(xué)院,西安 710129
School of Automation,Northwestern Polytechnical University,Xi’an 710129,China
1 引言
捷聯(lián)慣導(dǎo)系統(tǒng)的誤差隨時間積累,在要求持續(xù)工作幾十個小時以上的長航時慣性導(dǎo)航系統(tǒng)中這一特性表現(xiàn)得尤為突出。一些在短航時內(nèi)忽略掉的慣導(dǎo)誤差源隨著高精度慣性器件的發(fā)展和工作時間的延長而引起慣導(dǎo)系統(tǒng)較大的誤差,并成為主要的誤差源,重力擾動就是其中一項[1-5]。在傳統(tǒng)導(dǎo)航解算時通常采用正常重力作為重力有害加速度的補償,在慣性器件精度不高的情況下,重力擾動的影響可以忽略[6-7]。但隨著高精度慣導(dǎo)系統(tǒng)的發(fā)展,慣性元件陀螺和加速度計自身的精度得到了極大的提高,在長時間航行的高精度慣性導(dǎo)航系統(tǒng)中由重力擾動導(dǎo)致的慣導(dǎo)誤差已經(jīng)成為了慣性系統(tǒng)中最主要的誤差源[8],必須要進行重力擾動補償。Vanderwerf等[9]分析了在重力擾動很大的航線上其對慣導(dǎo)的影響,但僅驗證了速度誤差的影響;堯穎婷等[10]驗證了重力擾動的水平分量對捷聯(lián)慣導(dǎo)誤差的影響,但并沒有對重力擾動進行補償;李勝全等[11]仿真分析重力擾動矢量補償對慣導(dǎo)精度的提高效果,但假設(shè)重力異常與垂線偏差為均勻分布,且補償后的重力擾動為常值,這個假設(shè)條件太過理想。本文從導(dǎo)航解算的角度出發(fā),分析長航時捷聯(lián)慣導(dǎo)系統(tǒng)誤差受重力擾動的影響,在此基礎(chǔ)上對重力擾動進行非均勻B樣條建模并對導(dǎo)航解算過程進行補償,仿真結(jié)果表明了非均勻B樣條建模的正確性以及重力擾動補償?shù)挠行浴?/p>
2 重力擾動對捷聯(lián)慣導(dǎo)影響
重力作為慣導(dǎo)系統(tǒng)有害加速度通過加速度計感測進入慣導(dǎo)系統(tǒng),在導(dǎo)航解算中,重力補償之后的殘余重力將產(chǎn)生慣導(dǎo)誤差,系統(tǒng)殘余重力可表示為實際重力與正常重力之差,即為重力擾動:

式中,g為實際重力,γ為正常重力,δg為重力擾動。本文從捷聯(lián)慣導(dǎo)解算更新出發(fā),分別分析了重力擾動對姿態(tài)、速度和位置的影響。
導(dǎo)航坐標(biāo)系(n系)選用地理坐標(biāo)系東、北、天(ENU);b為載體坐標(biāo)系;i是慣性坐標(biāo)系;e表示地心地固坐標(biāo)系。
2.1 捷聯(lián)慣導(dǎo)姿態(tài)誤差分析
在捷聯(lián)慣導(dǎo)姿態(tài)更新中,根據(jù)文獻[12]可知姿態(tài)誤差方程為:

式中δKG為陀螺刻度系數(shù)誤差,δG為陀螺安裝角誤差,?表示姿態(tài)角誤差為坐標(biāo)系轉(zhuǎn)換矩陣,為陀螺輸出,εn為陀螺漂移在導(dǎo)航坐標(biāo)系中的投影,為指令角速度誤差,且:

