城市道路T形交叉口斜行斑馬線設計研究*
2014-04-12 08:03:20魏培榮杜志剛黃發(fā)明陶鵬鵬萬紅亮
武漢理工大學學報(交通科學與工程版) 2014年2期
關(guān)鍵詞:設置
魏培榮 杜志剛 黃發(fā)明 陶鵬鵬 萬紅亮
(武漢理工大學交通學院 武漢 430063)
0 引 言
交叉口是車輛與行人匯集、轉(zhuǎn)向和疏散的必經(jīng)之地,是道路網(wǎng)絡的咽喉.因此,正確地設計道路交叉口,合理組織和管理交叉口交通,是提高道路通行能力和保障交通安全的重要方面.國內(nèi)外關(guān)于行人過街設施和人-機沖突的研究較多,P.D.Raymond等[1]指出了設置人行橫道后,會使機動車駕駛員更加小心,會更加留意過街行人;V.P.Sisiopikua等[2]分析了行人使用過街設施的情況,83%的行人會在無信號路段優(yōu)先選擇人行橫道過街,65%的行人則會選擇人行橫道過街;謝春榮[3]指出在平面交叉口處行人與左轉(zhuǎn)機動車的沖突是交叉口沖突存在的主要原因;Lord[4]研究表明T形交叉口比十字型交叉口更易發(fā)生行人與左轉(zhuǎn)機動車的沖突,且受對向車流的干擾較大.因此,合理的設置交叉口內(nèi)的人行橫道,有利于行人迅速的通過交叉口,降低了人-機沖突率,提高整個交叉口的安全性.本文基于非對稱交通需求的現(xiàn)實,提出T形交叉口斜向行人和左轉(zhuǎn)機動車協(xié)同過街,提升交叉口的通行效率與安全.
1 斜行斑馬線的設計
1.1 傳統(tǒng)的斜行斑馬線的設計
斜行斑馬線的運用最早出現(xiàn)在日本[5],設置斜行斑馬線后,斜向過街的行人走行的距離會明顯降低,2007年7月,我國第一例斜交斑馬線出現(xiàn)在杭州,交管局設置了4個全紅相位.根據(jù)相關(guān)研究表明,現(xiàn)存斜行斑馬線設置條件如下:(1)路口信號燈有4綠、4紅(即路口人行橫道信號燈全為綠燈,車輛信號燈全為紅燈);(2)交叉口面積較小;(3)交叉口行人流量大,密度較高,機動車流量較小適于一次性通過.
1.2 協(xié)同過街的斜行斑馬線的設計
孫鋒[6]提出了城市道路上90%以上的交叉口都設有左轉(zhuǎn)專用信號相位,但利用率存在不足.基于這種情況,本文提出了設置協(xié)同過街的斜行斑馬線,充分利用現(xiàn)有交叉口內(nèi)的左轉(zhuǎn)專用信號相位,使斜向過街的行人與左轉(zhuǎn)機動車協(xié)同過街,以提高了交叉口現(xiàn)有道路的利用面積,降低了人-機沖突率,從而提高了交叉口的安全度.圖1為改善后的T形交叉口圖.
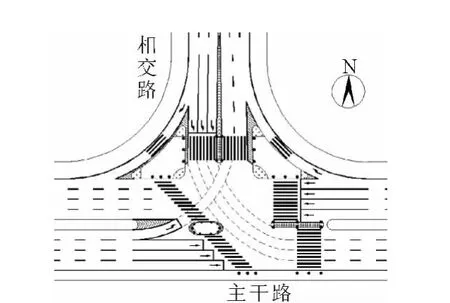
圖1 改善后的標準T形交叉口
2 基于人-機沖突的交叉口平均延誤模型的建立
目前,國內(nèi)外對于行人-機動車沖突延誤這方面的研究甚多,M.M.Ishaque等[7]以不同類型的機動車流量和行人流量為條件,說明系統(tǒng)最優(yōu)的延誤需要綜合考慮機動車和行人的影響.高利平等[8]并指出行人平均延誤與行人到達人行橫道平均距離成正比,遠大于機動車平均延誤,且與后者成反比.任剛,顧程等[9]提出信號交叉口過街行人與機動車沖突危險度模型,闡明了交叉口行人過街沖突危險度的分析過程.本文在前人研究的基礎(chǔ)之上,建立了人-機沖突的交叉口平均延誤模型,用來評價改善前后的交叉口整體延誤狀況.