式中L為所在地的緯度,RM、RN、h依次為載體所在地的子午圈半徑、卯酉圈半徑和海拔高度。
根據(jù)式(2)可知,引起姿態(tài)誤差的主要誤差源有陀螺輸出誤差,除陀螺誤差之外的誤差源是通過速度位置的耦合關(guān)系而作用于姿態(tài)的,表現(xiàn)于項。現(xiàn)從捷聯(lián)慣導(dǎo)速度更新的速度誤差源進行分析。
2.2 捷聯(lián)慣導(dǎo)速度更新誤差分析
捷聯(lián)慣導(dǎo)解算時系統(tǒng)的速度更新誤差方程為:
式中,δKA為加速度計刻度系數(shù)誤差,δA為加速度計安裝角誤差,fn表示加速度計輸出,?n為加速度計零偏在導(dǎo)航坐標(biāo)系下的投影,δgn為重力擾動。
由式(6)可知,引起捷聯(lián)慣導(dǎo)系統(tǒng)速度誤差的誤差源主要有加速度計輸出誤差([δKA]+[δA])fn+?n,前一時刻累積的速度誤差δVn,速度位置的耦合誤差以及重力擾動δgn的影響。
2.3 捷聯(lián)慣導(dǎo)位置更新誤差分析
捷聯(lián)慣導(dǎo)解算時系統(tǒng)的位置更新誤差方程為:
式中L、λ分別為地理緯度和經(jīng)度。
由式(8)可知,引起位置誤差的主要誤差源為前一時刻的累積速度誤差δVn以及速度位置的耦合誤差。
經(jīng)過上面分析可以發(fā)現(xiàn):重力擾動可以通過式(6)引起捷聯(lián)慣導(dǎo)的速度更新誤差,速度誤差將通過式(8)造成系統(tǒng)位置更新誤差,進而通過式(2)引起捷聯(lián)慣導(dǎo)系統(tǒng)的姿態(tài)誤差,并且慣導(dǎo)誤差隨著時間的增加還會發(fā)散。
3 重力擾動補償
根據(jù)前面的分析可以看出,在傳統(tǒng)捷聯(lián)慣導(dǎo)中,重力加速度的補償是影響慣導(dǎo)精度的一個關(guān)鍵因素,一般可以根據(jù)地球正常重力模型得到的正常重力矢量進行補償。但在長航時高精度捷聯(lián)慣導(dǎo)系統(tǒng)中,重力擾動對慣導(dǎo)解算的影響不可忽略,必須針對重力擾動矢量進行重力補償。
在進行重力擾動補償?shù)臅r候,需將其分解到北向、東向和垂向。北向分量和東向分量可用垂線偏差表示,即
式中ξ為南北方向垂線偏差,η為東西方向垂線偏差,g0為正常重力值,Δg為重力異常,N為水準(zhǔn)面高度,R為地球半徑。
重力異常Δg通過比力方程進入慣導(dǎo)系統(tǒng)后作用于系統(tǒng)的高度通道,對水平定位精度影響不大[13],且由于高度通道是發(fā)散的,則在捷聯(lián)慣導(dǎo)系統(tǒng)中,重力異常的影響一般可忽略不計[14]。而垂線偏差對水平方向的定位誤差影響較大,一般地區(qū)的垂線偏差在10″左右,個別地區(qū)可以達到30″以上[15],這在慣導(dǎo)系統(tǒng)中引起的水平位置誤差在百米甚至千米以上,因此需要對其進行全面分析及補償。下文的重力擾動補償指的是對垂線偏差的補償。
重力擾動補償是在垂線偏差模型的基礎(chǔ)上對重力擾動的補償。在實際導(dǎo)航中,實時測量所有導(dǎo)航點的垂線偏差是不實際的,所以需要根據(jù)已知點的垂線偏差運用插值補償算法或其他算法估測未知點的垂線偏差,輔助慣性導(dǎo)航。而重力擾動在實際中的分布往往是不規(guī)則的,需要非均勻網(wǎng)格數(shù)據(jù)。所以本文采用非均勻B樣條最小二乘法對局部計算區(qū)域垂線偏差進行二維整體逼近,此方法能保證在垂線偏差局部特性不失真的前提下獲得計算區(qū)域垂線偏差的統(tǒng)一解析式,同時解得的垂線偏差具有連續(xù)性。
3.1 非均勻B樣條最小二乘法
對于二維區(qū)域[0 ≤x≤a,0≤y≤b],在 x方向插入等分節(jié)點:Δx:0=x0<x1<…<xn=a。那么,在 x方向上的B樣條函數(shù)[16]可表示為:

式中 Bi,μ(x)為B樣條基函數(shù),可表示為:
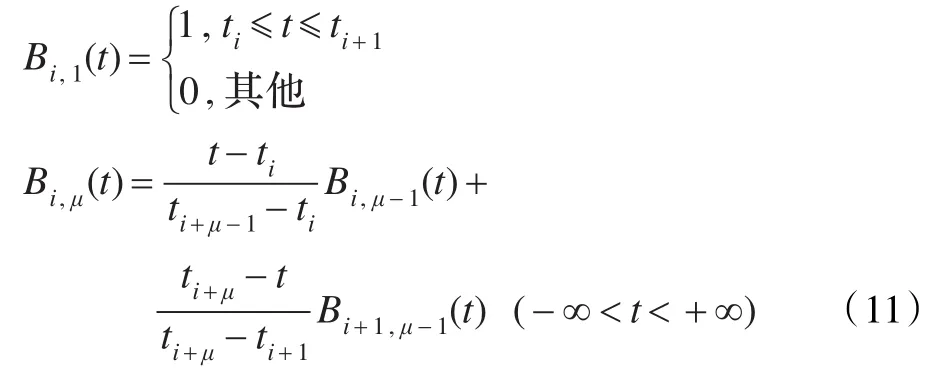
從式(10)(11)中可以看出,B樣條函數(shù)在每段區(qū)間上的部分只與相鄰部分控制頂點有關(guān),某一控制頂點的變動只會造成局部形狀的變化,并不會影響整體的模型變動,這樣,各段曲線就具有了相對的獨立性。
同理,在 y方向上插入等分點Δy:0=y0<y1<…<yn=b。在 y方向的B樣條函數(shù)為:

那么,二維區(qū)域xy平面的B樣條[17]可寫成Bx與By的張量積形式:
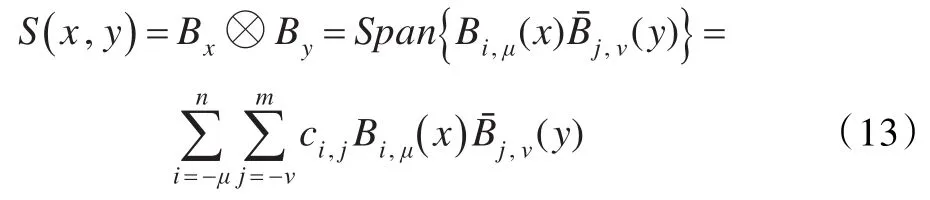
此時,根據(jù)已知節(jié)點矢量和數(shù)據(jù)點的參數(shù)值,通過式(13)便可以建立非均勻B樣條模型S(x,y),全體 S(x,y) 即構(gòu)成一個線性空間,接下來就可以求解未知控制頂點的線性最小二乘問題了,即在此空間中找出合適的S(x,y)使得其滿足:
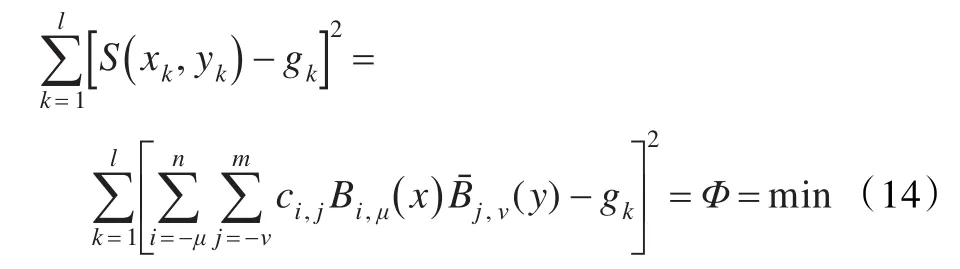
式中g(shù)k為實際得到的垂線偏差數(shù)據(jù)。即運用最小二乘法,令:

整理后可得:
求取范數(shù)極小解 ci,j,將得到的唯一系數(shù) ci,j帶入到式(13)中即為所求的非均勻B樣條模型。
3.2 重力擾動補償
運用上述非均勻B樣條最小二乘法計算得到的重力擾動δg,補償?shù)皆到y(tǒng)比力方程中再進一步進行導(dǎo)航解算,其原理流程簡圖如圖1所示。
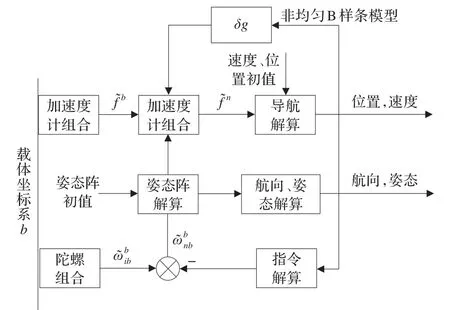
圖1 導(dǎo)航解算原理圖
4 仿真分析
4.1 重力擾動建模仿真
仿真條件:仿真模擬區(qū)域數(shù)據(jù)來自美國國家大地數(shù)據(jù)測量局提供的美國本土24°~58°N、230°~300°E,1'×1'的垂線偏差網(wǎng)格數(shù)據(jù),根據(jù)已知數(shù)據(jù)可得真實垂線偏差如圖2,表1所示。

圖2 垂線偏差變化各向分量

表1 垂線偏差真實值
采用B樣條建立模型時,將模擬區(qū)域分成9個小區(qū),各區(qū)選擇30個點來保證已知點盡量分散,采用非均勻B樣條進行仿真,所得各向垂線偏差如圖3,表2所示。
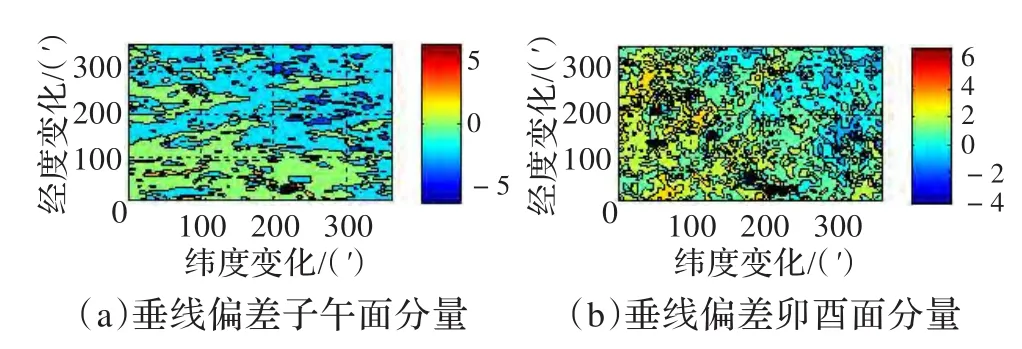
圖3 采用B樣條建模垂線偏差變化各向分量

表2 采用B樣條建模計算垂線偏差值
利用模型計算值對真實值進行補償,所得誤差如圖4,表3所示。

圖4 B樣條建模補償后垂線偏差誤差

表3 補償后垂線偏差誤差值
由仿真結(jié)果可以發(fā)現(xiàn):未經(jīng)重力補償時垂線偏差真實值最大可達到7″左右,當(dāng)采用非均勻B樣條最小二乘法建模時,垂線偏差各向分量與真實值相近,將非均勻B樣條建模得到的垂線偏差與真實垂線偏差值進行補償求差后,誤差極值僅在1″左右,有較好的重力補償效果,說明采用非均勻B樣條方法可以對局部區(qū)域垂線偏差進行二維整體逼近,在局部特性不失真的情況下具有連續(xù)性。此方法的補償精度明顯高于文獻[18]中采用的EGM2008(2 190階)模型計算出來的垂線偏差精度,說明采用非均勻B樣條進行重力擾動建模是非常有效的。
4.2 重力擾動對慣導(dǎo)補償仿真
仿真條件:陀螺常值漂移0.001(°)/h,隨機游走系數(shù)為0.000 2(°)/h,加速度計常值偏置為10×10-6g,零均值白噪聲為5×10-6g,導(dǎo)航解算周期為0.02 s,無初始對準(zhǔn)誤差,仿真過程中可忽略掉高度通道的影響,即δh=0。仿真時長為24 h。仿真中利用提供的1'×1'網(wǎng)格數(shù)據(jù)插值后得到網(wǎng)格區(qū)域內(nèi)的垂線偏差數(shù)據(jù)來模擬實際重力擾動,加入到慣導(dǎo)系統(tǒng)中可以得到無重力擾動補償時捷聯(lián)慣導(dǎo)誤差如圖5所示。采用上述非均勻B樣條補償?shù)姆椒ǎM行重力擾動補償后,可以得到捷聯(lián)慣導(dǎo)系統(tǒng)誤差如圖6所示。
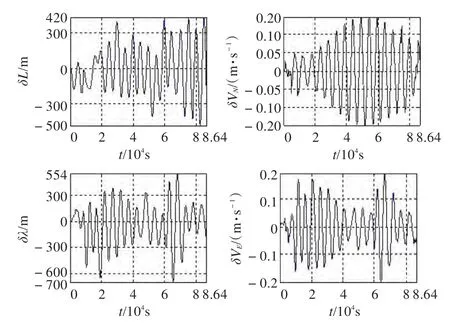
圖5 無重力擾動補償慣導(dǎo)系統(tǒng)誤差
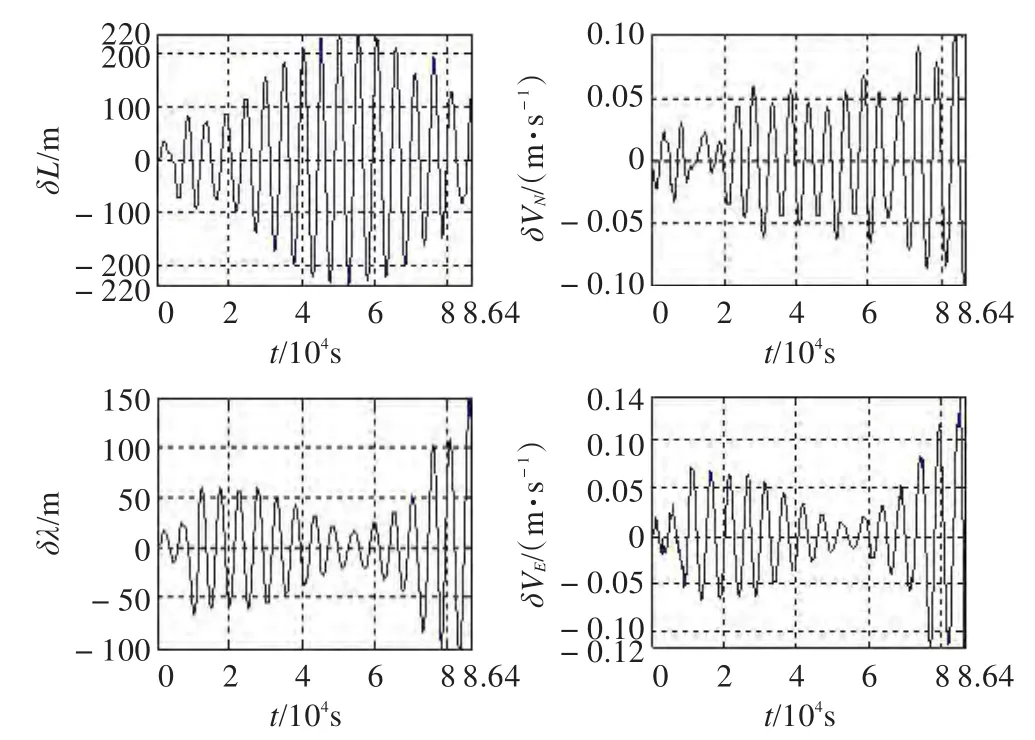
圖6 重力擾動補償后慣導(dǎo)系統(tǒng)誤差
由仿真結(jié)果可以發(fā)現(xiàn):未經(jīng)重力擾動補償?shù)膶?dǎo)航解算所得到的位置誤差范圍為-480~330 m,采用B樣條重力擾動補償后,導(dǎo)航定位精度有了明顯提高,位置誤差范圍縮減到-210~210 m,同時速度誤差也有了明顯地減小,由此可以看出重力擾動造成的慣導(dǎo)位置誤差最大可以達到200 m以上,這與慣性器件造成的誤差基本達到了一個量級,所以必須要進行重力擾動補償。此方法明顯優(yōu)于文獻[19]中提到的直接線性插值重力補償方法。由以上分析可以說明,采用非均勻B樣條方法進行重力擾動補償可更有效地提高慣導(dǎo)精度。
5 結(jié)束語
(1)隨著高精度慣性器件的發(fā)展以及慣導(dǎo)工作時間的延長,重力擾動會引起較大的慣導(dǎo)誤差,成為捷聯(lián)慣導(dǎo)系統(tǒng)的主要誤差源,必須要對其進行適當(dāng)補償,以保證慣導(dǎo)系統(tǒng)在較高的精度范圍內(nèi)工作。
(2)在進行重力擾動補償時,無法精確獲得所有點的垂線偏差數(shù)值,需要建立相關(guān)的重力擾動模型,采用非均勻B樣條方法可以保證在垂線偏差局部特性不失真的前提下進行二維整體逼近,利用所求重力模型對慣導(dǎo)系統(tǒng)補償可以有效地提高慣導(dǎo)精度。
[1]吳太旗.重力場對慣性導(dǎo)航定位誤差影響研究與仿真[J].測繪科學(xué)技術(shù)學(xué)報,2006,23(5):341-344.
[2]李斐,束蟬方,陳武.高精度慣性導(dǎo)航對重力場模型的要求[J].武漢大學(xué)學(xué)報:信息科學(xué)版,2006,31(6):508-511.