2.1 參數(shù)的標定
模型基本假設.
1)該模型適用于相交路左轉(zhuǎn)機動車流量大,斜向過街行人需求高的T形交叉口.
2)假設改善前后T形交叉口信號控制的相位相序圖和信號周期不變,只是在改善后的第一相位增加了斜向行人流,見表1.
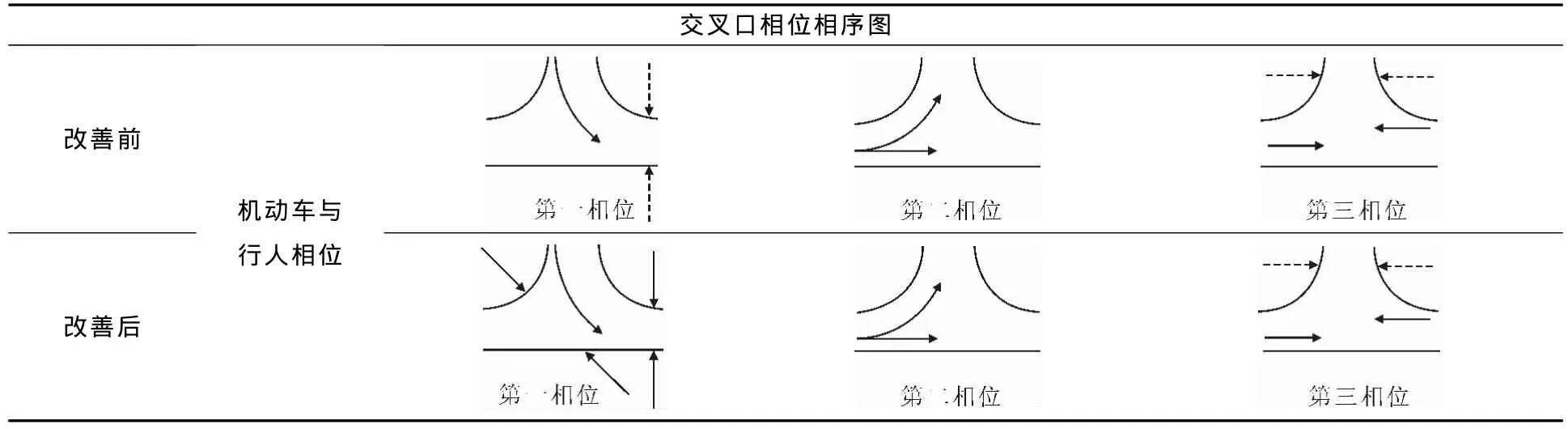
表1 標準T形交叉口改善前后相位相序圖
3)假設T形交叉口主路上機動車車道數(shù)為N1,單個車道的寬度為dm1,非機動車道的寬度為dp1,假設有2條非機動車道,則主路的寬度為L1=N1dm1+2dp1;相交道路上機動車車道數(shù)為N2,單個車道的寬度為dm2,非機動車道的寬度為dp2,假設有兩條非機動車道,則相交道路的寬度為L2=N2dm2+2dp2.
4)假設該交叉口內(nèi)需要二次過街的行人流量為Qp1,人/h,一次過街的行人流量為Qp2,人/h(其中通過主路上的行人流量為Qp21,人/h,相交道路上的行人流量為Qp22,人/h,顯然有Qp2=Qp21+Qp22;相交道路上的機動車總流量為Qb1,pcu/h(其中左轉(zhuǎn)流量為Qb11,pcu/h,右轉(zhuǎn)流量為Qb12,pcu/h,主路上的機動車流量為Qb2,pcu/h.
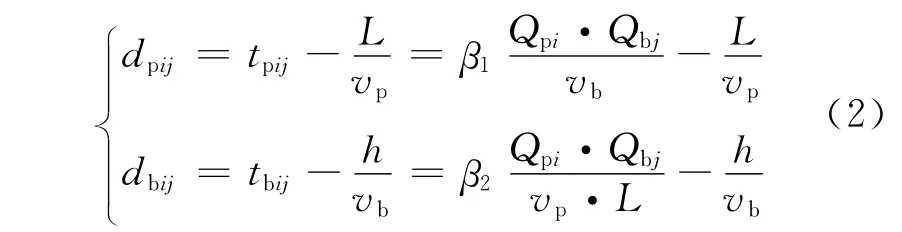
5)當行人與機動車產(chǎn)生沖突時,要采用對沖突區(qū)域占用避讓原則,即行人和機動車二者其中一方占用人行橫道時,另一方需要主動避讓,在避讓的過程中,會產(chǎn)生延誤.顯然,行人通過交叉口的時間tp與過街的行人流量Qpi、機動車的流量Qbj成正比,與所避讓的機動車速度vb成反比;機動車通過交叉口的時間tb與過街的行人流量Qpi、機動車的流量Qbj成正比,與所避讓的行人速度vp及過街行人所走行的距離L成反比.
則行人和機動車通過交叉口的時間分別如下(修正系數(shù)為β1,β2).

在交叉口處,行人的步行距離為L,機動車的駛出交叉口的平均行駛距離為h,則行人和機動車通過交叉口的延誤dpij,dbij分別為
2.2 行人延誤模型
通過交叉口的行人分為2種情況,即一次過街和二次過街,由式(2)可以得出不同情況下的行人延誤如下.
1)一次過街需求,并且通過主路上的人行橫道即可達到目的的
2)一次過街需求,并且通過相交道路上的人行橫道即可達到目的的
3)二次過街需求,分別通過主路和相交道路上的人行橫道才能達到目的的

4)二次過街需求,交叉口內(nèi)設有斜行斑馬線,行人通過斜行斑馬線即可達到目的的

2.3 機動車延誤模型
在不考慮行人與機動車干擾所產(chǎn)生的延誤的情況下,假設主路上的機動車駛出交叉口的平均行駛距離為h0,相交道路上的機動車駛出交叉口的平均行駛距離為h1,由式(2)可以得出,機動車的延誤也分為兩種情況:一是不設置斜行斑馬線;二是設置斜行斑馬線,使相交道路上的左轉(zhuǎn)機動車與斜向過街的行人協(xié)同過街.
2.3.1 當不設置斜行斑馬線時.
1)主路上機動車的延誤
2)相交道路上機動車的延誤
2.3.2 當設置斜行斑馬線時,此時斜向過街的行人與左轉(zhuǎn)機動車協(xié)同過街,主路上機動車的延誤并沒有改變,相交道路上的機動車延誤會有所降低,此時相交道路上的機動車延誤
2.4 行人-機動車沖突平均延誤模型
將行人與機動車的延誤單位統(tǒng)一化,假設機動車的承載率為γ(人/車),則行人-機動車組成的系統(tǒng)的平均延誤模型如下.
1)交叉口不設置斜行斑馬線

2)交叉口設置斜行斑馬線

由式(11)和式(12)可以分別求出交叉口內(nèi)不設置斜行斑馬線和設置斜行斑馬線兩種情況下的行人-機動車沖突平均延誤值,斜向過街行人流量、相交路左轉(zhuǎn)機動車比例和行人的步行速度都會影響整個交叉口的延誤值,具體影響趨勢見圖2.