[3]Hsu D Y.An accurate and efficient approximation to the normal gravity[C]//IEEE Position Location and Navigation Symposium,1998:38-44.
[4]盧鑫,練軍想,吳美萍.高精度艦載慣性導(dǎo)航系統(tǒng)的重力影響研究[J].導(dǎo)航與控制,2010,9(4):15-21.
[5]陳永冰,邊少鋒,劉勇.重力異常對平臺式慣性導(dǎo)航系統(tǒng)誤差的影響分析[J].中國慣性技術(shù)學(xué)報,2005,13(6):21-25.
[6]Kriegsman B A,Mahar K B.Gravity-model errors in mobile inertial-navigation systems[J].Journal of Guidance and Control,1985,15.
[7]Moryl J,Rice H,Shinners S.The universal gravity moduleforenhanced submarinenavigation[C]//IEEE Position Location and Navigation Symposium,1998:324-331.
[8]Jekeli C.Inertial navigation systems with geodetic applications[M].Berlin:deGruyter,2001:200-230.
[9]Vanderwerf K.Schuler pumping of inertial velocity errors due to gravity anomalies along a popular north pacific airway[C]//IEEE Position Location and Navigation Symposium,1996:642-648.
[10]堯穎婷,沈曉蓉,鄒堯,等.捷聯(lián)慣性導(dǎo)航系統(tǒng)重力擾動影響分析[J].大地測量與地球動力學(xué),2011,31(6):159-163.
[11]李勝全,歐陽永忠,常國賓,等.慣性導(dǎo)航系統(tǒng)重力擾動矢量補償技術(shù)[J].中國慣性技術(shù)學(xué)報,2012,20(4):410-413.
[12]秦永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2006:358-361.
[13]Rogers R M.Applied mathematics in integrated navigation system[M].New York:American Institute of Aeronautics and Astronautics,2007:20-40.
[14]吳太旗,黃謨濤,邊少鋒.高精度慣性導(dǎo)航系統(tǒng)的重力場模型影響模式分析[J].測繪通報,2009,5(5):5-8.
[15]Haxby W F.Gravity filed of the world’s Oceans[R].US:Navy Naval Office of Research,1985.
[16]郭建鋒,歸慶明,楊元喜.局部重力場的非均勻B樣條最小二乘逼近[J].測繪學(xué)報,2000,29(3):189-192.
[17]寧津生,定波,邊少鋒.重力場的樣條逼近[J].測繪學(xué)報,1990,19(4):241-249.
[18]齊顯峰,周巍,崔吉春.EGM2008重力場模型計算中國地區(qū)垂線偏差分析[J].測繪技術(shù)裝備,2011,13(1):6-8.
[19]盧鑫.長航時高精度慣性導(dǎo)航系統(tǒng)重力補償技術(shù)研究[D].長沙:國防科技大學(xué),2010.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32