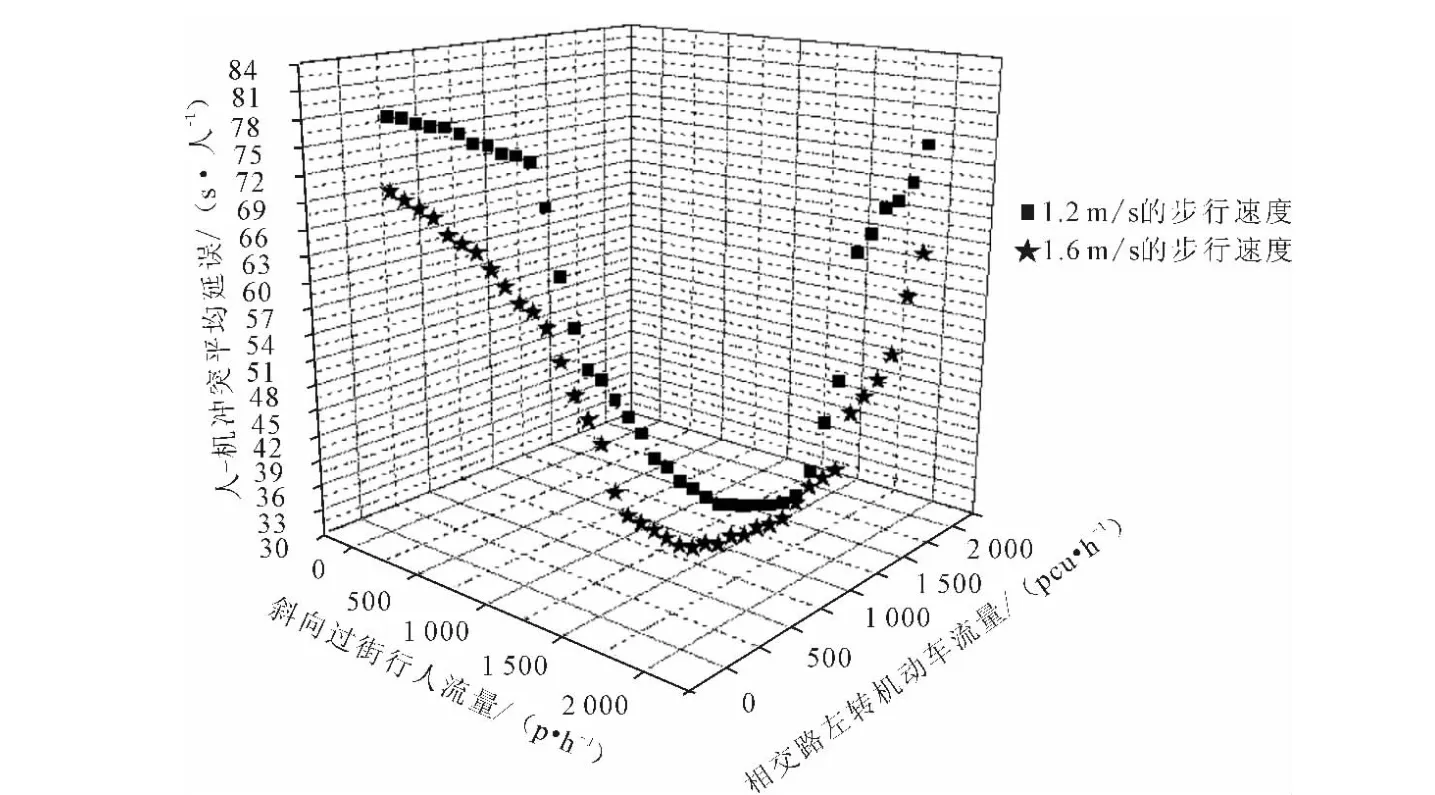
圖2 斜向行人流-左轉(zhuǎn)機動車與平均延誤的關(guān)系圖
從圖中可以看出,人-機沖突平均延誤值隨著斜向過街行人流量和相交路左轉(zhuǎn)機動車流量的增加呈現(xiàn)出先降低后增加的趨勢,且步行速度越高,平均延誤值越低,步行速度越低,平均延誤值越高,即平均延誤值與行人的步行速度呈負相關(guān)關(guān)系,當斜向過街行人流量在800~1 600人/h之間,相交路左轉(zhuǎn)機動車流量在700~1 850pcu/h之間時,平均延誤值降低到最小值,說明整體效益有了顯著提高,比較適合設置斜行斑馬線;當斜向過街行人流量小于800人/h或大于1 600人/h,相交路左轉(zhuǎn)機動車流量小于700pcu/h或大于1 850pcu/h時,平均延誤值反而增加,說明整體效益降低了,此時不適合設置斜行斑馬線.
3 實例驗證
本文以武漢市解放大道與寶豐路的交叉口(T形交叉口)為例,見圖3,提出了在本交叉口設計斜行斑馬線,使斜向行人與左轉(zhuǎn)車輛協(xié)同過街,并對改善后的交叉口進行評價.
3.1 現(xiàn)狀調(diào)研
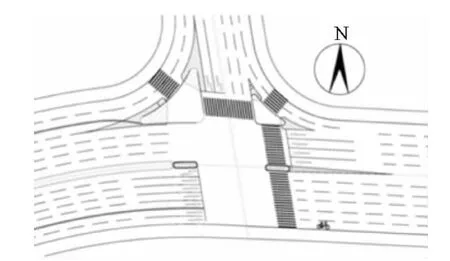
圖3 寶豐路-解放大道交叉口現(xiàn)狀圖

表2 解放大道-寶豐路交叉口機動車流量流向統(tǒng)計
由表2可見,寶豐路左轉(zhuǎn)進入解放大道的機動車數(shù)量比較大,占到該路機動車總數(shù)量的52%以上;二次過街行人需求量大,但違章率較高,達到了50%以上,給交叉口造成極大的安全隱患.
3.2 協(xié)同過街的斜行斑馬線的設計
在原有的交叉口之上,在沒有設置人行過街橫道的這側(cè)設置斜行斑馬線,并在路中設置行人二次過街安全島并在安全島四周設置安全島隔離墩,并將設置斜行斑馬線的一側(cè)的機動車直行進口道延長,設置鋸齒狀停車線及左轉(zhuǎn)待轉(zhuǎn)區(qū),同時在交叉口內(nèi)設置機動車左轉(zhuǎn)導向線,相交道路左轉(zhuǎn)機動車與斜向行人過街采用同一信號相位.另外,把原有的主干道上的人行橫道改設成Z字形人行道,即把出口道對應的人行道后退一定距離,以減少交叉口內(nèi)的沖突度.改善后的交叉口圖形見圖4.
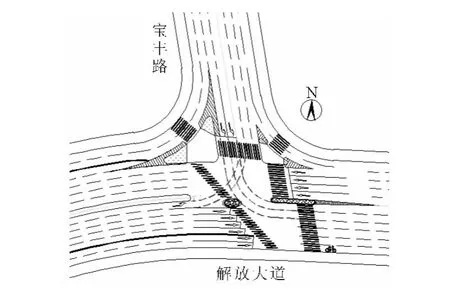
圖4 寶豐路-解放大道交叉口改善設計圖
3.3 改善前后評價
1)利用模型進行評價 利用式(11),(12)分別求出交叉口改善前后的行人-機動車沖突平均延誤,其中:vp=1.4m/s,vb=5.6m/s,γ=1.5 pcu,β1=500,β2=8 000,經(jīng)計算可以得到當交叉口內(nèi)不設置斜行斑馬線時,行人-機動車沖突平均延誤d=52s/人;當交叉口內(nèi)設置斜行斑馬線時,行人-機動車沖突平均延誤d=34s/人.

表3 改善前后延誤、行人違章率和道路面積利用率對比表
經(jīng)比較發(fā)現(xiàn),改善后,交叉口的行人-機動車沖突平均延誤值降低了34.6%,過街行人的違章率降低了65.7%,間接的降低了交叉口內(nèi)的事故發(fā)生率,道路面積利用率有所增加,說明此種改善設計是合理可行的.
2)利用VISSIM仿真進行評價 結(jié)合VISSIM仿真軟件,對改善后的交叉口進行仿真,計算得到各進口道的延誤值見表4.

表4 VISSIM仿真后的各進口道延誤值
從上表中可以看出,各進口道不同車道的延誤值在30~37s,與利用模型計算的人-機沖突平均延誤值相差很小,說明利用該人-機沖突平均延誤模型來評價改善后的交叉口是合理可行的.
4 結(jié)束語
傳統(tǒng)的T形交叉口改善設計往往只對機動車做了考慮,以“車本主義”為主,對行人的考慮甚少,由于行人在交通流中屬于弱勢群體,在交叉口內(nèi)發(fā)生的交通事故中,行人的傷害程度一直是最大的.因此,本文在以往的“車本主義”之上,體現(xiàn)了“以人為本”的思想,充分考慮了行人過街的各種需求,設置了斜向行人與左轉(zhuǎn)機動車協(xié)同過街的斜行斑馬線,并建立了行人-機動車沖突平均延誤模型,并得出了這種斜行斑馬線的適用條件.最后以武漢市解放大道與寶豐路交叉口為例進行驗證,利用模型和VISSIM仿真兩種方法計算改善后的延誤,結(jié)果表明,改善后,整體延誤值顯著降低,說明在適用范圍之內(nèi),設置這種斜行斑馬線能夠減少違章率,大大提高斜向行人通行效率,縮短行人的通行距離,有效減少行人-機動車平均延誤,降低人-機沖突,是一種提高交叉口機動車左轉(zhuǎn)相位有效使用面積的方法.在經(jīng)濟方面,此方法投資少,改善效益好,值得推廣應用.
[1]RAYMOND P D,KNOBLAUCH R L.The effect of crosswalk markings on vehicle speeds[J].TRB,Washington D.C2000,112-117.
[2]SISIOPIKUA V.P,AKIN D.Pedestrian behaviors at and perceptions towards various pedestrian facilities:and examination based on observation and survey data[J].Transportation Research Part F 2003.6.249-274.
[3]謝春榮.城市道路信號交叉口行人與機動車沖突分析[D].昆明:昆明理工大學,2009.
[4]LORD D.Analysis of Pedestrian conflicts left-turning traffic[J].Transportation Research Record,2006,No.1982:61-67.
[5]中國日報網(wǎng)環(huán)球在線.為緩解交通擁堵,倫敦斥資500萬建“對角線”人行道[N].2009-11-04.
[6]孫 鋒.信號控制交叉口左轉(zhuǎn)專用相位設置依據(jù)研究 [D].長春:吉林大學,2006.
[7]ISHAQUE M M,NOLAND R B.Behavioural issues in pedestrian speed choice and street crossing behaviour:a review[J].Transport Reviews,2008,28(l):61-85.
[8]高利平,陳紹寬.基于人行橫道位置的行人-機動車延誤模型[J].吉林大學學報:工學版,2009,39(S2):47-51.
[9]任剛,顧程等.信號交叉口過街行人與機動車沖突危險度建模[J].交通運輸系統(tǒng)工程與信息,2012(5):76-81.
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業(yè)后醫(yī)學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫(yī)學院學報(2015年1期)2015-12-27 13:44:40
醫(yī)學教育管理(2015年3期)2015-12-01 06:43:16